基于神经网络和马尔科夫模型的道岔故障诊断与预测研究
2023-11-27陈红霞孔筱筱
陈红霞,孔筱筱
(南京铁道职业技术学院,南京 210031)
截至2022年底,我国铁路营业里程已突破15.5 万km,其中高速铁路营业里程已达到4.2 万km。铁路线路的完好是保证行车安全的重要保障,道岔是铁路线路三大薄弱环节之一,如果道岔发生故障,维修不及时的话,可能导致严重的事故和较大的损失。因此针对道岔的研究以减少其发生故障是十分必要的。
目前,我国道岔故障状态的监测和状态信息采集主要是通过铁路信号集中监测系统,通过该系统掌握道岔的运行状态,并为分析道岔故障原因提供可靠依据。但在道岔发生故障时,缺少一个状态监测和故障诊断一体的综合监测软件,只能去现场确认查看,进而判断故障原因进行处理。这种维护方式随着高铁线路的不断增加,效率就显得很低。随着铁路的发展,必然需要采用新的理论和技术对道岔的故障预测进行探索。道岔故障预测即对道岔进行预防维修将是道岔故障分析的新方向,也是本论文的研究内容。
本文以S700K 电动转辙机为研究对象,实现道岔退化状态的识别、故障的预测。通过对道岔典型故障退化状态的挖掘和划分,进行道岔故障诊断及状态评估,实现道岔状故障预测的目的。
1 理论依据
S700K 型电动转辙机由电机、摩擦联结器、齿轮组、保持连接器、滚珠丝杠、动作杆、锁闭杆和速动开关组等组成。
1.1 动作过程
S700K 型电动转辙机与外锁闭装置配套使用,具有通过能力强、使用寿命长、安全可靠性高等优良性能,因而被广泛应用于我国的高速铁路线路。下面是S700K型电动转辙机实现道岔转换电路,主要包括启动电路、动作电路和表示电路。
以道岔向定位转换为例,首先由计算机联锁设备发出道岔从反位向定位转换的操纵指令后,YCJ↑和DCJ↑,1DQJ 的3-4 线圈励磁、1DQJF 随之励磁吸起,由1DQJF↑接通2DQJ 的转极电路。当2DQJ 转极后,1DQJ的自闭电路断开,通过1DQJ、1DQJF、2DQJ 的接点向室外送三相动作电源,BHJ 在1DQJ 的缓放时间内吸起,1DQJ 的1-2 线圈通过BHJ↑构成自闭电路。1DQJ 的缓放时间长度与3-4 线圈充磁的时间成正比。
