舰船尾流气泡目标激光后向散射特性研究
2023-12-01宗思光杨劭鹏段子科
宗思光,张 鑫 ,杨劭鹏,段子科,陈 报
(1.海军工程大学 电子工程学院,湖北 武汉 430034;2.海军航空大学 青岛校区,山东 青岛 266041)
1 引言
为了适应新时代的战争需求,响应科技强军号召,用先进的科学手段,自动化、智能化、高效化探测跟踪舰船变得至关重要。舰船在航行过程中,特别是在水面航行时,不可避免地会产生尾流。所谓尾流,是指由于螺旋桨的空化、海浪的破碎以及船体水线部分卷入大量空气,导致在舰船尾部的海水中形成含有大量气泡的长尾流区[1-2]。尾流区的声、光、热、电、磁等物理特性与非尾流区明显不同。目前在实际中真正得到应用并具有良好作战效果的舰船跟踪探测设备是声尾流自导装置。但传统的声尾流自导装置存在自噪声干扰大,受海况、海水温度梯度等的影响大等问题,难以搭载高速移动载体进行高精度探测。由于激光具有超短波特性,激光对传播介质的变化比声波更敏感,受水温和噪声影响较小,可搭载高速移动载体,可对舰船尾流中的微气泡进行高精度检测[3]。为了提高激光光尾流制导距离和探测信噪比,研究不同距离、不同气泡尺度、不同气泡数密度和不同气泡层厚度的气泡目标后向散射特性具有重要的理论与应用价值。
舰船尾流气泡目标特性通常指气泡数密度、气泡层厚度、气泡尺度等特征。舰船尾流气泡目标特性与舰船推进器类型、螺旋桨转速、吃水深度、航向(直线、转弯机动等)、气象水文条件等多种因素相关[4]。舰船尾流形成的近程尾流气泡尺寸在1 000 μm 以下时,远程尾流在海水中存留距离比较长,尺度一般为10~300 μm,其中以40~80 μm 居多[5]。舰船尾流区域气泡分布密度约为104~108m-3,一般要比周围海水中的气泡大1~3 个量级[6-7]。气泡数密度随气泡半径密度大致成线性分布,半径越小的气泡其数密度越大。气泡越小,其浮升速度越慢,在浮升的过程中,尺寸会越来越大,上升速度会随之变快[8]。气泡层厚度一般为舰船吃水深度的4~7 倍,随时间的增加,会逐渐变薄。
针对舰船尾流激光制导应用背景,通过研究舰船尾流气泡目标后向散射特性可提高舰船尾流探测信噪比及光尾流制导距离,提升舰船尾流气泡目标的检测能力。采用蒙特卡洛仿真与实验结合的方式,研究了不同距离、不同尺度、不同数密度、不同厚度舰船尾流气泡目标的激光后向散射特性。该研究成果已用于某水下探测系统的设计与工程实践。
2 蒙特卡洛模型建立
