基于V2X技术的智能导航杖设计与实现
2023-11-25张瑞超王琳
张瑞超,王琳
(山东管理学院,山东济南 250000)
0 引言
据世界卫生组织提供的数据,截至2020年全球有3850万失明人口,中国是世界上失明人口最多的国家,共有830万视力障碍者,占全球21.6%。近年来,中国视力障碍者人数呈现增长趋势,这主要与人口老龄化及不良生活方式等因素有关。对于视力障碍者而言,出行中的导航路径识别和引导一直是一个亟待解决的难题。目前,虽然市面上有供视力障碍者予以使用的手持电子导盲器,但在器件结构和技术限制上,其功能性的实现往往受到或多或少的限制,如定位不准确,只依赖声音或震动来定位距离或障碍物,无法应对突发状况或复杂环境等。随着近年来无线通信技术的快速发展,车辆通信技术的智能导航杖逐渐引起人们的重视,本文提出基于V2X技术的智能导航杖设计方案,通过利用V2X通信模块、GPS模块、惯性传感器等组件帮助视力障碍者提供行动支持上的导航功能,在运用V2X地图匹配算法中,通过与云端地图数据进行匹配,实现对视力障碍者的精准导航。
1 国内现状及引用场景
1.1 国内现状
1.1.1 视力障碍者出行现状
国内视力障碍者出行存在很多困难和挑战。以下是一些主要问题:
1)缺乏无障碍设施:很多城市中缺乏无障碍设施,如无障碍通道、盲道、无障碍电梯等,这给视力障碍者出行带来很大的困难。
2)交通不便:城市中的交通设施也存在很多问题,如公交车站、地铁站等不便于视力障碍者出行,导致视力障碍者在出行时需要花费更多的时间和精力。
3)噪音和人流干扰:视力障碍者在出行时需要依靠其他感官,如听觉、触觉等,但是城市中的噪音和人流等因素会干扰视力障碍者的感知,导致视力障碍者出行困难。
4)导盲杖使用率不高:虽然导盲杖是视力障碍者出行的重要辅助工具,但是在国内,很多视力障碍者并没有使用导盲杖。一方面是因为导盲杖的价格较高,一般需要几百元到几千元,对于一些经济困难的视力障碍者来说,难以承担;另一方面是因为导盲杖的使用需要一定的技能和训练,而很多视力障碍者并没有接受过相关的培训。
5)导盲犬使用不够普及:导盲犬是一种专门为视力障碍者服务的犬只,可以帮助视力障碍者出行、识别障碍物等。但是在国内,导盲犬的使用还不够普及,一方面是因为导盲犬的培训和购买成本较高,另一方面是因为一些公共场所对导盲犬的接纳程度不高,导致视力障碍者出行受到限制。
1.1.2 导盲杖现状
导盲杖是一种助行工具,主要用于辅助视力受损的人员在外出行走时进行障碍物识别和避障。目前,导盲杖的市场上有机械式导盲杖和电子式导盲杖两种类型。
机械式导盲杖通常是由铝合金材料制成,体积小,便于携带,使用时不需要电池支持,价格相对便宜,但功能单一,只能通过挥动导盲杖来探测障碍物。
电子式导盲杖采用声波探测技术,具有自动感应障碍物、语音提醒等功能,依靠电池供电。与机械式导盲杖相比,它的功能更加强大,适用范围更广。
虽然导盲杖在实际应用中有很大作用,但也存在一些问题,如识别准确度不高、使用复杂度较大等,需要进一步的研发和改进。因此本文为了提高精度和准确度,提出了将V2X 技术应用于导盲杖的设计思路。
1.2 导盲杖应用场景
