城市轨道交通双向牵引供电系统研究
2023-12-01李现鹏孟祥飞张文祥
李现鹏,孟祥飞,张文祥,万 卿,施 璇
(1.郑州地铁集团有限公司,河南 郑州 450000;2.海南金盘智能科技股份有限公司,海南 海口 570216)
0 引 言
随着城市轨道交通的迅猛发展,地铁、轻轨等线路日益增多,轨道交通直流牵引供电系统市场广阔。目前,城市轨道交通普遍采用基于12 脉波/24 脉波二极管整流机组的牵引供电方案,随着技术的进步,PWM 整流器也逐步应用于轨道交通直流牵引供电系统。作为轨道交通直流牵引供电系统的核心部件,AC/DC 变流器的性能指标决定了供电系统的性能指标,甚至关系到列车运行的可靠性。
文献[1-3]中对双向变流器主回路参数进行计算并对供电系统的需求进行分析,完成电路设计,为双向变流器运用到工程实际中提供了理论基础。文献[4-15]中介绍了多种双向变流器的控制方法,并对控制方法的优缺点进行详细分析,但在工程实际中需要面对更多复杂且不确定因素,控制方法需简单易实现。其中PWM 整流器并联控制的策略对PWM 整流器的多机并联运行有着重要意义。本文的双向牵引供电系统基于三电平拓扑结构下桥臂并联的主回路拓扑,提出基于电流PR 的控制策略,便于工程实现,显著提升了装置的输出电能质量,降低了装置绕组间的环流,通过Matlab 仿真和厂内试验验证了该算法的有效性。
1 双向牵引供电系统拓扑
