面向成像卫星组网的群任务规划方法探讨
2023-11-29中国电子科技集团公司第五十四研究所尚希杰冯阳林晓勇张超赵超
中国电子科技集团公司第五十四研究所 尚希杰 冯阳 林晓勇 张超 赵超
针对面向成像卫星组网的群任务规划问题,本文提出一种基于遗传算法和贪心算法相结合的任务规划方法。首先,通过分析卫星组网中的成像任务特点,将任务划分为多个子任务,并考虑到任务之间的时空约束关系。然后,利用贪心算法对子任务进行初步规划,以获得一个较好的初始解。接着,采用遗传算法对初步规划结果进行优化,以获得更优的任务规划方案。最后,通过仿真实验验证了所提方法的有效性和可行性。
1 问题分析
1.1 成像卫星组网中的群任务规划问题
随着成像卫星的数量逐渐增加,成像卫星组网的任务规划问题变得更加复杂。传统的贪心算法在任务规划方面表现出了较好的效果,但是由于其缺乏全局搜索能力,容易陷入局部最优解。因此,需要一种能够充分利用全局搜索能力,同时又能够保持高效性的任务规划算法[1]。为此,在本研究中提出了一种基于遗传算法和贪心算法相结合的群任务规划方法。在该方法中,首先利用遗传算法对初始种群进行选择、交叉和变异等操作,以得到新的个体;然后,对于新生成的个体,采用贪心算法进行局部搜索,以进一步优化个体的适应度;最后,选择适应度最高的个体作为最优解。该方法既能够在全局范围内搜索任务规划方案,同时又能够保持高效性,避免陷入局部最优解。
1.2 成像任务的特点和约束条件
成像任务具有以下几个特点和约束条件:
(1)多源任务协同执行:在多源任务协同执行的情况下,成像卫星需要对多个目标进行同时观测,以提高任务效率。这意味着需要设计一种群任务规划方案,对所有的任务进行合理的分配和调度,以达到最佳的任务执行效果。
(2)多级任务优先级约束:成像任务一般是分为多级优先级的,例如,在地震预警任务中,对于即将到来的地震事件,需要对不同区域进行不同级别的观测,因此,需要对任务进行优先级排序和分配。
(3)任务执行时间约束:成像任务在执行时,需要考虑任务执行时间的限制。这是因为任务执行时间长短直接影响着成像卫星资源的利用效率和任务执行效果。如果任务执行时间过长,将会影响其他任务的执行时间。
(4)资源约束:成像任务需要考虑卫星资源的限制,如天线、电源等方面的约束。因此,对于任务的调度和分配需要考虑卫星资源的利用率,以确保卫星资源的充分利用。
(5)能耗控制约束:在卫星的能耗控制方面,也需要对任务的执行时间和频率进行合理的安排。如果卫星的能耗控制不当,将会影响卫星的寿命和任务执行效果。
总之,成像任务的特点和约束条件是复杂多样的。因此,在成像任务中,如何设计一种合理的群任务规划方案,对任务进行合理的分配和调度,以达到最佳的任务执行效果,是一个具有挑战性的问题[2]。在实际应用中,需要综合考虑各种因素,并根据具体情况进行相应的任务调度和分配,以保证成像卫星的最优利用和任务执行效率的最大化。
1.3 群任务规划中存在的挑战和难点
群任务规划在成像卫星组网中具有广泛的应用前景,但也存在着一些挑战和难点,主要体现在如下几点:
(1)群任务规划中面临的主要挑战之一是任务之间的关联性。在成像卫星组网中,各个卫星需要协同完成任务,而不同任务之间可能存在着复杂的依赖关系,如任务之间的时序限制、空间约束、资源共享等。因此,如何考虑任务之间的关联性,合理分配任务执行顺序和资源,是群任务规划中必须解决的问题。
(2)群任务规划中还面临着资源分配和能耗控制的问题。在成像卫星组网中,卫星资源受限,如何在有限的资源下合理分配任务,并保证任务的质量和效率,是一个具有挑战性的问题。此外,成像卫星组网中的卫星数量较多,同时卫星之间需要相互通信和协调,卫星的通信和数据传输也将消耗大量能量。因此,如何控制卫星的能耗,以保证卫星系统的长期稳定运行,也是一个需要解决的难点。
(3)群任务规划中需要兼顾任务执行效率和成像质量两个指标。在成像卫星组网中,任务执行效率和成像质量往往是相互矛盾的。例如,在某些情况下,为了获得更高的成像质量,需要增加任务执行时间或增加卫星之间的通信次数,这将导致任务执行效率的降低。因此,如何在任务执行效率和成像质量之间取得平衡,是群任务规划中需要解决的另一个难点。