导盲杖是一种专门为视力障碍者设计的辅助工具,常用于以下场景:
1)户外行走:导盲杖可以帮助视力障碍者识别地面障碍物、防止碰撞。
2)交通出行:导盲杖可以帮助视力障碍者辨识信号灯、提示行人通道,并有效避免因行走不慎遭受车辆撞击等危险。
3)购物逛街:导盲杖可以指示视力障碍者前方是否有货架或者其他障碍,并提醒其注意避让。
4)室内生活:导盲杖可以帮助视力障碍者掌握家中摆设、家具布局等信息,避免发生碰撞事故。
5)景点游览:导盲杖可以帮助视力障碍者辨认游览路线、提示景点位置,从而更好地参观旅游景区。
2 相关技术
2.1 V2X技术的可行性
V2X 技术[1]是指车联网中任何信息事物的通信,它是指车辆与车辆(V2V) 、车辆与基础设施之间(V21)、车辆与行人之间(V2P)、车辆与网络之间(V2N)的交通信息交换。所以当我们把V2X 技术应用植入到导盲杖的应用场景中时,就可实现视力障碍者同车辆、行人、基础设施、和网络间人机交互功能,最终为视力障碍者的出行安全和便利提供裨益。具体关系如图1所示。
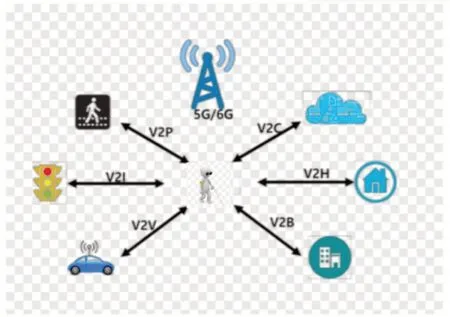
图1 V2X运用到拐杖中与其他设施的联系
当视力障碍者携带智能导盲杖通过路口时,V2X技术可以更精准且安全地帮助视力障碍者接收车辆和路边设施之间的通信,通过共同通信协议来减少可能出现的信号干扰及通信延迟问题,如交通信号灯的变化、车辆和行人的位置距离等。这些信息可以在短时间内快速传输到智能导盲杖中,让用户可以更实时、准确地了解自身所处的交通环境和地理方位,降低其与车辆的撞击风险。由此可见,结合V2X技术的智能导盲杖在实际使用中能够获取更多用户的。从而更加易于市场推广。
当然,在实际应用场景中,还需要考虑V2X 技术同智能导盲杖间的深度集成,如强对流天气影响、强信号干扰等问题,以便在充分的实验和测试中确保应用场景的兼容性和稳定性。
2.2 V2X技术应用于智能导盲杖
V2X 导盲杖采用车联网技术[2],通过与周围车辆和交通信号灯通信,为视障人士及视力薄弱者提供导航和安全提示,以避免在出行中的安全隐患。V2X导盲杖的主要功能原理如下:
2.2.1 车辆检测
V2X导盲杖利用传感器、通信技术和数据处理技术等多种技术手段,通过震动提示等方式实现对周围环境的实时监测,以帮助用户避免潜在危险。其主要设计原理如下:
1)传感器:V2X 车辆检测系统通常使用雷达、激光雷达、摄像头和超声波等传感器技术手段进行应用。当行人使用导盲杖经过马路时,V2X导盲杖将通过传感器自动采集数据,并帮助探测识别车辆的位置、速度、方向、距离和大小等环境信息。
2) V2X 通信技术:V2X 导盲杖可以利用Wi-Fi、LTE、5G 和DSRC 等通信技术,帮助用户建立通信渠道、实时接收有关车辆的行驶方向、车速、距离、道路地形等信息。
3)数据处理:V2X导盲杖在使用中可借助局域网解析传感器所收集到的数据,并将这些数据与预定义的规则和算法相结合以确定可能存在的危险,并发出警报指示。
2.2.2 信号灯识别
1)数据采集:V2X导盲杖中的内置摄像头可以采集行进过程中的交通信号灯图像,并将图像及时作为信号源,传输至场景使用中。