在城市轨道交通中,传统的牵引供电系统主要通过两台12 脉波二极管整流机组并联的方式给直流牵引网供电,由于二极管整流器的单向供电特性,当列车制动时,再生回馈能量除了按一定比例被其他相邻列车吸收利用外,剩余部分再生回馈能量通过车辆或线路的吸收电阻以发热的方式消耗掉,牵引供电拓扑如图1所示。
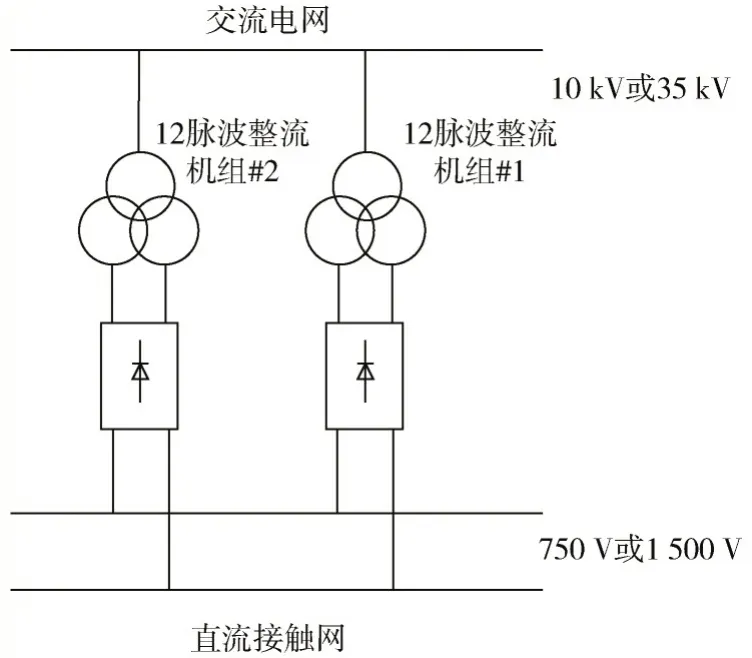
图1 传统的牵引供电示意图
本文研究的双向牵引供电系统主要由12 脉波整流机组和双向变流装置两部分构成。与传统的牵引供电系统相比,本文的双向牵引供电系统采用双向变流装置替代整流机组#2,双向变流装置与整流机组#1 通过并联的方式给直流牵引网供电。在降低能源消耗、降低运营成本及提高电能利用率方面有着显著优势,双向牵引供电系统拓扑如图2 所示。
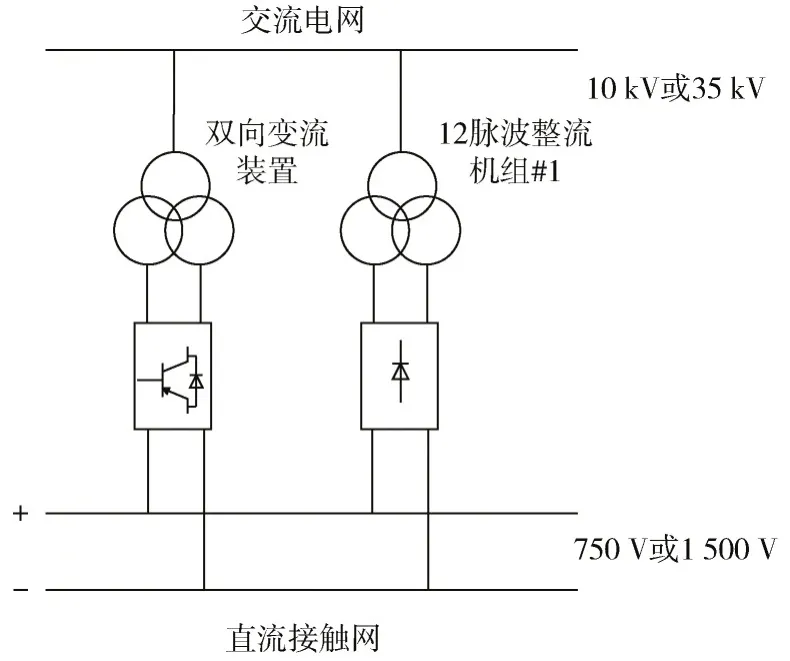
图2 双向牵引供电示意图
双向变流装置为电压源型PWM 四象限变流器,输出电压可控,当空载电压为Ud0时,其直流侧输出外特性如图3 所示。与整流机组相比,它既可以工作在整流状态,也可以工作在逆变状态。
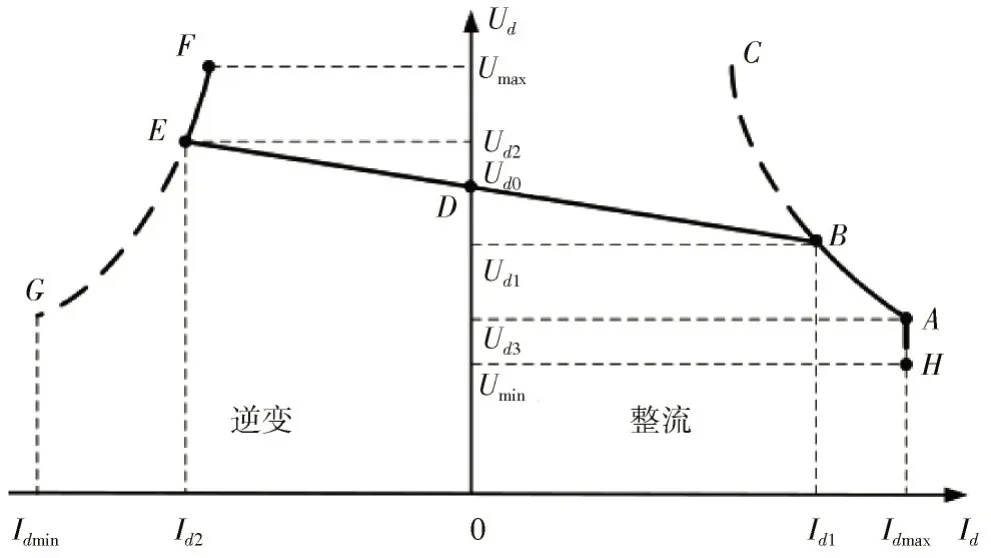
图3 输出外特性示意图
当列车启动时,双向变流装置工作在PWM 整流模式,通过模拟二极管的不可控整流特性,与整流机组一起协同实现对机车牵引供电;当列车制动时,双向变流装置工作在逆变回馈模式,迅速将直流侧能量逆变回馈至交流电网,维持直流牵引网电压的恒定。
2 双向变流装置主回路拓扑