考虑水体介质多次散射的情况,即水中散射粒子很稠密,同时考虑单次,二次,及更高次的散射和散射路径的衰减[9-10],光子海水中的传播模拟需要确定以下条件:波长、能量、自由程、新的自由程、散射角、碰撞后的运动方向、光子接收或消亡[11-12]。假设每个光子能量相同,则能量由总光子数代替,确定总发射光子数为 106,激光波长为532 nm[13]。
2.1 自由程及新的自由程确定
准直光束在介质中传播的朗伯-比尔定律为[14]:
由公式(1)可推导得
新的自由程为:
其中:c为介质光学衰减系数;l是光束传播距离;lm+1为碰撞m次后新的光束传播距离;E0是光束的初始能量;El是准直光束传播距离l之后的剩余能量;Pm为运动l发生碰撞的概率;Pn为运动l不发生碰撞的概率;r为粒子半径;N为光子个数;ξ、ξm+1为(0,1)间均匀分布的随机数。
2.2 散射角及新的运动方向确定
I0为初始入射方向,以入射方向为x轴建立坐标系Oxyz,3 个方向的余弦分别为c osα=1,cosβ=0,c osγ=0。第一次碰撞引起散射后,光子运动方向变为I1,以I1方向为x轴建立坐标系O′x1y1z1,那么在坐标系O′x1y1z1中的方向余弦变为 cosα1,cosβ1,cosγ1,其中 α1=θ1,θ1为第一次碰撞的散射角,如图1(彩图见期刊电子版)所示。
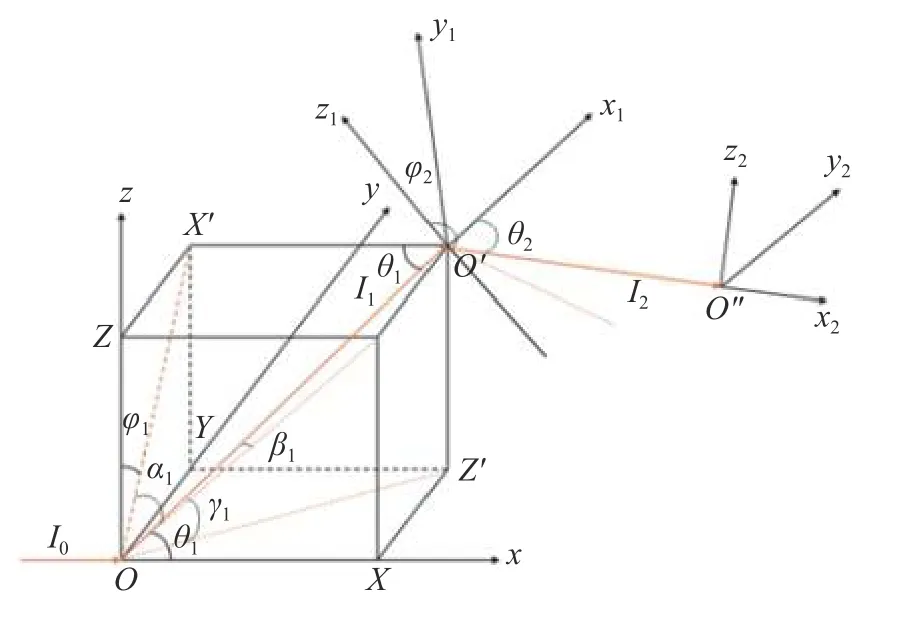
图1 单个光子两次碰撞散射坐标系Fig.1 Coordinate systems for single photon double collision scattering
第二次碰撞引起散射过程后,光子运动方向变为I2,以I2方向为x轴建立坐标系O’’x2y2z2,散射 角为 θ2,偏转角为 φ2,那么 在相 对坐标 系O′x1y1z1中的方向余弦为(cosα2,cosβ2,cosγ2)=(cosθ2,sinφ2·sinθ2,cosφ2·cosθ2)。现需将此方向余弦转换为Oxyz中的方向余弦,经过坐标系转换后,I2在坐标系Oxyz的方向余弦变为:
光子在第m次碰撞后,其出射方向相对于前一个坐标系为 (αm,βm,γm),在第m+1次碰撞后,其出射方向相对于第m坐标系为 (αm+1,βm+1,γm+1)。其中:
2.3 光子生存确定
设置光子生存权值阈值为wY,单次散射率为wD,第m+1 次碰撞后光子权值wm+1为
若wm+1>wY,则光子继续运动,若wm+1≤wY,则光子被吸收。蒙特卡罗光子模拟运动程序如图2 所示。
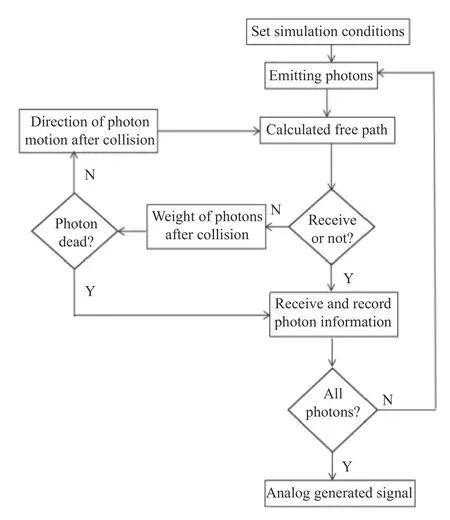
图2 光子模拟运动程序图Fig.2 Flow chart of photon simulated motion