2)图像分析与处理:V2X导盲杖通过计算机视觉算法对采集到的图像进行分析和处理,包括将图像转换为灰度图像、边缘检测和形态学变换,从而提取出信号灯的特征,以确定信号灯的红、绿或黄色状态。
3)V2X 通信:一旦信号灯的状态被确定,V2X 导盲杖将使用V2V 或V2I 通信技术与周围的汽车或交通控制系统通信。当信号灯为红灯时,V2X导盲杖将发出警告声音或振动,以提醒视觉障碍者不要通过路口;当信号灯转为绿灯时,V2X 导盲杖将发出语音提示或震动,以指示视力障碍者可以通过路口。
2.2.3 导航指引
1)位置定位:利用GPS 定位、地磁定位或者Wi-Fi定位等技术精确定位用户所在的位置。
2)环境感知:通过车联网技术,实时获取周边环境信息,包括交通信号灯状态、道路状况、车辆行驶情况等,为用户提供准确的交通信息。
3)导航规划:根据用户语音输入的目的地和当前位置,采用距离最短、时间最短等算法规划最优路径,并根据实时交通情况进行动态调整。
4)声音提示:当用户即将行至路线中的关键路口或转弯处时,V2X导盲杖会通过声音提示及震动提醒用户,并指引用户正确方位。同时,会在一定距离内提前告知用户使用者所行进的方向变化和交通流量状况等信息。
2.2.4 网络连接
V2X 导盲杖融合了GPS、惯性导航等位置信息技术,与车载设备实时通信,在多源信息的基础上,精准传输周边环境信息,如障碍、楼房、地形等。
3 系统设计
本文设计的基于V2X 技术的智能导盲杖主要由传感器、通信模块、语音提示和震动反馈系统等组成。系统框图如图2所示。
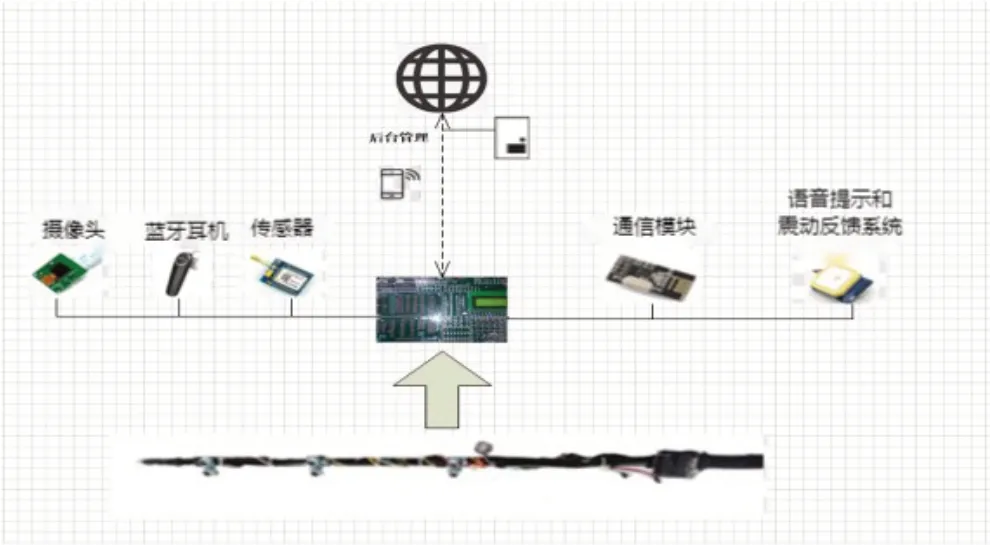
图2 系统框图
3.1 传感器
传感器是导盲杖的核心部件,用于检测视力障碍者周围的环境信息。本文采用了超声波传感器和红外传感器,分别用于检测前方障碍物和侧面障碍物。超声波传感器可以检测到距离导盲杖前方一定距离内的障碍物,红外传感器可以检测到导盲杖侧面的障碍物。传感器检测到障碍物后,会向控制器发送信号,触发语音提示和震动反馈系统。
3.2 通信模块
通信模块是导盲杖与车辆之间进行信息交互的关键部件。本文采用了车载通信模块[3],通过车联网技术,将车辆信息传输到导盲杖上。车辆信息包括车辆位置、速度、方向等,通过车载通信模块传输到导盲杖上后,可以帮助导盲杖识别交通信号灯、行人等信息,提供更加精确的导航和警示功能。
3.3 语音提示和震动反馈系统
语音提示【4】和震动反馈系统是导盲杖的输出部件,用于向视力障碍者传递信息。当传感器检测到障碍物时,语音提示和震动反馈系统会同时触发,向视力障碍者发出警示信号。语音提示系统采用了语音合成技术,可以将车辆信息转化为语音提示,例如“前方有车辆,请注意安全”。震动反馈系统采用了震动马达,可以向视力障碍者传递震动信号,提醒视力障碍者注意前方障碍物。
3.4 充电管理模块
V2X 导盲杖充电管理模块主要对导盲杖的电量进行监控和管理,提供电源不足时的警报和提示,以下是详细的分析。
1)充电方式:V2X导盲杖充电管理模块一般支持两种充电方式,分别是直接插电和先充电后使用。直接插电是将充电器插入导盲杖上进行充电,充满后即可使用;先充电后使用是将导盲杖插入充电器中充电,充满后取出使用。
