基于机器视觉传感器技术的玉米深松机械控制系统研究
2023-11-24陈洪莉
陈洪莉
(蒙城县农机化技术推广服务站,安徽 蒙城 233500)
0 引言
玉米是全球重要的粮食作物之一,是食品、饲料和工业加工的主要原材料,同时也是许多国家的主要农作物之一。然而,土壤疏松度和营养供应是影响玉米质量和产量的关键因素之一。玉米深松技术能够有效改善土壤结构、增加土壤肥力,提高土壤通气性和保水能力,进而实现玉米的提质增产[1-2]。
传统的玉米深松方法多为人工操作,效率低下且存在一定的安全隐患,限制了在实际生产中的应用。因此,开发一种能够实现自动化深松操作的机械控制系统,已成为当前玉米生产领域亟待解决的问题之一[3]。
为了提高玉米生产效率和玉米质量,本研究采用先进传感器技术,结合视觉识别技术与先进的算法,开发了一种玉米深松机械控制系统,系统通过对这些数据的实时处理,能够自动调节玉米深松机械的运动和深度,实现对玉米深松的自动化控制。研究成果能够为玉米生产提供一种高效、安全的深松方法与技术支撑。
1 视觉系统的图像处理技术
将连续图像转换为数字图像是计算机视觉领域的一个重要技术[4],图像被转换为数字形式,就可以对其进行预处理和分析,实现机器视觉方式对深松机的位置估计,可实时对深松机在图像中的位置进行估计和跟踪。
1.1 图像预处理
农田环境的复杂性可能会导致图像受到光照变化、设备抖动和噪声等因素的干扰,从而影响目标检测的精度[5-6]。本文使用高清摄像机采集的彩色图像,图像后期处理数据工作量大。为了提高图像处理效率,本文使用图像灰度化和降噪滤波进行图像处理。
1.1.1 图像灰度化
通过将原始彩色图像转换为灰度图像,可以减少存储空间和处理复杂度。灰度图像仅包含一个灰度值矩阵,其取值范围在0~255之间,代表了图像中像素的亮度。该转换是通过对原始RGB三个数据矩阵进行处理,将它们加权平均为一个灰度值来实现。
视觉呈现从黑过渡到灰再到白,类似于黑白照片,转换公式式(1)所示
Gray=0.299×R+0.587×G+0.114×B
(1)
1.1.2 降噪滤波处理
在灰度图像中进行降噪滤波可以消除由光照变化、抖动和设备噪声引起的图像中的干扰点,用于灰度图像的每个像素,以平滑图像并去除不需要的噪声。本文使用中值滤波进行图像降噪滤波处理。
