矿用提升机辅助智能监控系统的研发
2023-11-25李龙,程亮
李 龙,程 亮
(1.山西马堡煤业有限公司, 山西 长治 046000;2.太原科技大学, 山西 太原 030024)
在煤矿生产过程中,物料、人员、设备的输送要依靠提升机,提升机的可靠运行直接关系到工作人员的安全以及煤矿的经济效益[1]. 然而传统的提升机不能智能检测提升重物的重量、识别宽高是否超限。超限运输可能导致物体坠落、钢丝绳断裂甚至人员伤亡。目前所使用的检测物体长、宽、高的装置多为对射式光栅激光传感器和发射式激光传感器,这种传感器对于形状简单的物体检测精度较高,但对于形状复杂的物体检测精度则不足[2].同时,目前矿用防超闭锁装置多采用手动控制,效率较低。为此,通过AI视频识别和各种传感器感知技术设计了矿用提升机辅助监控系统,减少矿井在运输过程中的安全隐患。
1 主要原理与技术
1.1 激光雷达检测
激光扫描技术以激光测距原理为基础,通过棱镜旋转改变光束发射方向。依据激光检测仪发出激光束的往返时间可以计算出激光雷达与待检测物体间的距离,从而计算出物体的外形轮廓[3]. 具体运行过程如下:
1) 激光检测仪对没有物料的平板车底面各点扫描,得出激光检测仪和轨道平板车之间的高度,并记录下初始数据H0.
2) 扫描平板车上的物体各点,记录各扫描点扫描角度的扫描仪接收到反射信号的时间,示意图见图1.

图1 检测原理立体图
3) 完成对物体的扫描后,得到扫描序列。
由图1中表示的几何关系可知:
H=D×sina
(1)
式中: ɑ为扫描光束与物体某一扫描点之间的夹角;H为物体某一点至扫描仪的高度;D为物体的某一点与扫描仪的距离。
按照计算结果,得出一组物体上某点至扫描仪的高度序列(H1,H2,H3,H4…Hn). 根据设定好的初始高度H0减去当前高度,即为物体某点的高度,以此为依据,可得出一组物体扫描截面上各点高度,标记为(HJ1,HJ2,HJ3…HJn),关系表达式为:
(2)
该组数据需要进行有效判断,超过定值2.50 m 或低于定值0.05 m均为无效数据,检测时,去除无效数据,选择有效数据中最大值作为物体超限检测的最终高度值[4].
宽度检测原理与高度检测类似。
1.2 AI视频识别
人员误入监测的原理是在提升机巷道口安装摄像机,利用AI智能人体识别深度算法,实时监测识别人员与危险边界的距离。摄像机与控制柜相连,控制柜内置软件系统,具有智能分析人体和监测人体越界功能。当摄像机识别到人员与提升机巷口的距离发生变化且进入预设警戒线,并且在持续预定的时间不离开时,AI智能识别系统发出警告信息。
2 系统设计
2.1 软件设计
在控制箱中安装西门子S7-1200型PLC,选用西门子STEP7-V13编程软件进行PLC编程。系统工作流程示意图见图2.