3 舰船尾流气泡目标后向散射仿真研究
根据上述过程,利用蒙特卡洛模型对气泡位置、气泡尺寸、气泡数密度和气泡层厚度进行仿真研究。仿真条件设置如下:输出波长为532 nm,海水的衰减系数为0.041 9 m-1[15]。可模拟纯净海水水质,设海水散射率为0.8。
研究不同气泡距离下的气泡后向散射特性。仿真条件设置如下:气泡数密度为103m-3,气泡层厚度为1 m,气泡尺寸为80 μm,气泡距离分别为3、5、7、9、11 m。得到的仿真图如图3(彩图见期刊电子版)所示。在这里主要关注有气泡与无气泡时的变化情况。由图3 可以看出气泡的回波信号向下凹陷,且随着距离的增加,气泡后向散射回波不断向右转移,且气泡回波幅度逐渐降低。原因是随着距离的增加,光子自由程增加,碰撞概率增加,导致其回到接收系统的时间变长,从而使回到接收系统的光子数减少。仿真结果表明:距离会影响气泡回波信号出现的时间和气泡回波幅度;近距离气泡比远距离气泡回波幅度更强,且更易检测。
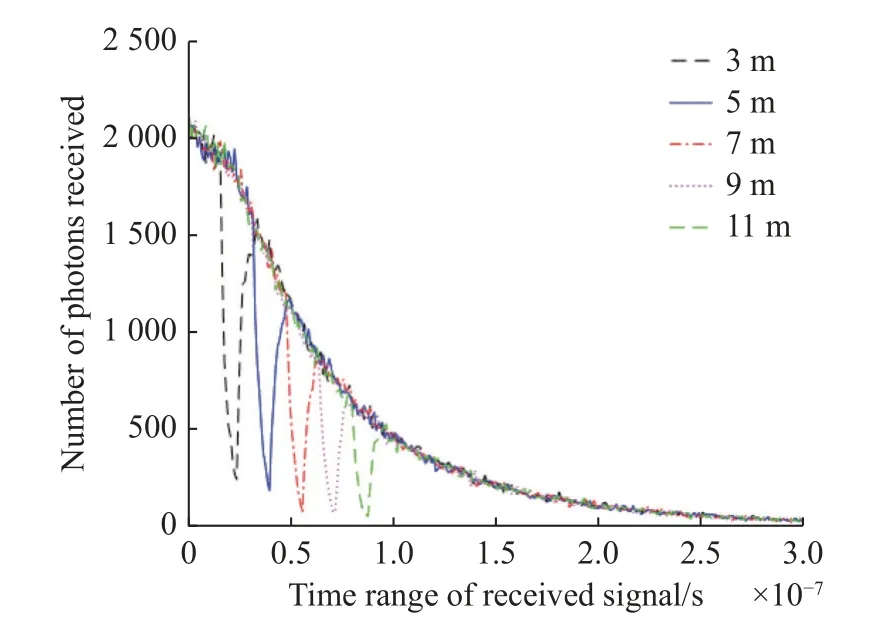
图3 不同距离下气泡后向散射回波信号Fig.3 Backscattering echo signal of bubble under different distances
不同气泡数密度下的气泡后向散射特性,如图4(彩图见期刊电子版)所示。设置气泡数密度为102~108m-3,气泡距离为11 m,其余条件不变。由图4(彩图见期刊电子版)可以看出气泡的回波信号向下凹陷,可见,随着气泡数密度的增加,气泡后向散射信号叠加在一起。仿真结果表明:随着气泡数密度的增加,其气泡后向散射回波始终存在,不会影响气泡回波信号的幅度。该实验中,仿真得到的结果可能与实际得到的结果不符。为探究其原因,本小节最后开展了各气泡目标特性的影响研究。
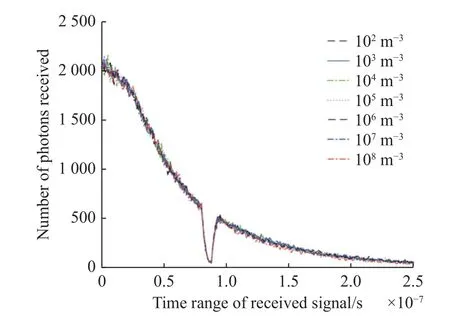
图4 不同气泡密度下的后向散射回波信号Fig.4 Backscattering echo signal of bubble under different bubble densities
接下来,将研究不同气泡层厚度下的气泡后向散射特性。设置气泡层厚度分别为0.05、0.1、0.3、0.5、0.7、0.9、1 m,其他气泡特性条件不变。得到的仿真图如图5(彩图见期刊电子版)所示。由图5(a)可以看出气泡的回波信号向下凹陷,且随着气泡层厚度的增加,气泡的后向散射回波信号幅度逐渐增强。表明气泡层厚度主要影响气泡后向散射幅度,在气泡层厚度为0.05 m 时,接近水体回波信号。设置气泡数密度为109m-3,其回波信号如图5(b)所示。可见,随着气泡层厚度的增加,其气泡回波信号幅度不断增强,且衰减加快。仿真结果表明在气泡数密度为109m-3时,气泡层厚度会影响气泡回波信号的脉冲宽度。