中值滤波是一种常用的图像降噪滤波方法,中值滤波的基本原理是用像素点周围邻域内像素的中值来替代当前像素的值,可以有效去除图像中的噪声点,并在保持图像边缘信息的同时进行平滑处理。在中值滤波中,选择一个奇数长度的模板(也称为窗口、邻域)来处理图像。常见的选择是3×3和5×5的方形或者圆形模板,对于3×3的模板,将9个像素的值按升序或降序排列后,选择中间的第5个值作为中值(图1),然后将这个中值替换当前像素的值,将模板移动到下一个像素点,重复上述过程,直到对整个图像的每个像素点都进行处理为止。其数学表达式如式(2)所示
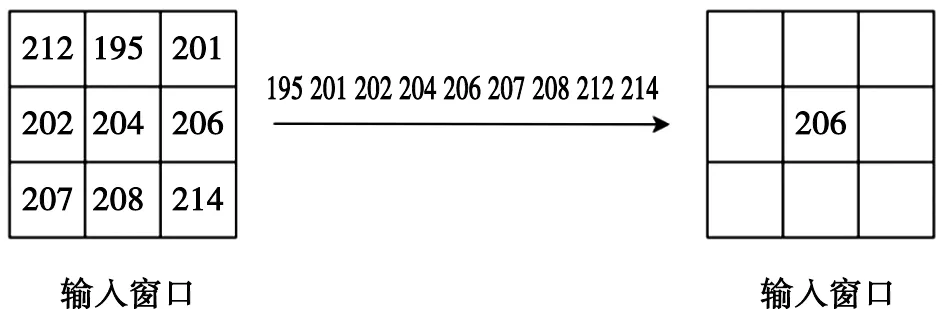
图1 中值滤波法处理示意图
g(i,j)=med{f(i-k,j-l),(k,l)∈O}
(2)
其中,g(i,j)、f(i,j)指滤波前后窗口中心像素点的灰度值;med指取中值函数;O是指窗口。
1.2 SIFT特征提取算法
SIFT(Scale-Invariant Feature Transform)是一种用于图像特征提取和匹配的经典算法,由David Lowe在1999年提出,能够提取具有尺度不变性和旋转不变性的特征点,适用于目标检测、图像拼接、三维重建等任务,因此,必须构建对应的尺度空间L(x,y,σ),从下部向上,尺度缩小,建立高斯金字塔。
2 机器视觉/GPS组合导航定位算法的研究
2.1 组合导航定位工作原理
本研究构建了基于机器视觉传感器和GPS的组合导航定位系统,主要工作流程图如图2所示。
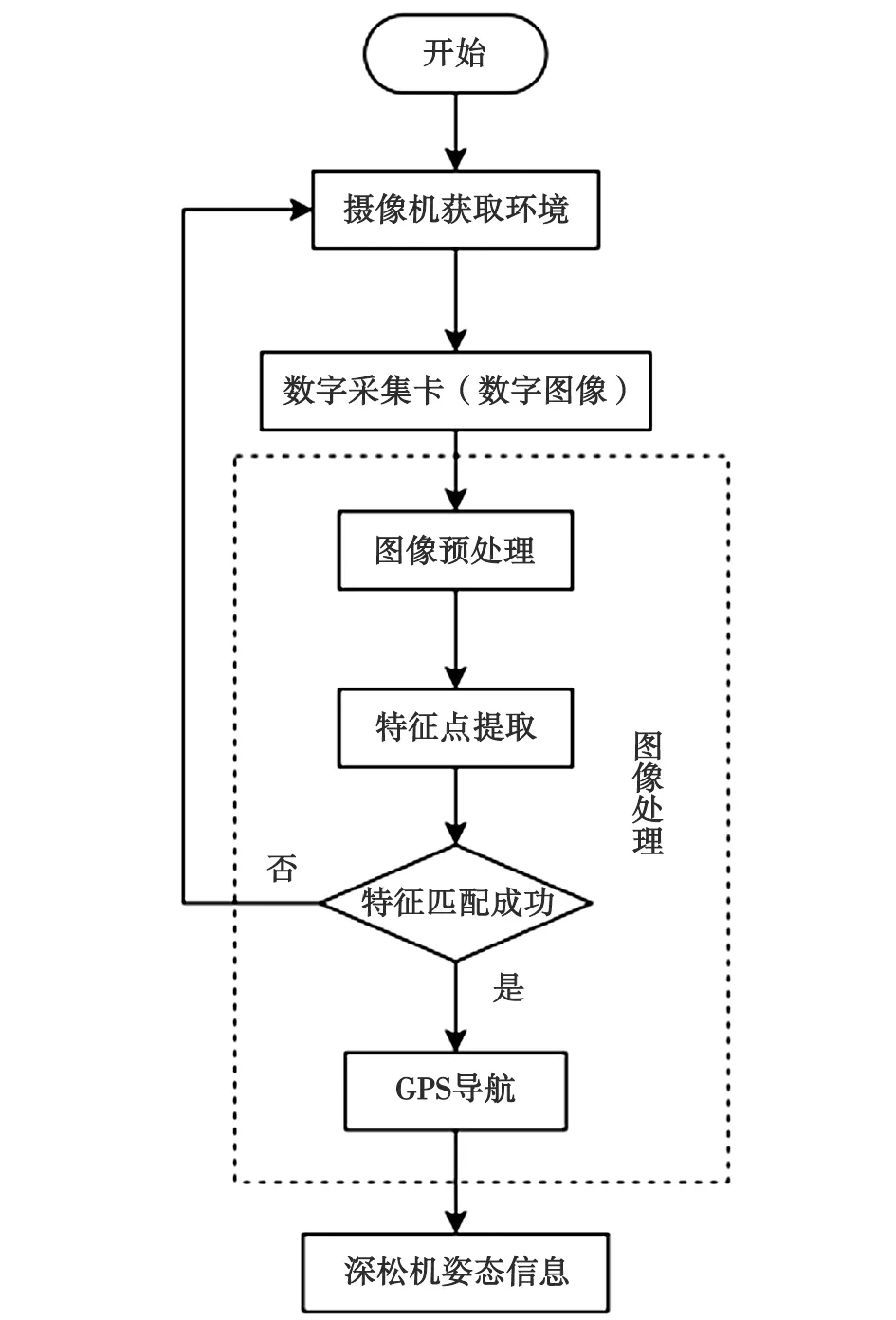
图2 组合导航定位工作流程示意图
1)图像采集。使用摄像机收集农田环境的图像。
2)数字图像处理。通过图像采集卡将图像转换为计算机可处理的数字图像格式,以便进行后续的图像处理和分析。
3)图像预处理。对数字图像进行预处理操作,灰度化将彩色图像转化为灰度图像,简化图像的处理和分析,同时,使用图像滤波去噪消除图像中的噪声点,提高后续特征提取的准确性。
4)特征点提取。使用SIFT算法对图像进行特征点提取。SIFT算法能够提取图像中具有尺度不变性和旋转不变性的稳定特征点,这些特征点可以用于后续的定位和匹配。