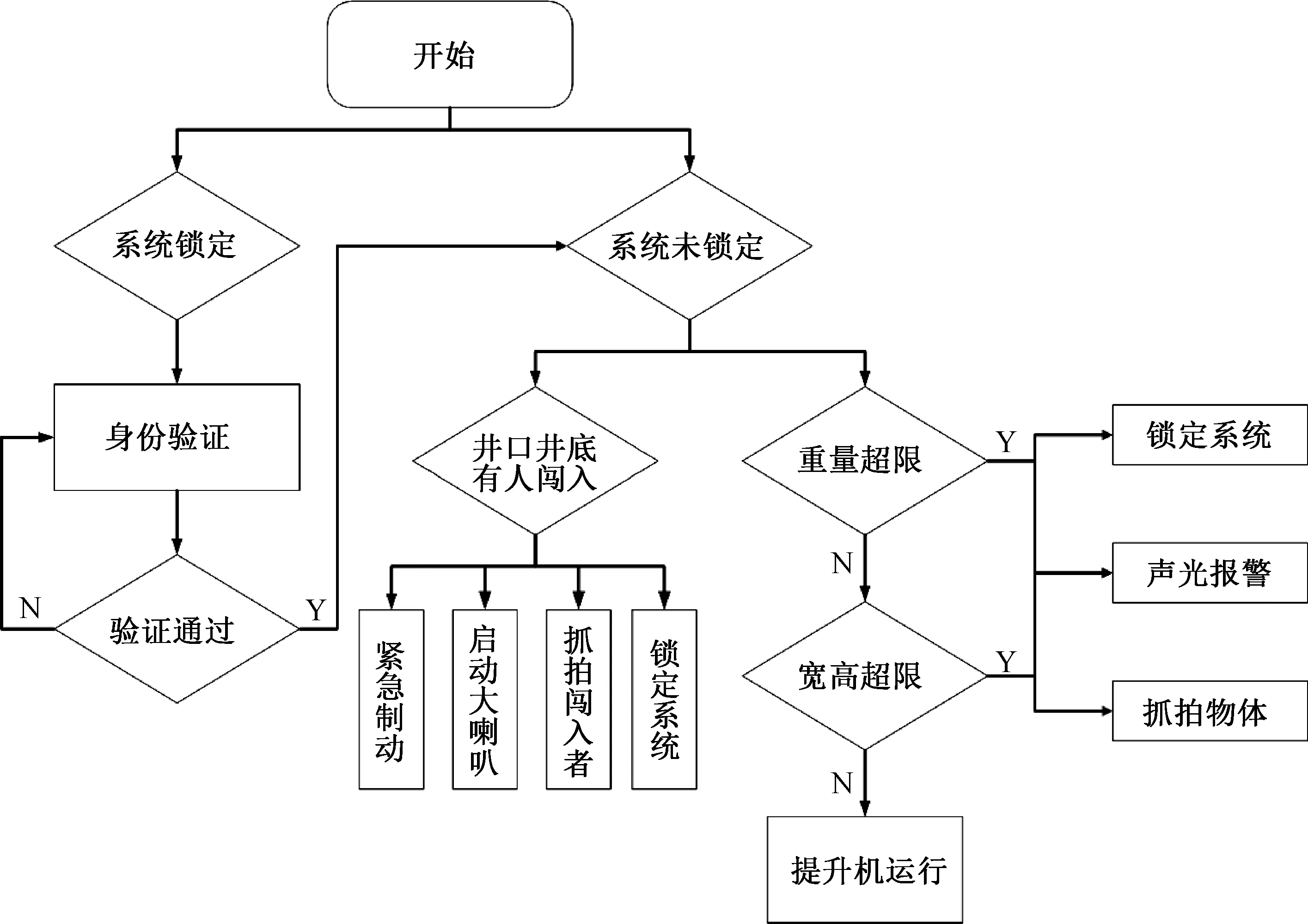
图2 系统工作流程图
该系统开始运行后判断系统是否锁定,如果锁定,需要专门人员在绞车房内的控制柜上进行操作,通过密码、人脸、IC卡、指纹识别之一验证成功后可解锁系统。解锁后摄像头对井口区域进行监控,如果识别到井口广场区域有人员闯入,控制柜将智能控制大喇叭发出警告声。激光雷达和称重传感器自动检测运输系统所运输物体的形状以及重量,并将所得的数据传输到就地控制柜中。显示器与控制柜连接,显示器上显示检测区域的动态图像和检测到的数据。控制系统将数据与设定值比较,如果物体在装车完毕后或者在运输过程中的宽、高和重量超过设定值,则通过控制电缆停止运输系统的运行并将系统锁定,通过摄像头抓拍超载物体,并控制声光报警器发出警报。
2.2 系统硬件结构设计
煤矿辅助运输智能监控系统包括上位机、控制柜、激光雷达、摄像头、称重传感器、显示屏、声光报警器等。系统示意图见图3.