2)充电保护:为了延长导盲杖电池的寿命,V2X导盲杖充电管理模块会对电池进行智能保护,例如过充保护、过放保护、过流保护等,以保证电池的安全性和可靠性。
3)充电状态提示:在导盲杖和充电器上会设置相应的充电状态指示音,用于提示充电状态,例如正在充电、充电完成等状态,方便用户知道当前的充电情况。
4 系统实现
本文采用了Arduino 开发板作为导盲杖的控制器,通过编写程序实现传感器数据的采集和处理,以及语音提示和震动反馈系统的控制。具体实现步骤如下:
4.1 硬件设计
本文采用了Arduino UNO开发板作为导盲杖的控制器,超声波传感器和红外传感器分别连接到开发板的数字引脚和模拟引脚上。车载通信模块采用了SIM808模块,通过串口连接到开发板上。语音提示系统采用了DFPlayer Mini模块,通过串口连接到开发板上。震动反馈系统采用了震动马达,通过数字引脚连接到开发板上。
超声波传感器:超声波传感器用于检测前方的障碍物。可以将其连接到开发板的数字引脚上。Arduino UNO 有几个数字引脚可用于接收传感器的信号,可以选择其中一个并在代码中相应地设置。
红外传感器:红外传感器可以用于侦测导航线或其他地面标记。类似超声波传感器,可以将红外传感器连接到开发板的模拟引脚上。选择一个合适的引脚,并在代码中进行配置。
车载通信模块:可以用于实现导航信息的传输和通信功能。将其连接到开发板上的串口引脚,通常是使用开发板上的TX和RX引脚连接。
语音提示系统(DFPlayerMini 模块):DFPlayerMini模块可以播放预先录制的音频文件,用于向用户提供语音提示。将其连接到开发板上的串口引脚,类似于车载通信模块的连接方式。
震动反馈系统(震动马达):将震动马达连接到开发板的数字引脚上。选择一个适当的数字引脚,并在代码中设置该引脚的输出。
4.2 软件设计
本文采用了Arduino IDE[5]作为开发工具,编写了相应的程序实现导盲杖的功能。程序主要分为传感器数据采集、车载通信、语音提示和震动反馈四个部分。程序流程图如图3所示。
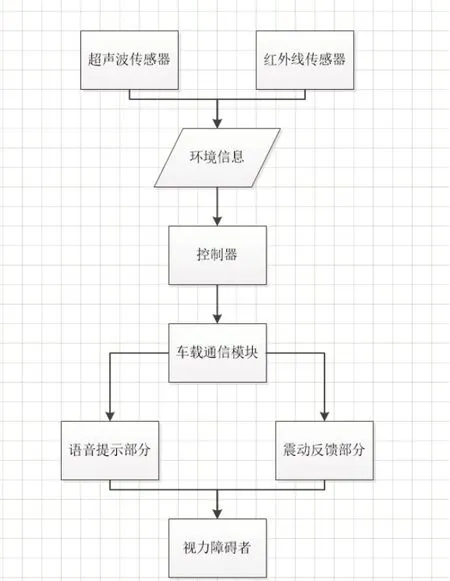
图3 程序流程图
传感器数据采集部分:通过超声波传感器和红外传感器采集视力障碍者周围的环境信息,将数据传输到控制器上。
车载通信部分:通过车载通信模块,将车辆信息传输到导盲杖上包括车辆位置、速度、方向等信息。
语音提示部分:通过语音合成技术,将车辆信息转化为语音提示,例如“前方有车辆,请注意安全”。
震动反馈部分:通过震动马达,向视力障碍者传递震动信号,提醒视力障碍者注意前方障碍物。
5 结束语
本文提出了一种基于V2X 技术的智能导盲杖方案,可以有效提高视力障碍者的出行安全和便利性,该方案采用传感器、通信模块、语音提示和震动反馈系统等组件实现。程序主要分为传感器数据采集、车载通信、语音提示和震动反馈四个部分,从而可以实现实时导航和路径规划。该智能导盲杖方案具有较高的导航准确率和实用性,可以为视力障碍者提供更加便捷的导航服务,为他们的日常出行带来更多的便捷和自主权。