随着国内城市轨道交通的快速发展,对轨道交通牵引供电系统的供电容量和电能质量提出了很高的要求。对于本文提及的双向牵引供电系统而言,有效提升双向变流装置的功率密度和电能质量的重要性不言而喻。
本文的双向变流装置采用基于三电平拓扑结构下桥臂并联的主回路,装置主要由4 部分构成:双分裂绕组变压器、低压开关柜、变流柜、直流隔离控制柜。与模块化拓扑的双向变流装置相比,本文基于桥臂并联的主回路拓扑,桥臂之间通过均流电抗器并联,并联桥臂间的IGBT 采用同步脉冲触发,均流电抗器可以有效抑制静态不均流、动态不均流及桥臂间环流。详细拓扑如图4 所示。
3 系统控制策略
由于整流机组固有的单向供电特性,对于双向牵引供电系统的控制策略研究,主要是基于对双向变流装置的控制研究,本文以双向变流装置PWM 整流模式为例进行阐述。
3.1 基于PI 控制的双环控制方案
双向变流装置工作在PWM 整流模式时,其主电路原理如图5 所示。其中:Rs为线路等效电阻;Ls为交流侧电感;C为直流电容;a、b、c为各相桥臂中点;o为交流电源中性点;idc为装置的直流电流;io为直流负载电流;ua、ub、uc为各桥臂中点a、b、c相对于电源中性点o的输出电压。
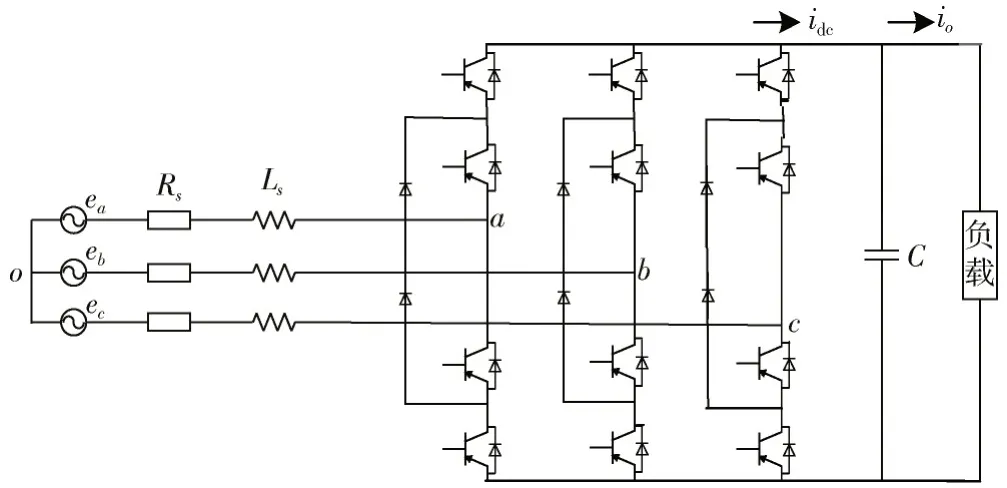
图5 主电路原理图
基于基尔霍夫电压定律,在静止abc坐标系下,建立PWM 整流器三相回路方程如下:
基于dq坐标系下,PWM 整流器三相回路方程如下:
基于dq坐标系下,PWM整流器输出控制电压方程如下:
结合式(3),可设计电流PI 调节器的方程如下:
综上所述,双向变流装置基于PI 控制的双环控制方案如图6 所示。外环为电压环,负责稳定输出电压;内环为电流环,负责提高装置的电流动态响应性能。图6 中:Ua、Ub、Uc为电网电压;Ia、Ib、Ic为装置输出电流;Udc_ref、Udc_fbk为直流母线电压的参考值和实际值。
传统的PI 控制器的传递函数为:
其在电网基波频率处的增益为:
由式(5)、式(6)可以看出,PI 控制器是一阶控制器,在电网基波频率处的增益是有限值,在跟踪正弦信号时会出现稳态误差,即跟踪电流给定值时会出现相位误差及幅值误差。
3.2 改进的基于电流PR 的控制方案
为了有效提升双向变流装置输出的电能质量,减小装置的输出环流及双向变流装置与整流机组并联运行时的功率分配问题,本文提出基于电流PR 的控制方案。
PR 控制器的传递函数为:
其在电网基波频率处的增益为:
从式(8)可以看出,PR 控制器传递函数在jω轴加入了2 个固定频率的开环极点,形成该频率下的谐振,使得PR 控制器在基波频率处的增益趋近于无穷大,可以实现对某一固定频率正弦指令信号的无静差跟踪控制。因此,与PI 控制器相比,PR 控制器具有更好的稳态性能和抗干扰性能,更适合于对逆变器并网电流的控制。
双向变流装置基于PR 的控制方案如图7 所示。控制策略上采用三环控制方案:外环为功率环,负责负荷功率分配;内环为电压、电流双环,负责稳定输出电压和提高装置的电流动态响应性能。图7 中:Ua、Ub、Uc为电网电压;Ia、Ib、Ic为装置输出电流;Udc_ref、Udc_fbk为直流母线电压的参考值和实际值;Pavg为双向牵引供电系统输出的平均功率。