图1中A 相-RD1-DBQ11-21-1DQJ11-12-电动机A 绕组、B 相-RD2-DBQ31-41-1DQJF11-12-2DQJ111-113-转辙机接点11-12-电动机C 绕组和C 相-RD3-DBQ51-61-1DQJF21-22-2DQJ121-123-转辙机接点13-14-遮断开关K-电动机B 绕组道岔从反位向定位转换时的动作电路图。表示电路由表示变压器、定位表示继电器、电阻和速动开关组组成。道岔转换到规定的位置后,BHJ↓,1DQJ↓,1DQJF↓,动作电源被切断,通过1DQJ↓接通其表示电路。
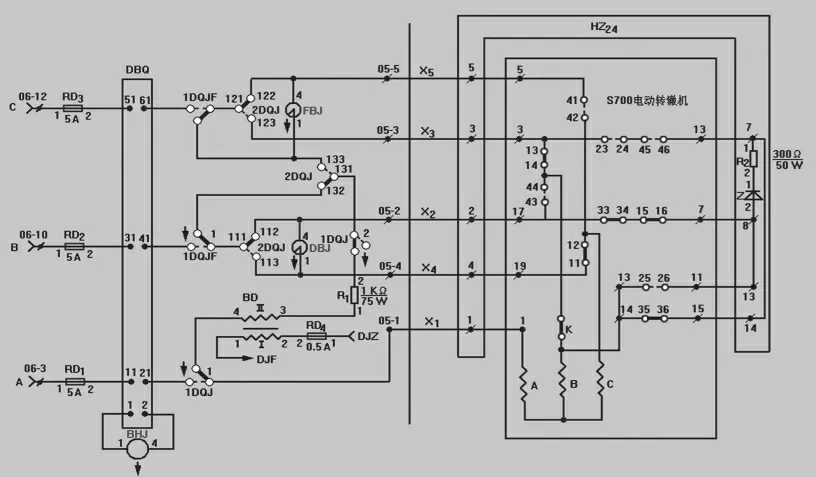
图1 动作电路图
1.2 S700K 电动转辙机常见故障分类及分析
道岔故障主要通过铁路信号集中监测系统调取查看道岔动作的功率曲线进行故障分析,然后根据道岔在转换过程中的阻力变化情况对道岔故障情况进行诊断。此外,由于电流曲线也能够较好反映道岔电路结构上出现的故障情况,铁路维护人员也将道岔电流数据作为辅助诊断依据,从而达到更全面的故障分析。图2 是某道岔在某次正常动作情况下的三相电流以及功率曲线。正常情况下,S700K 型电动转辙机完成一次完整的动作转换大概需要9 s,铁路信号集中监测采集系统的采样频率为40 ms,所以道岔一次正常动作时间内采集到的数据曲线大约包含230 个数据点。S700K 五线制道岔控制电路动作时序为1DQJ 吸起、1DQJF 吸起、2DQJ 转极、BHJ 吸起,三相电经断相保护器DBQ 送至室外转辙机电机线圈。要注意的是,1DQJ 有0.8 s 的缓放时间,期间是1DQJF 吸起、2DQJ 转极、BHJ 吸起的时间,0.8 s 后三相电送进来,沟通1DQJ 自闭电路。如果其中哪个环节没有完成,1DQJ 都将在0.8 s 后缓放落下。一般情况下,道岔转换过程中,一条完整的功率或电流曲线主要由启动解锁、转换、锁闭以及表示4 个部分组成。
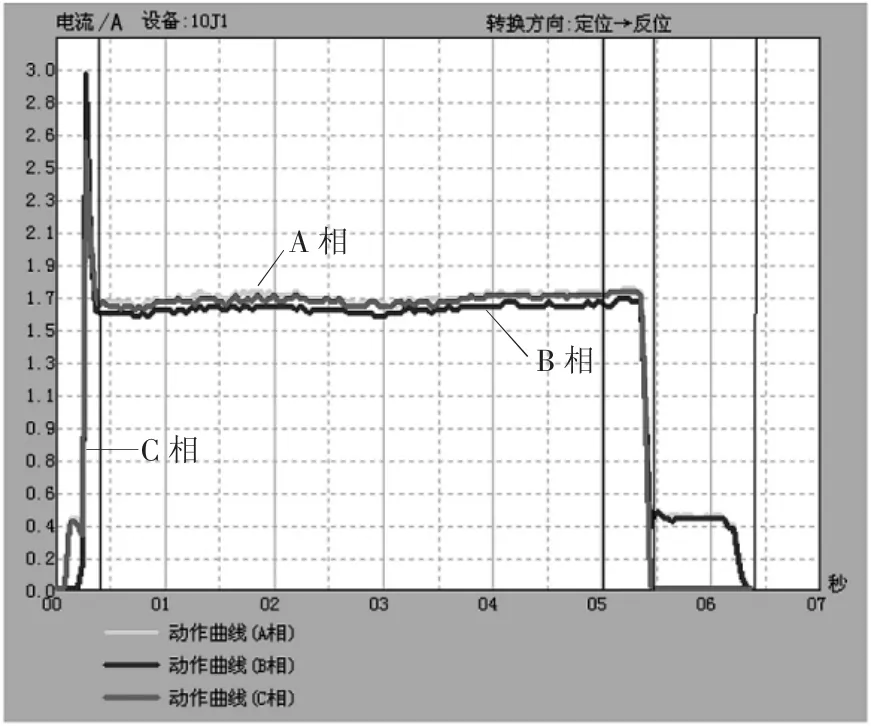
图2 正常情况下的标准动作曲线
道岔系统内部结构复杂,长期处于室外恶劣多变的环境中以及受到列车经过时带来的巨大冲击力影响,这些因素使得道岔成为了信号系统中最“脆弱”的设备之一。根据现场专家经验、相关文献查询,本论文对每种故障的类型和现象进行阐述,并对可能产生故障的原因进行了分析总结得到表1,这对于后续故障诊断和故障预测起着重要的作用。