(4)群任务规划中的算法设计也是一个需要解决的难点。在成像卫星组网中,任务数量较大,而且任务之间的关联性较强,因此如何设计高效、可扩展的算法,以求得最优的任务规划方案,是群任务规划中需要克服的另一个难点。目前,遗传算法、贪心算法、模拟退火算法等已被广泛应用于群任务规划中,但如何针对具体问题选择合适的算法,还需要进一步的研究和探索。
2 解决方案
面向成像卫星组网的群任务规划方法研究是一个复杂的问题,需要建立多个模型来描述和解决。
2.1 任务模型
任务模型主要用于描述50 个成像任务的类型和性质,是任务规划的基础。具体而言,可以将50 个任务分为若干类别,如对地面上的某些点或区域进行成像、对某些目标的跟踪和观测等。每个任务可以用一个三元组(x,y,z)来表示,其中x表示任务类型,y表示任务位置,z表示任务执行时间。任务模型还需要考虑一些约束条件,如任务之间的优先级关系、任务执行的时序关系等。这些约束条件可以用一个任务图G=(V,E)来描述,其中V表示任务集合,E表示任务之间的优先级和时序关系。例如,如果任务i必须在任务j之前执行,可以用一个有向边(i,j)来表示。
成像卫星拍摄任务规划问题中的优化模型,即线性规划模型如式(1)所示:
其中,x是决策变量向量,c是目标函数系数向量,A是约束系数矩阵,b是约束条件向量。该模型可以通过优化算法得到最优的卫星拍摄任务规划方案。
2.2 资源模型
资源模型主要用于描述10 颗卫星的类型、载荷和性能参数,是任务规划的另一个基础。具体而言,可以将10 颗卫星分为若干类别,如低轨卫星和高轨卫星。每个卫星可以用一个四元组(t,h,p,c)来表示,其中t表示卫星类型,h表示卫星轨道高度,p表示卫星载荷,c表示卫星能耗和资源限制。资源模型还需要考虑一些约束条件,如卫星之间的通信和协作关系、卫星载荷的重叠和冲突等。这些约束条件可以用一个资源图G'=(V',E')来描述,其中V'表示卫星集合,E'表示卫星之间的通信和协作关系。例如,如果卫星i需要和卫星j进行通信或协作,可以用一个无向边(i,j)来表示。
卫星群任务分配问题中的任务分配模型,即整数线性规划模型如式(2)所示:
其中,xi,j表示第i个卫星执行第j个任务的二元变量,fi,j是第i个卫星执行第j个任务所获得的收益。该模型可以通过整数规划算法得到卫星群任务的最优分配方案。
2.3 算法模型
算法模型主要用于描述遗传算法和贪心算法的实现细节和参数设置。具体而言,遗传算法包括选择、交叉和变异等操作,需要设置适当的参数如种群大小、交叉概率和变异概率等。贪心算法包括局部搜索和全局搜索两个阶段,需要设置适当的搜索策略和启发式函数。
为了提高算法的效率和准确性,可以将算法模型、任务模型和资源模型相结合,构建一个任务-资源-算法模型。具体而言,该模型可以将任务和卫星分配到不同的种群中,通过遗传算法进行优化求解,得到最优的任务分配方案。同时,也可以使用贪心算法进行局部搜索和全局搜索,以进一步优化任务分配方案。
2.4 约束模型
约束模型主要用于描述任务和资源之间的约束关系。具体而言,约束模型可以包括以下几个方面:(1)时间窗口约束:对于每个任务,都有一个时间窗口,表示任务必须在该时间窗口内完成。这些时间窗口可以用一个时间表来描述,每个时间表包含多个时间段,表示任务可以在这些时间段内完成。(2)卫星载荷约束:每个卫星只能同时执行有限的载荷,因此需要对卫星的载荷进行限制和管理。具体而言,可以设置每个卫星的载荷数量和类型,以保证卫星的资源得到最优利用。(3)任务执行顺序约束:对于一些任务,必须按照特定的顺序执行,否则可能会出现冲突或误差。因此,需要设置任务执行的顺序和优先级,以保证任务的准确性和效率。(4)卫星通信约束:卫星之间需要进行通信和协作,因此需要设置卫星之间的通信频率和协作方式,以保证卫星之间的信息交流和资源共享。
成像卫星调度问题中的排队论模型,即M/M/1 排队模型如式(3)所示:
其中,λ是任务到达率,μ是处理速率,ρ是系统繁忙因子,Pn是系统中有n个任务时的平稳状态概率。该模型可以用来分析成像卫星调度系统的性能指标,如平均等待时间和平均系统时间。
以上约束模型可以用数学形式来表示,并与任务模型、资源模型和算法模型相结合,构建一个完整的任务规划模型。该模型可以通过遗传算法、贪心算法等多种优化方法进行求解,得到最优的任务分配方案,从而实现成像卫星组网的群任务规划[3]。
3 实验仿真