双向变流装置通过采集电网电压、直流母线电压和装置的输出电流,电网电压经过双同步坐标锁相获取相位,对功率环、直压环和无功环的控制输出进行dq逆变换,获取相电流指令,对装置的输出电流和相电流指令直接在交流坐标系下进行PR 控制,电流跟踪精度高,控制器抗扰性强,便于工程实现。其中,功率外环相当于根据输出功率自动调节传统P-V下垂控制中的有功下垂系数,下垂控制表达式如下:
4 仿真搭建及验证
4.1 仿真部分
为了验证所提控制策略的有效性,本文对双向变流装置进行仿真验证。
试验参数设置如表1 所示,基于Matlab 平台搭建的仿真模型如图8 所示。
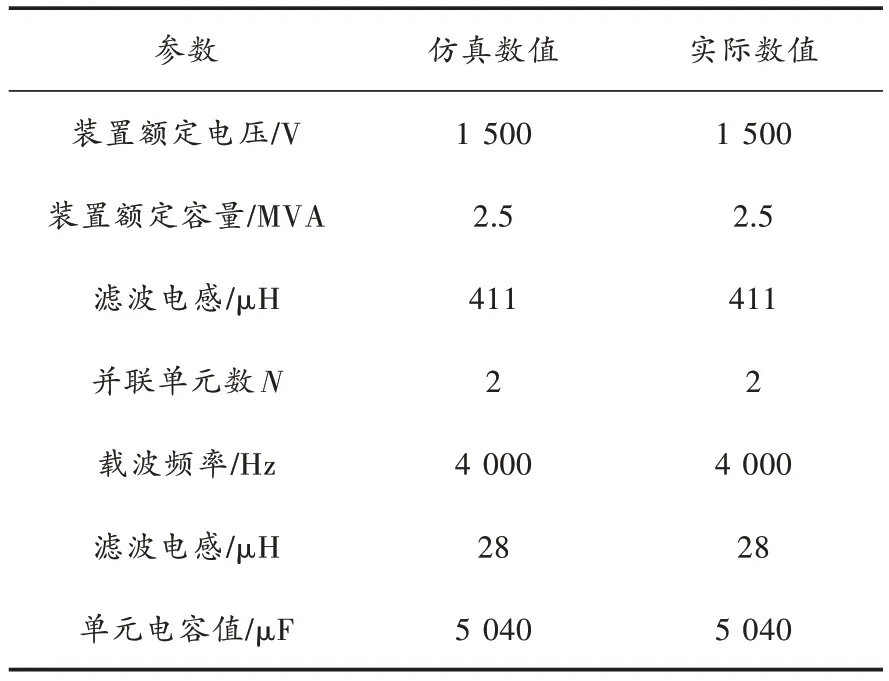
表1 仿真与试验参数

图8 仿真模型图
图9 为采用基于PI 控制装置的输出电流与指令电流。图10 为采用基于PR 控制装置的输出电流与指令电流。可以看出,采用基于PR 控制策略装置输出的电能质量显著提升。
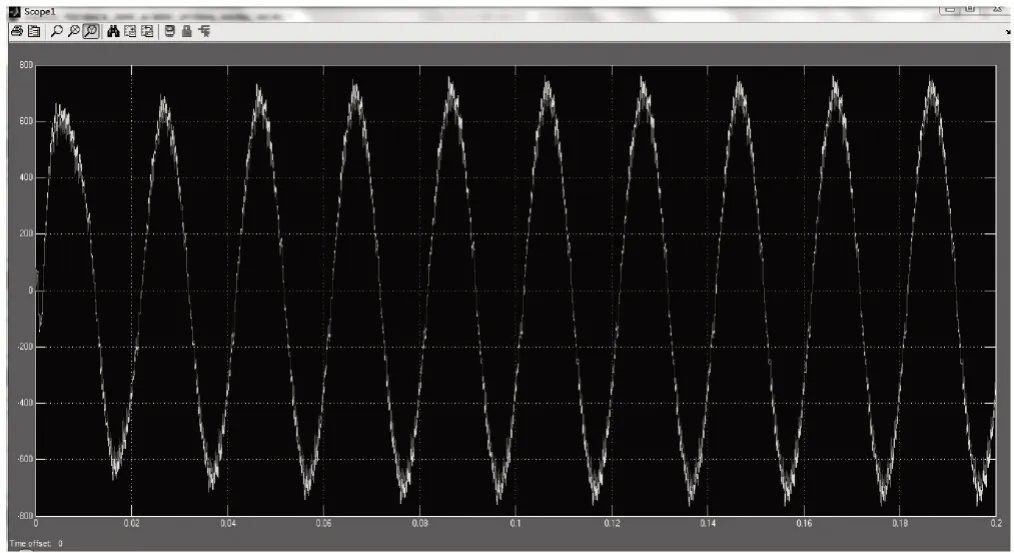
图9 装置输出电流与指令电流(基于PI 控制)

图10 装置输出电流与指令电流(基于PR 控制)
4.2 试验部分
为了验证双向变流装置的实际性能,在试验站搭建基于10 kV 能量内循环的整机试验平台,该试验平台主要由4 部分构成:10 kV 电源系统、双向牵引供电系统、机车变流器模拟装置、SVG 无功补偿装置,如图11 所示。图12 为双向变流装置实物图。