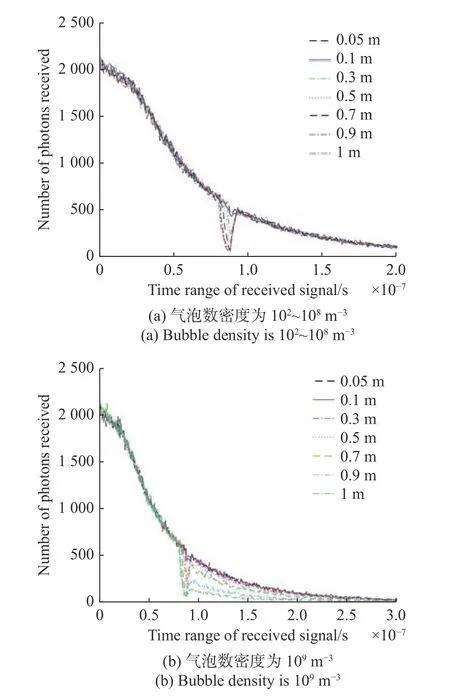
图5 不同气泡厚度下的后向散射回波信号Fig.5 Backscattering echo signal of bubble under different bubble thicknesses
进一步,研究了不同气泡尺度下的气泡后向散射特性。设置气泡数密度为102~107m-3时,气泡尺寸分别为20、40、60、80、100、300、500 μm,气泡层厚度为1 m,其余条件不变。得到的回波信号图同图5 一样叠加在一起且无变化。当气泡数密度设置为108m-3时,此时,得到仿真图如图6(a)所示。可见,气泡尺寸为300 μm 和500 μm的气泡回波信号快速衰减,且不能恢复到原来水体的回波信号,气泡脉冲宽度出现展宽。气泡密度设置为109m-3时,得到的仿真图如图6(b)所示。可见,气泡尺度为60 μm 的回波信号已经恢复不到原来水体的回波信号幅度。随着气泡尺寸增加,水体回波信号不断衰减,气泡尺寸为100 μm 时回波不再上升,气泡脉冲宽度展宽。仿真结果表明:当气泡数密度为108m-3时,大尺度气泡会影响水体回波信号的衰减速率及气泡回波信号的脉冲宽度。气泡密度为109m-3,气泡尺寸为60 μm 时水体回波就开始加速衰减,气泡回波的脉冲宽度出现展宽。
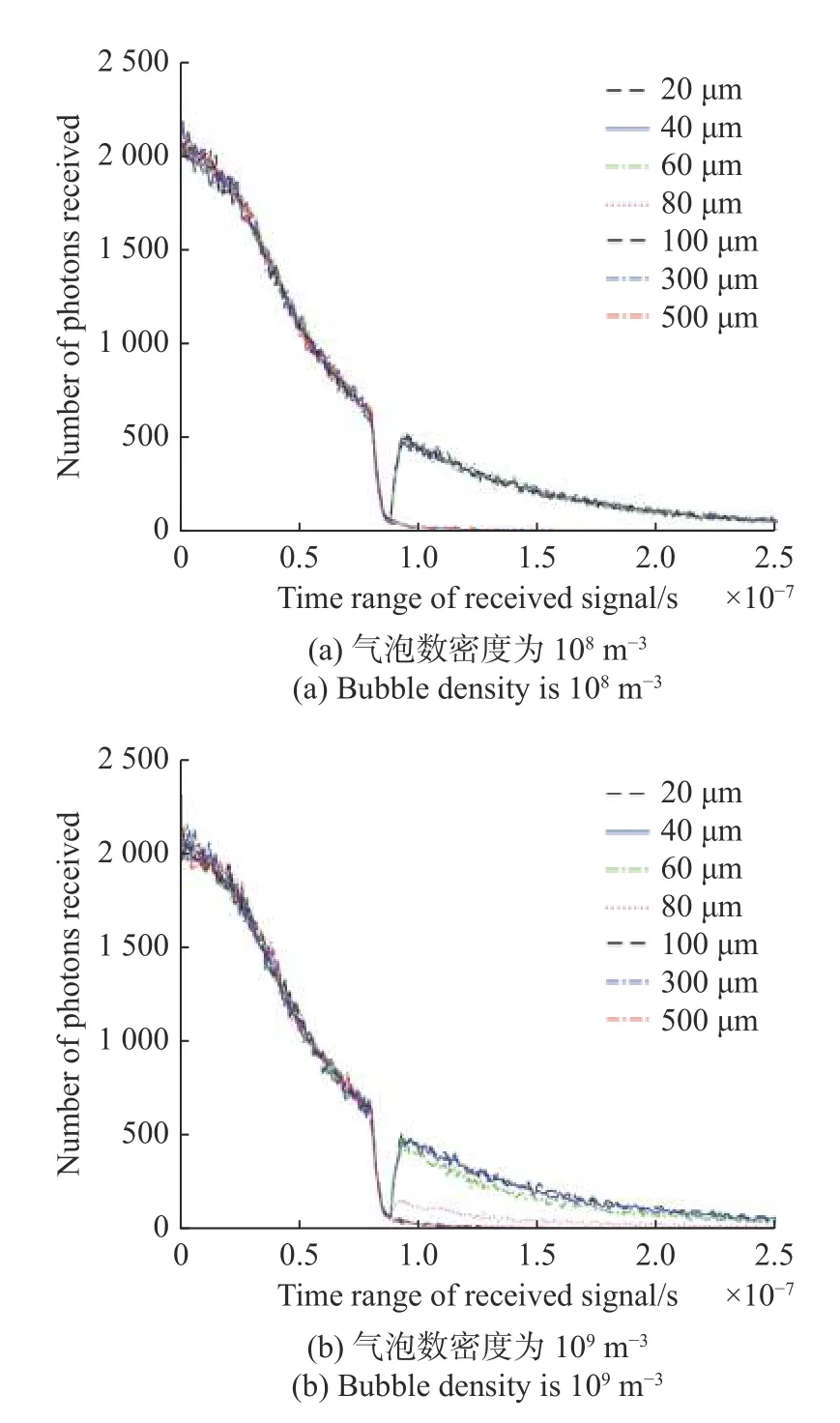
图6 不同气泡尺寸下的后向散射回波信号Fig.6 Backscattering echo signal of bubble with different bubble sizes
最后,研究了气泡尺寸、气泡数密度和气泡层厚度对气泡后向散射的影响。设置气泡数密度分别为102~108m-3和109m-3,气泡尺寸分别为20、40、60、80、100、300、500 μm,气泡层厚度为0.05 m。在此种情况下,气泡回波与水体回波基本一致,所以在这种情况下,气泡层厚度的影响最大。得到的仿真图如图7(彩图见期刊电子版)所示。由图7(a)可知,气泡数密度和气泡尺寸对水体回波信号无影响,气泡层厚度的影响最大。气泡数密度为109m-3,仿真图如图7(b)所示。可见,从气泡尺度为80 μm 时,水体回波信号开始出现大幅度衰减,此时,气泡尺寸和气泡数密度的影响因子最大。气泡数密度在108m-3以下时,气泡层厚度是影响气泡回波信号幅度的主要因素,超过了气泡数密度和气泡尺寸对回波信号产生的影响。所以在气泡数密度仿真实验中会出现回波信号一致的情况。在气泡数密度为109m-3时,大尺寸气泡会展宽回波信号脉冲宽度。此时,气泡数密度和气泡尺寸的影响因子最大。