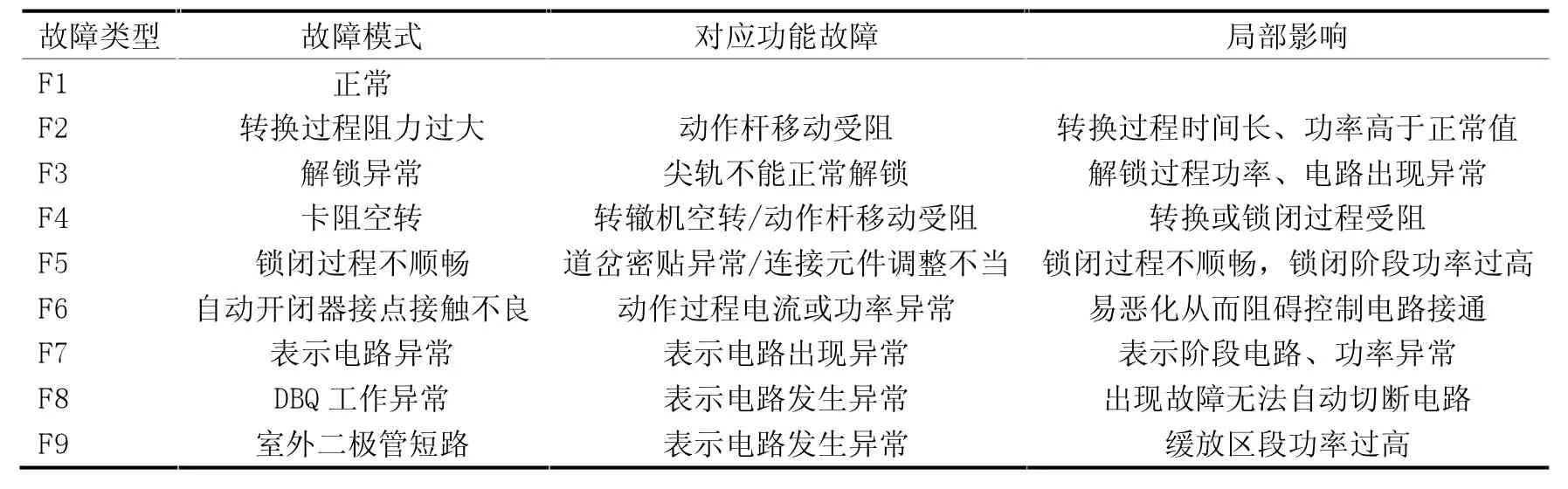
表1 道岔常见故障模式
以上几种故障模式根据其发生前是否具有明显征兆分为2 类:可预测故障和突发性故障。其中,可预测故障是指在道岔不断的往复运动过程中,在不考虑突发情况的前提下由于道岔机械性能的退化而引发的渐变性故障,例如由于转换过润滑减小程阻力过大没能及时维护引发的卡阻故障F4 属于机械性能下降导致的阻力增大引发的可预测故障。突发性故障由于发生无任何征兆,具有极强的随机性,无法进行故障预测研究。因此在本研究的故障预测研究工作中,将选取由于阻力逐渐增大导致的F4 故障进行研究。
2 分析过程和方法
退化状态是介于正常与故障之间的一种工作状态,该状态会随着时间的推移,最终的结果会演化成故障状态。尽管这种状态不是导致道岔故障的根本原因,但是是增加道岔故障的可能性原因,因此有必要对道岔的退化状态进行识别,通过识别其退化状态达到预防故障发生的目的。
2.1 基于Kohonen 网络的退化状态挖掘
Kohonen 网络的这种拓扑结构能对人脑神经细胞的特点和工作机理进行模拟。输入层模拟不同的刺激信号,输出层中的每个节点模拟为神经细胞。由于神经细胞兴奋的原因是接收到了信号的刺激,因此,当输入节点接收到样本数据的“刺激信号”后,将通过网络连接“传递”给输出节点。输出节点将对不同的输入表现出不同的“敏感性”,并通过侧向连接影响其邻接节点,最终“获胜”的输出节点将给出最大的输出值。图3 是Kohonen 神经网络学习算法程序流程。
由以上可知,道岔的一次工作曲线大约为9 s,铁路信号集中监测系统采集周期是40 ms,一般采集到的功率数据要比故障时的多,如果把所有的数据作为故障诊断模型的输入,这样会导致部分故障特征被忽略掉,同时还增加训练和测试的时间,影响诊断的效率和性能,所以要根据其特点,对这些数据进行特征提取,提取出典型的故障特征数据。
针对表1,结合Fisher 准则函数和LLE 2 种方法,筛选表征故障状态的特征量,并对特征进行降维处理,得出合适的特征输入,完成道岔转换过程中的功率数据的提取。针对道岔降维后的功率数据特征,采用Kohonen神经网络进行无监督学习聚类得出其退化状态选择流程图。

?