5)使用GPS定位系统中获取深松机的绝对位置坐标、航向角度和行驶速度。将获得的机器视觉和GPS定位信息转换到相同的坐标系中,并使用信息融合技术对两个数据进行融合,生成全新的定位信息。

+bk-cδtj(j≥4)
(3)
将式(3)j个方程组成一个方程组,最终可以得到4个未知数Xk,Yk,Zk,bk。
2.2 基于无迹卡尔曼滤波(UKF)的多传感器信息融合模型
在组合导航定位系统中,融合不同传感器的信息需要将其转换为相同的数据格式和坐标系,通过将各个传感器的数据转换为相同的数据格式,并使用适当的融合算法进行数据融合,可以最大程度地利用不同传感器的优势,提高导航定位系统的性能和精度[7-8]。本研究使用无迹卡尔曼滤波(UKF)的多传感器信息融合模型实现多传感器信息融合与转换(图3)。

图3 多传感器信息融合流程示意图
3 机器视觉/GPS 导航定位系统的设计
3.1 硬件系统
3.1.1 CCD相机
在视觉定位系统中,摄像机是一种用于采集图像的设备,通常安装在农机后端。摄像机的核心是图像传感器,它是一种感光器件,用于将光信号转换为电信号。在视觉定位系统中,常用的图像传感器主要分为两种类型:CCD和CMOS。在农田环境中,由于需要对复杂场景进行图像采集和处理,常常选择具有较高灵敏度和动态范围的传感器,以获取清晰、准确的图像信息,用于后续的视觉定位和导航应用。本文要求视觉导航系统采集高质量的图像,因此,图像采集完成的部分可选取 CCD 图像传感器的摄像机。
3.1.2 图像采集卡
图像采集卡是一种硬件设备,用于将模拟信号(如摄像机输出的模拟图像信号)转换为数字信号,以便计算机能够处理和存储图像数据。本研究选择Radient eV-CL作为本文图像采集卡,Radient eV-CL内置了硬件加速功能,可以在图像采集卡上进行实时的图像处理和算法运算,减轻了计算机的负担,可以方便地进行图像采集和图像处理应用的开发和集成。
3.2 数据采集类型