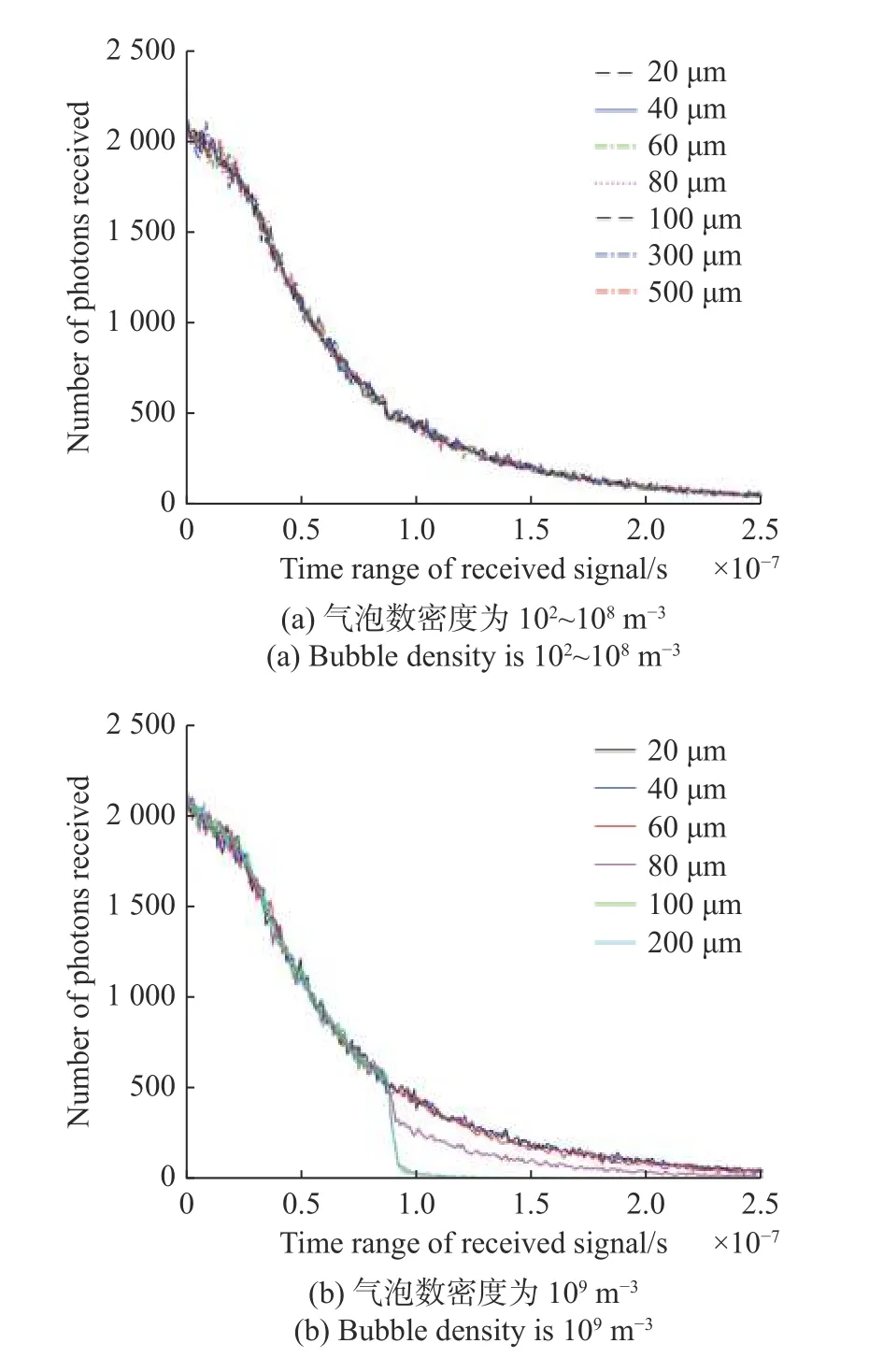
图7 不同气泡目标特性下的后向散射回波信号Fig.7 Backscattering echo signals with different bubble target characteristrics
通过仿真分析可得:近距离的气泡要比远距离的气泡更容易检测;当气泡数密度为102~108m-3,气泡层厚度大于0.05 m 时,大尺度和小尺度气泡始终存在回波信号,气泡层厚度小于0.05 m 时无回波信号,气泡层厚度特性对气泡后向散射的影响因子最大;在气泡数密度为109m-3,气泡层厚度在0.05 m 以下时,大尺度气泡回波信号脉冲宽度会展宽,气泡数密度和尺度特性对气泡的后向散射的影响因子最大。
4 实验及分析
采用激光发射系统、激光接收系统、激光回波APD(Avalanche Photo Diode)接收处理系统以及气泡源发生器构建了不同气泡距离、不同气泡数密度、不同气泡层厚度和不同尺度的激光后向散射测试实验系统。激光发射与接收装置之间的轴距为250 mm,接收镜头直径为50 mm,接收视场角为6°,APD 的接收增益为-40 dB。本实验中,气泡与激光发射机、接收机的距离分别设置为3、4、5、6、7 m。在实验室条件下,难以模拟各种不同尺度、不同数密度的气泡。在所构建实验系统中,气泡源发生器分别采用微孔陶瓷、钼丝电解两种模式产生典型的不同尺度的气泡。其中,采用微孔陶瓷产生大气泡。利用气泵打压进微孔陶瓷产生尺度较大的气泡,其产生气泡的尺度和陶瓷管中陶瓷缝隙有关,一般可模拟产生100~300 μm 半径尺度的气泡。采用钼丝电解方法产生小气泡。其产生的气泡尺度和钼丝直径大致相同,选用的钼丝直径为20~30 μm,则气泡尺度大约在20~30 μm 左右。100~300 μm 气泡厚度分别设置为0.025、0.05、0.075、0.1、0.125 m。实验中,无法具体测量实际产生的气泡密度,但100~300 μm 气泡是由出气空气泵将气压进微孔陶瓷缝隙产生的,故可通过控制出气气压即可控制气泡密度。出气气压分别设置为10、15、20、25、30 kPa。对于20~30 μm 气泡,同样无法实际测量其气泡密度,但20~30 μm 气泡是由钼丝电解水产生的,加大电流可以加快电解速度,即可模拟不同气泡数密度,设置电流分别为0.2、0.4、0.6、0.8、1 A。20~30 μm 气泡层厚度分别设置为0.05、0.1、0.2、0.3 m。实验系统设计、水池及典型气泡的激光散射图如图8 所示。