根据上述方法进行分析,得出6 种退化状态挖掘数据,见表2。
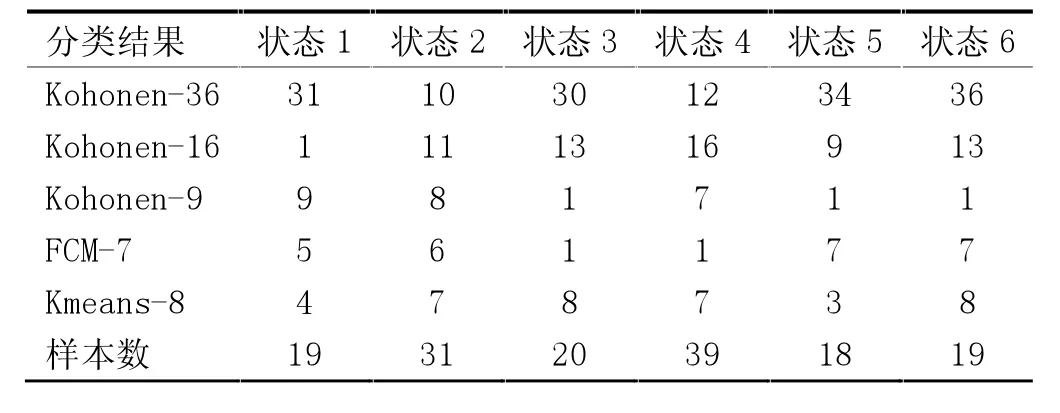
表2 退化状态挖掘结果
每种状态与正常动作功率曲线相比发现。状态1 的功率数据值普遍偏小,但是动作时间及功率值的波动性都和正常的道岔动作一致,该状态只能当做一类特殊的正常样本看待。状态2、状态3 及状态4 三种状态的功率曲线无论是解锁阶段,还是锁闭和缓放阶段功率表征与正常动作过程基本一致。可以推断出这3 种状态退化过程不断加重,并且和道岔转换过程阻力异常故障相关联。状态5 的功率数据在初始动作阶段较为正常,只是在动作阶段和锁闭阶段的结合部分,功率值异常波动。该状态没有形成有效的集中分布,所以不用于有效样本。状态6 的功率数据最大的特点是解锁功率值过低,而且锁闭时功率值有异常波动,和状态5 所表征的意义基本一致,所以也不用于有效样本。
2.2 隐马尔可夫(HMM)模型
以上得到了典型故障以及退化状态的功率样本数据,要找出典型退化状态与故障状态之间的联系,从而有效地识别道岔设备所处的健康状态。本论文利用隐马尔可夫模型在故障识别领域的优越性,结合上述数据处理结果,采用隐马尔可夫模型对道岔系统进行状态识别,即正常工作状态、退化状态和故障状态,为现场工作人员制定合理的道岔维护计划提供有力的帮助。
隐马尔可夫模型是一种在Markov 链的基础上发展起来的统计信号模型,能够利用收集的训练样本进行自适应学习,该方法非常适合类似于道岔这种复杂设备进行模式识别与故障诊断。
一个隐马尔可夫模型是不确定的、随机的有限状态自动机,由不可观测的状态转移过程和可观测的观察生成过程组成。它可分为离散型和连续型,本文利用离散HMM。离散HMM 是一个五元组
1)状态的集合S={S1,S2,…,SN}。记N个状态为θ1,…,θN,记t时刻马尔可夫链所处状态为qt,显然qt∈(θ1,…,θN)。
2)M:每个状态对应的可能的观察值数目。观测符号集合V={ν1,ν2,…,νM}。
3)T:观测符号序列的长度,观测符号序列O={O1,O2,…,OT}。记M个观察值为V1,…,VM,记t时刻观察到的观察值为ot,其中ot∈(V1,…,VM)。
4)π:初始状态概率π=(π1,…,πN),式中
5)A:状态转移概率矩阵,(aij)N×N,式中
6)B:观察值概率矩阵,bjk( )N×N,式中