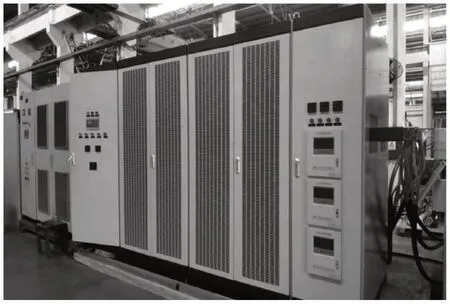
图12 双向变流装置实物图
搭建整机试验平台需要大量的变压器(感性无功),加之试验站总进线开关柜S1容量有限,高压SVG主要用于对线路无功进行补偿,确保试验正常开展。
双向变流装置与整流机组通过并联的方式给直流牵引网供电,机车变流模拟器用来模拟列车的实际运行工况(牵引、匀速运行、制动等)。当机车模拟装置模拟机车启动时,双向变流装置工作在PWM 整流模式,与整流机组一起协同实现对机车牵引供电;当机车模拟装置模拟机车制动时,双向变流装置工作在逆变回馈模式,迅速将直流侧能量逆变回馈至交流电网,维持直流牵引网电压的恒定。
图13 为采用基于PI 控制装置的输出电流,图14 采用基于PR 控制装置的输出电流,可以看出,采用基于PR 控制策略装置输出的电能质量显著提升。
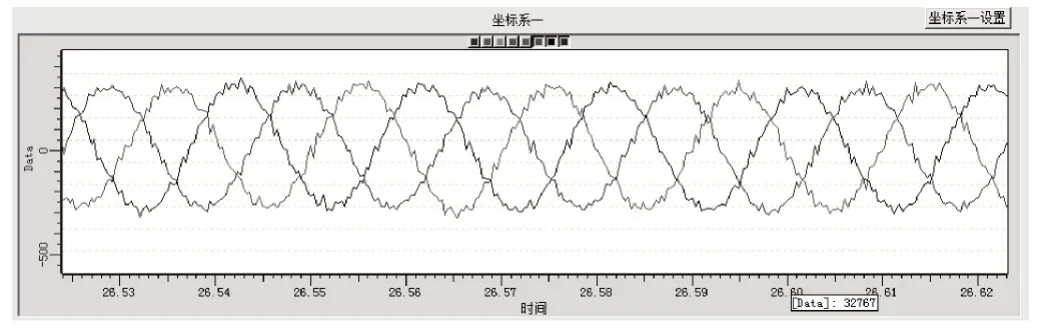
图13 双向变流装置输出电流(基于PI 控制)
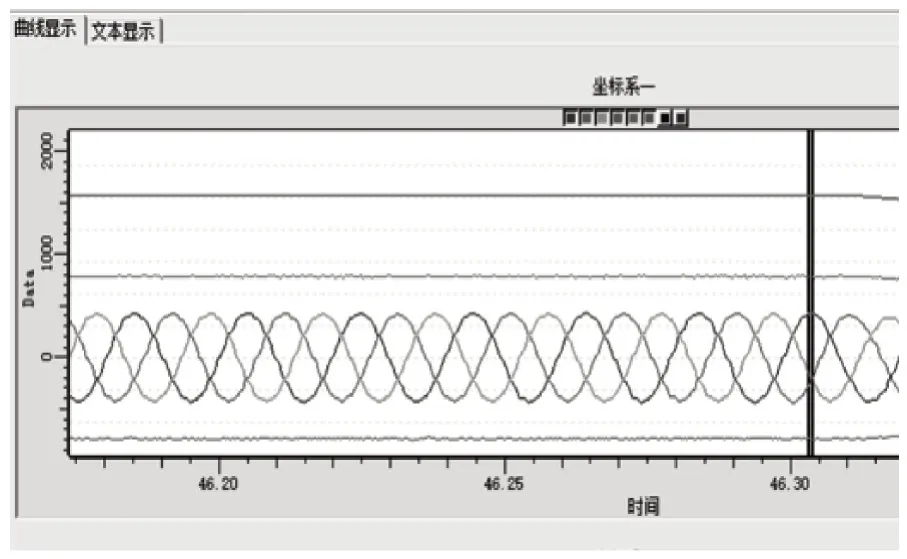
图14 双向变流装置输出电流(基于PR 控制)
5 结 论
本文对城市轨道交通新型双向牵引供电系统进行研究,基于提升双向变流装置输出的电能质量、减小装置的输出环流及双向变流装置与整流机组并联运行时的功率分配问题,提出基于电流PR 的控制方案,通过基于Matlab 平台的仿真建模和厂内整机试验,充分验证了该方法的有效性。