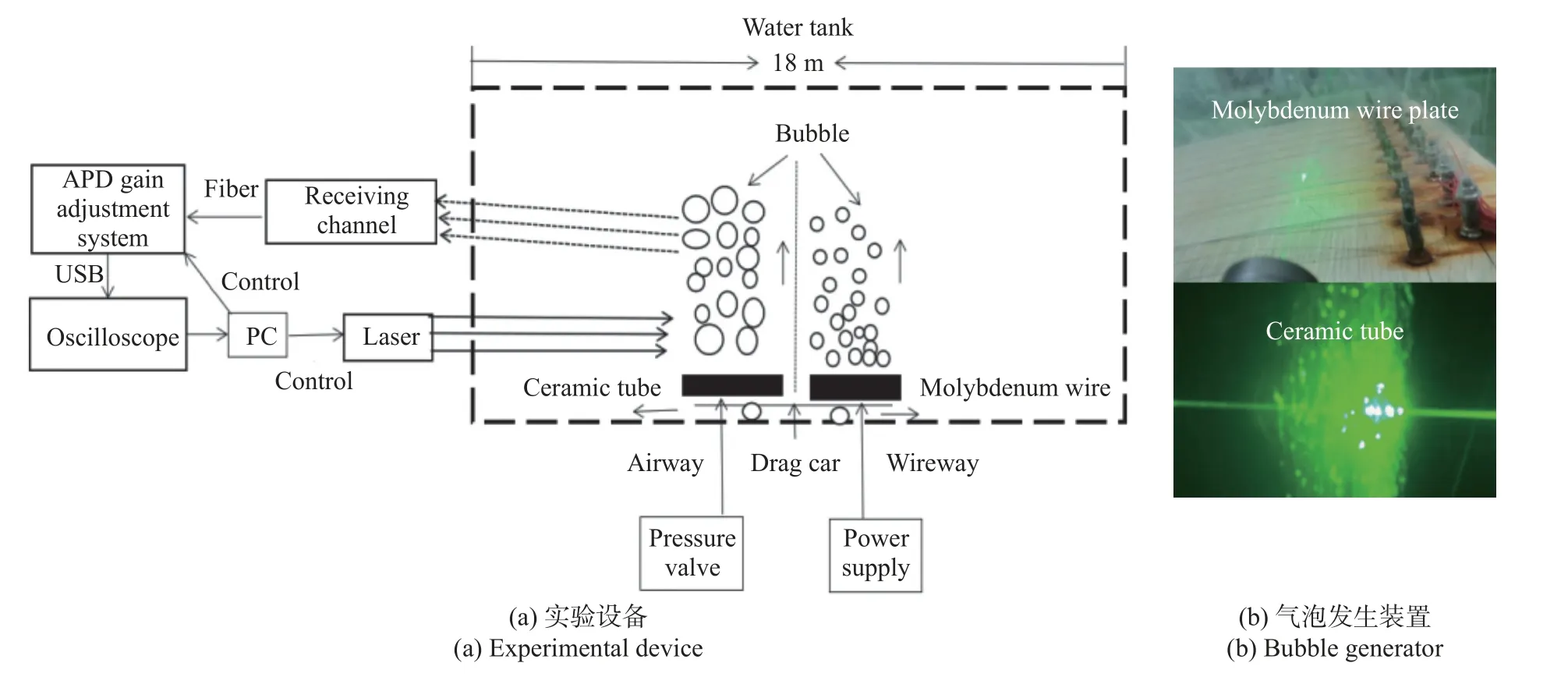
图8 实验系统设计Fig.8 Experimental system design
空气泵气流通过微孔陶瓷产生的100~300 μm气泡在不同距离、不同气泡层厚度、不同气泡数密度的激光后向散射回波强度测试数据如图9(彩图见期刊电子版)所示。通过数据分析可知:随着距离的增大,气泡的回波幅度逐渐降低,在5、6、7 m 时接近水体背景幅度,距离从3 m 变化到7 m 信号幅度降低0.6 V,脉冲展宽相对于水体背景展宽16.3 ns。结果表明近距离的100~300 μm气泡会增大回波幅度和展宽脉冲宽度,远距离的100~300 μm 气泡较难检测。由图9(b)可以看出:随着气泡层厚度的增加,气泡的回波幅度逐渐增大,气泡层厚度从0.025 m 增加到0.125 m 的过程中,幅值增大0.19 V,脉冲展宽相对于水体背景展宽6 ns。这说明气泡层厚度会影响水体回波幅度和脉冲展宽。对100~300 μm尺寸气泡进行气泡层厚度、气泡数密度的激光后向散射回波测试,得到不同气泡距离、气泡层厚度和气泡数密度下水体回波峰值幅度变化情况,如图10 所示(彩图见期刊电子版)。通过分析可以得出,气泡数密度及气泡层厚度的变化始终存在气泡回波幅度,且在气压比较小时,幅值变化不如在气压较大时大,但也出现了部分气泡层厚度小反而回波信号强的情况。综上所述,气泡数密度特性要比气泡层厚度特性对舰船尾流探测的影响更大,气泡层厚度特性对气泡回波特性的影响规律不再和单个目标特性变化时的一样,气泡数密度特性对气泡回波特性的影响最大。上述结果进一步验证了前面所得出的舰船尾流气泡数密度与气泡尺度对舰船尾流探测的影响规律。
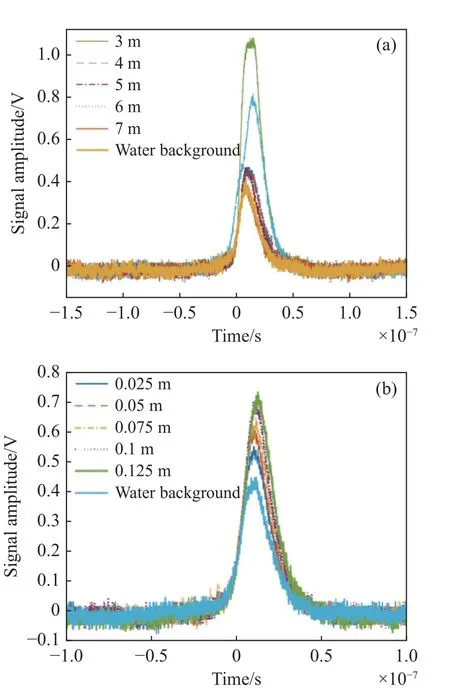
图9 (a) 不同气泡距离和(b)不同气泡层厚度下的气泡激光后向散射信号强度Fig.9 Laser backscattering signal intensities under (a) different bubble distances and (b) different bubble thicknesses
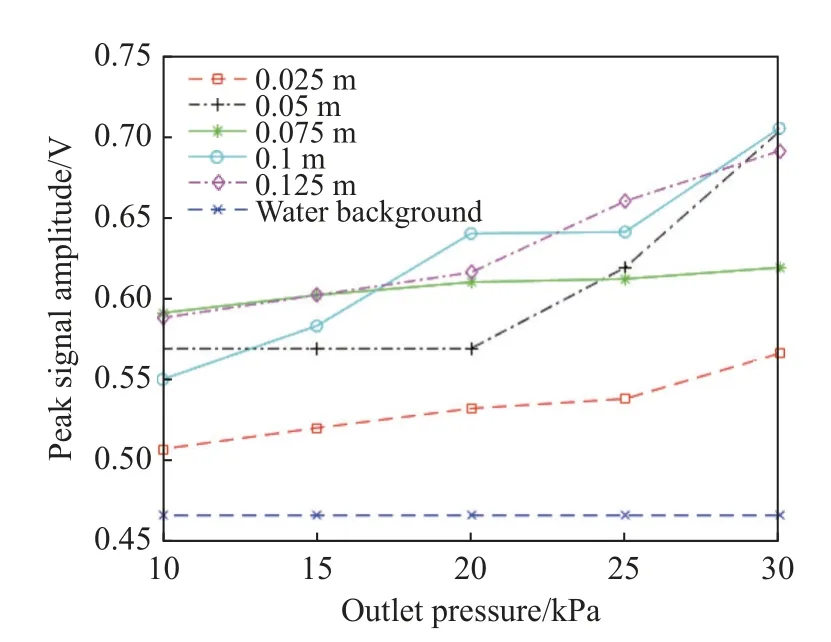