基于HMM 的道岔状态评估系统由3 部分组成,分别为数据处理、矢量量化和状态评估。数据处理主要根据图2 和表2 的分析结果进行样本数据的特征提取、选择和降维,得到道岔状态的有效特征向量;然后根据隐马尔可夫模型进行处理和量化得出模型的输入,建立正常状态、故障状态、退化状态等模型,最后利用样本值验证隐马尔可夫模型的准确性,从而实现道岔设备故障诊断和故障预测。对道岔的健康状态进行评估。
根据以上分析,利用表2 中退化样本中3 种退化状态数据和阻力异常故障样本进行道岔设备故障诊断及健康状态的评估。将6 种不同维度输入的样本集合用于进行HMM 模型训练与验证。从结果上看,HMM 诊断识别率、准确度都比较高,所以在实际应用中,该方法比较合适。
3 故障预测与故障诊断平台设计
根据以上分析,设计道岔故障诊断与预测系统,系统结构如图4 所示。
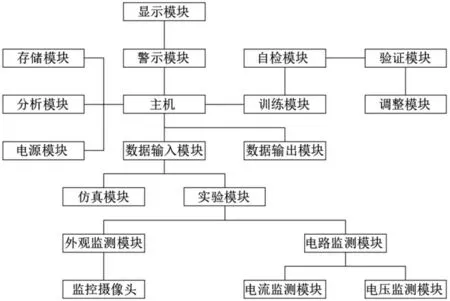
图4 故障预测和故障诊断系统结构
该系统包括主机,主机通过导线连接有电源模块,电源模块用于提供主机所需的电能,主机通过信号线连接有数据输入模块和数据输出模块,数据输入模块用于对外部监测得到的数据进行输入,数据输出模块用于对分析的结果进行输出,主机通过信号线连接有分析模块,分析模块对采集的数据进行分析,从而能够得出故障预测结果,主机通过信号线连接有存储模块,存储模块用于对输入的历史数据进行存储,数据输入模块通过信号线连接有实验模块,实验模块用于模拟道岔工作的实际情况从而输出各项参数以供分析,实验模块通过信号线连接有外观监测模块和电路监测模块,外观监测模块通过实际工作的外部状况对道岔的工作情况进行监测,电路监测模块通过对道岔转辙机工作的电路状况对道岔的工作情况进行监测,主机通过信号线连接有训练模块,训练模块通过对实验模块输入的各种数据结果进行分析,从而得出符合实际情况的函数模型,以便进行各种复杂状况的快速分析,主机通过信号线连接有警示模块,警示模块用于对故障预测进行警示。
4 结论
本论文以S700K 型电动道岔转辙机为研究对象,通过阐述道岔的转换原理,信号集中监测系统采集的功率曲线,分析了道岔的正常工作状态和故障状态,以及故障产生的原因。利用神经网络和马尔科夫建立故障诊断模型,根据故障模式的类型进行分类,并提出了故障识别的方法,建立道岔故障诊断和预测的系统平台,对于现场道岔设备的维护工作由很重要的指导意义和参考价值。