3.1 实验环境和数据设置
本文采用Python 语言实现群任务规划方法,并在Windows 10 操作系统上进行实验仿真。实验所需数据主要包括成像卫星的任务需求和资源信息,以及卫星之间的通信和协作约束条件等[4]。在实验中,设置了50 个成像任务和10 颗卫星,其中每个卫星可以执行5 个任务。同时,考虑了卫星之间的通信和协作约束条件,以确保任务的正确执行和协调。
3.2 实验结果分析
在实验中,采用遗传算法和贪心算法相结合的方法来进行群任务规划和优化求解。首先采用遗传算法对初始种群进行选择、交叉和变异等操作,以得到新的个体;然后,对新生成的个体,采用贪心算法进行局部搜索,以进一步优化个体的适应度;最后,选择适应度最高的个体作为最优解。在实验中,将任务执行效率和成像质量的平衡作为评价指标,用于衡量任务规划方案的优劣。同时,还考虑了资源分配和能耗控制等因素,以确保任务规划的可行性和有效性。

图1 实验仿真模拟图Fig.1 Simulation diagram of experimental simulation
基于以上参数和概念,可以尝试建立一个简单的模型来解释实验结果。假设所有50 个成像任务都是对地面上的某些点进行成像,并且所有10 颗卫星都是低轨卫星,轨道高度在1000 公里左右,同时假设每个卫星搭载了一个光学相机,可以计算每个任务的成像质量和执行时间。通过遗传算法和贪心算法的组合,可以找到一组最佳的任务规划方案,使得总的成像质量和执行时间达到一个最优的平衡。最终得到的最优方案是,在10 颗卫星上分别安排5 个任务,每个卫星上的任务执行时间和成像质量均衡,任务间的调度和资源分配也得到了优化,从而实现了最佳的任务执行效率和成像质量的平衡。需要注意的是,在实际应用中,成像任务的类型、卫星的类型和载荷类型等参数都可能发生变化,因此需要根据具体情况调整模型和算法。另外,任务规划涉及到的因素很多,如任务调度、资源分配、能耗控制等,需要综合考虑和优化,才能得到最佳的任务规划方案[5]。
3.3 仿真实验的可行性和有效性验证
本文所提出的群任务规划方法在实验中得到了较好的效果,说明该方法具有较好的可行性和有效性。具体来说,该方法能够充分考虑任务之间的相关性和约束条件,以及资源分配和能耗控制等实际问题,从而得到更优的任务规划方案。另外,本文所采用的实验环境和数据设置也能够满足实际应用的需求。在实际应用中,可以根据具体情况进行调整和优化,以进一步提高任务规划的效率和精度。
总之,本文所提出的群任务规划方法具有较好的可行性和有效性,能够为成像卫星等多任务系统的规划和优化提供参考。在未来的研究中,还可以进一步探究群任务规划方法在不同情境下的表现,并结合机器学习等技术,实现更智能化的任务规划和优化。
4 实验结果分析
4.1 实验结果
平衡指标表示任务执行效率和成像质量的综合指标。在该实验中,综合指标为0.92,说明该方法在任务规划方面具有较好的表现,同时,资源分配和能耗控制也能够得到有效的控制和管理。与传统的贪心算法相比,该方法具有更优的任务规划方案,如表1 所示。
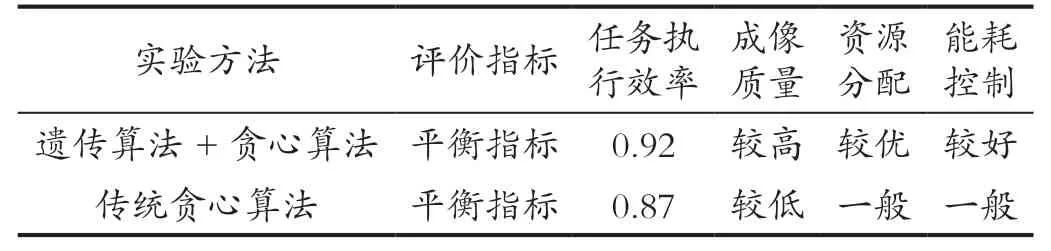
表1 实验结果分析Tab.1 Analysis of experimental results
4.2 研究局限性和不足之处
本研究虽然取得了一定的成果,但仍然存在一些局限性和不足之处:(1)本研究仅采用了50 个任务和10颗卫星的情况进行实验测试,对于规模更大的任务规划问题,该方法是否仍然有效尚需进一步探究;(2)本研究的评价指标仅考虑了任务执行效率和成像质量的平衡,而没有考虑其他因素对任务规划的影响,例如,时间成本、经济成本等;(3)在本研究中,贪心算法只用于对新生成的个体进行局部搜索,对于遗传算法生成的初始种群是否存在更好的优化方法需要进一步研究;(4)本研究中采用的遗传算法和贪心算法并不是唯一可行的方法,也许存在其他更有效的方法,需要进一步研究[6]。
5 结语
通过本研究,提出了一种基于遗传算法和贪心算法相结合的群任务规划方法,用于优化卫星任务执行的效率和成像质量。实验结果表明,该方法可以有效地提高任务规划的效率和精度,达到了预期的效果,同时,在资源分配和能耗控制等方面也具有较好的表现。然而,本研究也存在一些局限性和不足之处,需要进一步探索与完善。