图10 不同气泡厚度和数密度下水体回波峰值幅度Fig.10 Peak echo amplitude of water body under different bubble thicknesses and different densities
对钼丝电解水产生的20~30 μm 气泡进行不同距离、不同气泡层厚度、不同气泡数密度实验,如图11(彩图见期刊电子版)所示。由图11(a)可以看出随着距离的增大,气泡的回波幅度逐渐降低,距离从3 m 变化到7 m 时幅值降低了0.38 V,在4~7 m 位置处接近水体背景幅度,3 m 时水体脉冲展宽为11.5 ns,其余距离下基本无变化。由此可知,探测系统对远距离的小气泡探测灵敏度较低。由图11(b)可以看出气泡数密度在电流为1 A 时最大。随着电流降低,气泡数密度不断降低,水体激光散射回波幅度逐渐降低,从1 A到0.2 A 幅值降低0.36 V,脉冲宽度逐渐变窄,脉冲宽度降低10 ns。在电流为0.2 A 时接近水体背景信号,这表明在气泡数密度较小时,探测系统对20~30 μm 稀疏气泡的探测灵敏度较低。由图11(c)可以看出随着气泡层厚度的增加,气泡的回波幅度和脉冲展宽逐渐增大,气泡厚度从0.05 m 变化到0.3 m 时,幅值升高0.56 V,脉宽增大23 ns。由此可知,气泡层厚度会影响气泡回波幅度和脉冲展宽。通过对气泡目标特性进行对比研究,可以发现气泡层厚度特性要比其他目标特性对舰船尾流探测的影响更大,这一结论验证了上一节舰船尾流气泡层厚度特性对舰船尾流探测的影响规律。
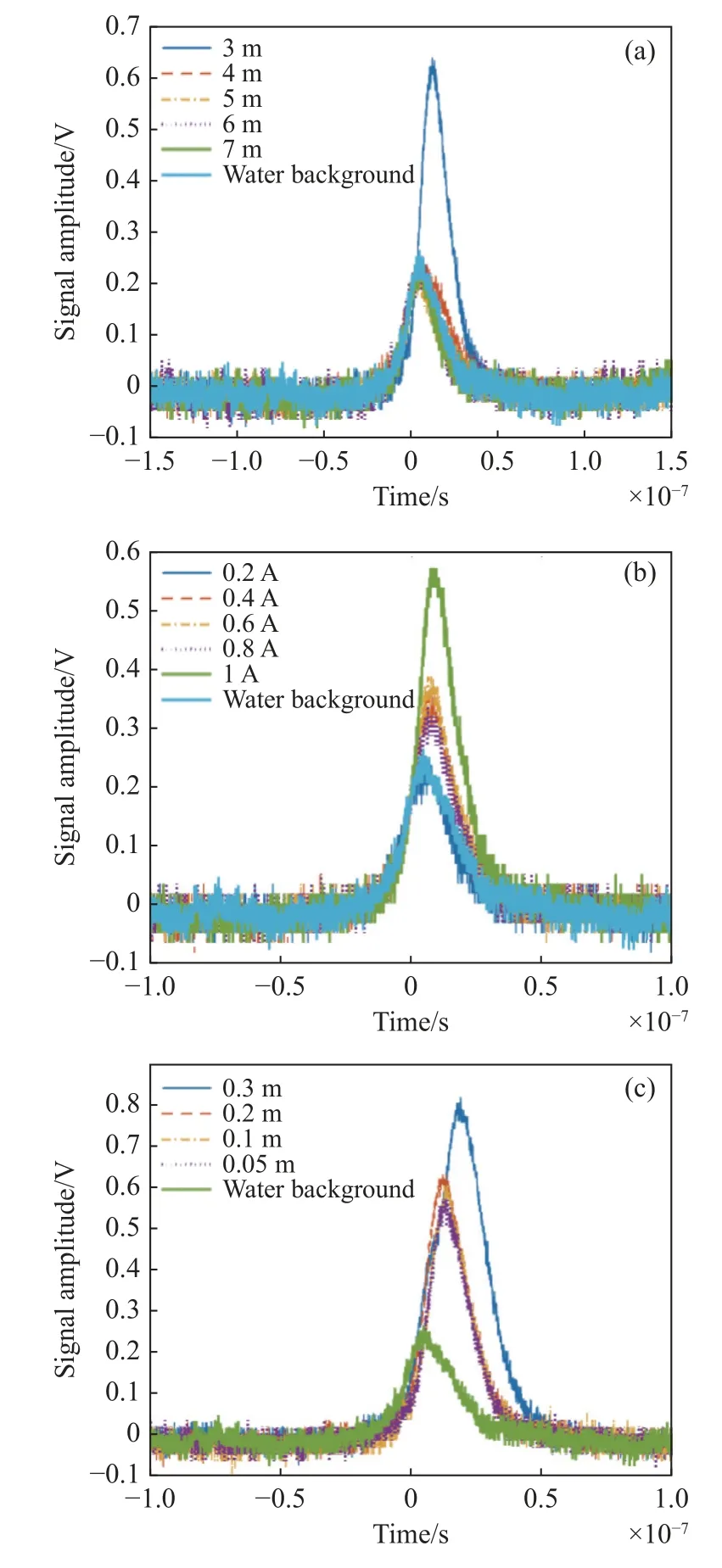
图11 (a) 不同气泡距离;(b) 不同气泡数密度;(c) 不同气泡层厚度下的水体激光后向散射信号强度Fig.11 Laser backscattering signal intensities of water body under (a) various bubble distances,(b) different bubble densities and (c) different bubble thicknesses
将100~300 μm 和20~30 μm 气泡在不同距离下进行对比,如图12 所示。由图12 可知,随着距离的增加,大尺度和小尺度气泡峰值幅度和脉冲宽度均逐渐降低。大尺度气泡回波信号峰值幅度从3 m 到5 m 下降了0.6 V,5 m 以后基本保持在0.5 V 左右,脉冲宽度从3 m 到6 m 变窄13 ns,7 m 时增加至56 ns。小尺度气泡回波信号峰值幅度从3 m 到4 m 下降了0.27 V,4 m 以后基本保持在0.25 V 左右,脉冲宽度从3 m 到5 m 变窄16 ns,5 m 以后保持在45 ns 左右。100~300 μm气泡要比20~30 μm 气泡在4 m 时对水体回波幅度影响要大,100~300 μm 气泡始终比20~30 μm气泡脉冲宽度要宽,大尺度气泡要比小尺度气泡更容易检测。