图3 系统示意图
2.2.1 监控与控制
上位机位于绞车房内,主要功能是对监控视频进行显示,并储存数据备查。就地控制柜(带显示器)包括3个控制柜,分别安装在井口和井底把钩工区域和绞车房内,把钩工区域的控制柜内置软件系统,可对视频信号、称重传感器信号进行分析加工,依据相关算法智能进行物体超限判断,并负责闭锁打点信号和操作台显示以及收集检测数据并上传。绞车房内的控制柜控制绞车正反向运行和闭锁,并且配有门禁一体机,支持密码、人脸、IC卡和指纹识别。
2.2.2 检测装置
检测装置主要包括3类,分别采用了激光雷达、摄像头和轨道仿形称重传感器。
1) 激光雷达。激光雷达分别安装在井底、井口、运输巷道中检测区域。采用相控阵扫描式成像技术,通过发射激光的角度和激光从发射到返回的时间计算出扫描点的位置。通过多个电磁波相位不同可以产生干涉的原理来改变激光的方向,完成对物体的快速扫描,在运输物体移动的情况下精度也很高。同时激光雷达将各点的角度和距离信息传送至控制箱中,控制箱建立以雷达为原点的坐标系,将计算所得各点位置以坐标的形式储存,再对两个激光雷达扫描各点的坐标进行坐标系的变换后放在同一个坐标系上,对物体的宽度进行检测。
2) 红外摄像头。红外摄像头通过矿用煤安网线与就地控制柜(带显示器)连接,分别在井口和井底检测区域各安装1台,用于抓拍超重物体。另外在井口广场处安装摄像头,检测有无人员入侵并且监控井口区域。
3) 轨道仿形称重传感器。可测得运输物体的重量信息并传送至控制箱内进行处理。
2.2.3 报警
声光报警器安装在井口和井底把钩工区域以及运输巷道中,通过矿用煤安阻燃电缆与控制箱连接,在接收到控制箱的命令后开始运行,语音播放报警信息并且亮警报灯。同时在井口广场区域安装大喇叭,当检测到有人员入侵时播放报警音。
2.3 系统功能
该提升机辅助运输智能监控系统实现的智能监控功能主要有:
1) 检测运输物体的宽高,并智能判断是否超限。激光雷达-摄像头组成的测量系统,可以检测各种复杂形状的物体。
2) 检测运输物体的重量,并智能判断是否超重。轨道仿形称重传感器具有很高的检测精度和灵敏性。
3) 检测人员入侵。利用AI视频识别技术检测井口井底广场区域人员侵入,并且安装大喇叭,当检测到有人员入侵时播放报警音进行驱离。
4) 超限发生后锁定系统,并报警。当检测到超载或超宽、超高时,将系统锁定,若要解锁系统,需要专门人员在绞车房进行身份认证解锁。启动就地控制柜旁的声光报警器,语音播放报警信息并且亮警报灯。
5) 应急处置功能。若出现人员侵入等紧急情况,应急处置功能将立即采取措施,对提升机紧急制动,同时发出警报,确保系统的安全运行。
3 辅助运输智能监控系统在马堡煤业的应用
在山西马堡煤业有限公司的矿井运输巷道中,安装了该煤矿提升机辅助运输智能监控系统。由于激光雷达需要从上往下对物体进行扫描,因此激光雷达安装在运输轨道侧高2.5 m的专用安装铁架上,两个激光雷达对称安装于轨道两侧。红外摄像头分别安装在井口和井底检测区域,提升机巷道口处盖板焊接的铁支架上,距地面高度约2.5 m,角度为水平方向-30°,垂直方向向下-45°,不仅使得运输巷道全部处于监控有效区内,并且确保有误入人员进入提升机危险区域内才进行警报驱逐、停运机车等闭锁动作。仿形轨道状称重传感器分别安装在井口轨道和井底上坡前轨道处。声光报警安装在控制柜旁,方便操作人员感知。另外在井口广场区域安装防爆显示器,距地面2.5 m,用来显示物体信息。同时在井口广场区域安装大喇叭,当检测到有人员入侵时播放报警音。矿用辅助运输智能监控系统在山西马堡煤业有限公司的成功运用取得了良好的效果:
1) 通过传感器、摄像头以及雷达从多维度自动感知运输系统是否超载,提高了系统判断的准确性及运输系统的安全性。
2) 声光报警器具有语音播报功能,可以使操作人员清楚地听到超载信息,进而调整运输物体,提高工作效率。
3) 使用雷达检测物体宽、高,使系统能适应各类形状复杂的物体检测。
4) 使用触摸屏显示器进行人机交互,简单易上手并且使系统的运行状态更清晰地显示。
4 结 论
依托激光雷达检测、视频识别等技术设计了辅助煤矿运输智能监控系统,解决了煤矿提升机提升超重和宽高超限物体存在的潜在危险,并提高了物体的检测精度和工作人员的作业效率。该设备的推广使用,对保障煤矿工作人员安全和维护煤矿生产的正常进行具有重要意义,有利于煤矿智能化建设目标的实现。