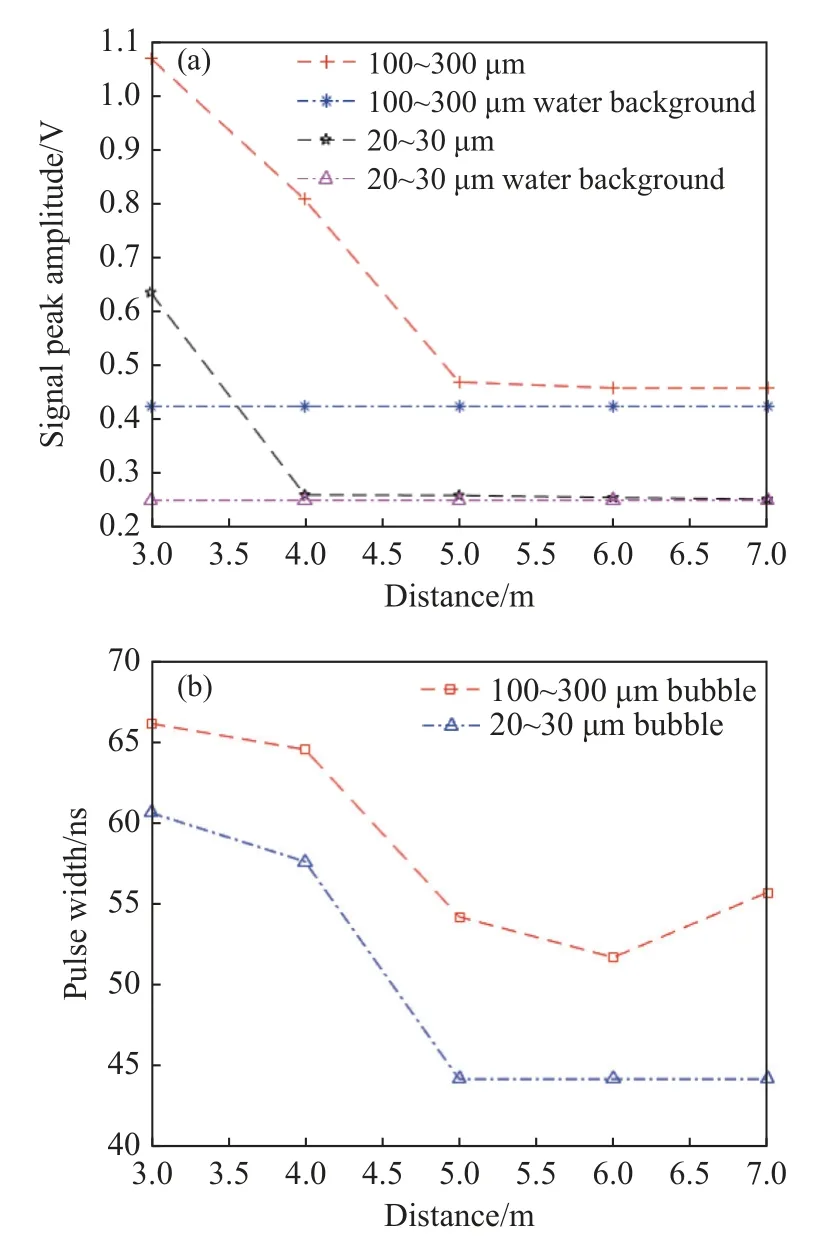
图12 不同距离下水体激光后向散射信号变化。(a)峰值幅度;(b)脉冲宽度Fig.12 Variation of laser backscattering signal of water body at different distances.(a) Signal peak amplitude;(b) pulse width
通过上述实验分析可得:100~300 μm 气泡在不同气泡数密度、不同气泡层厚度下始终存在气泡回波,且气泡数密度特性要比其他特性对舰船尾流探测的影响大;在5 m 以后对舰船尾流气泡探测灵敏度低;20~30 μm 气泡在不同气泡层厚度下始终存在气泡回波,且气泡层厚度特性要比其他特性对舰船尾流探测的影响大,在电流为0.2 A 时探测灵敏度低,在4 m 以后探测灵敏度低;大尺度气泡比小尺度气泡更容易检测。
5 结论
本文针对舰船尾流激光制导的应用背景,研究了不同距离、不同气泡尺度、不同气泡数密度、不同气泡厚度舰船尾流气泡的激光后向散射特性。得到以下结论:近距离的气泡要比远距离的气泡更容易检测;在气泡数密度为 102~108m-3,气泡层厚度大于0.05 m 时,大尺度和小尺度气泡始终存在回波信号,气泡层厚度小于0.05 m 时无回波信号,气泡层厚度特性对气泡后向散射影响最大;在气泡数密度为109m-3,气泡层厚度为0.05 m 以下时,大尺度气泡回波信号脉冲宽度会展宽,气泡数密度和尺度特性对气泡的后向散射的影响最大。搭建了水下典型气泡尺度下的激光后向散射测量系统,对气泡后向散射激光雷达回波信号进行了测试验证分析,得到了100~300 μm气泡在不同气泡数密度、气泡层厚度下始终存在气泡回波,且数密度特性要比其他特性对舰船尾流探测的影响大,在5 m 以后对舰船尾流气泡探测灵敏度低;20~30 μm 气泡在不同气泡层厚度下始终存在气泡回波,且气泡层厚度特性要比其他特性对舰船尾流探测的影响大,在电流为0.2 A时探测灵敏度低,在4 m 以后探测灵敏度低;大尺度气泡比小尺度气泡更容易检测。通过对舰船尾流气泡目标后向散射特性研究可提高舰船尾流探测信噪比及提高光尾流制导距离,增强舰船尾流气泡目标的检测能力。本文研究支撑了某水下探测系统的设计与工程实践。