在深松机械中各种传感器和执行器被连接到Modbus总线上,通过Modbus协议实现与控制器之间的通信和数据交换(图4)。控制器通过发送不同功能码读取或写入对应的寄存器来获取所需的数据,从而实现对深松机械各个部件的实时数据采集和控制。通过Modbus协议,这些数据被实时传输到控制器中进行处理和分析,从而实现对深松机械作业过程的实时监测和控制。同时,控制器也可以向执行器发送相应的指令,控制深松机械的运动和工作状态,实现对深松作业的智能控制[9]。

图4 Modbus 协议通信过程
Modbus 数据类型如表1所示,其中位(Coils)类型是指只有两种状态(0或1)的数据类型,不同类型的Modbus数据类型和寄存器地址对应不同的数据位数和数据类型,应根据实际需求选择合适的数据类型进行数据采集和控制[10]。
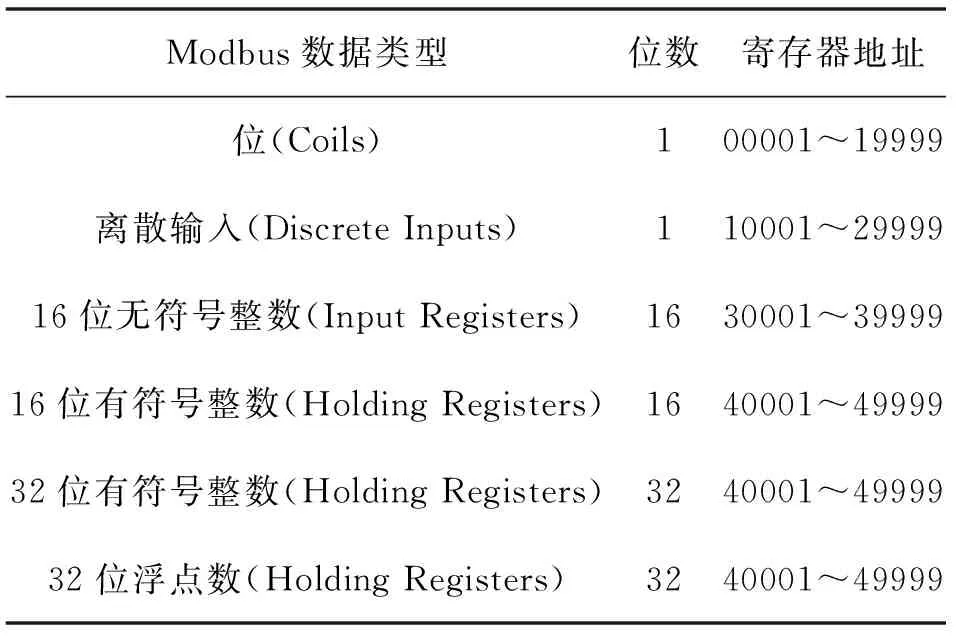
表1 Modbus 数据类型
4 系统性能测试和分析
4.1 试验设计
为了实现对玉米深松机械控制系统的性能测试,本文选择了一台玉米深松机械作为测试对象,在深松机械上搭载了数据采集单元和控制器,实现对深松机械的实时数据采集和控制。
4.2 测定指标与方法
1)响应时间。响应时间是指控制系统对深松机械控制指令的响应时间。测试方法为在控制器发送控制指令后,记录深松机械实际执行时间,计算出响应时间。
2)数据采集精度。数据采集精度是指数据采集单元采集到的数据与实际数据之间的误差,在深松机械运行时,使用测量工具对深松深度等指标进行实时测量,并与数据采集单元采集到的数据进行比较,得出数据采集精度。
4.3 结果与分析
响应时间试验结果如表2所示,研究结果表明深松机械控制系统的响应时间在0.5~0.7 s之间,响应速度较快,能够满足实际使用需求,但是田间试验过程中,实际执行时间存在一定的波动,主要是由于深松机械的负载和环境因素等原因造成的。因此,在实际使用中,需要根据具体情况对响应时间进行适当的调整和优化。

表2 响应时间试验结果 单位:cm
数据采集精度试验结果如表3所示,从表格中可以看出,数据采集精度误差在0.05%~0.33%之间,精度较高,说明系统采集的数据具有较高的准确性和可靠性,可以满足深松机械控制的要求。同时,实际数值也存在一定的误差,可能是由于传感器精度和环境条件等因素影响。在实际使用中,需要对采集的数据进行适当的校准和调整,以提高数据的准确性和可靠性。
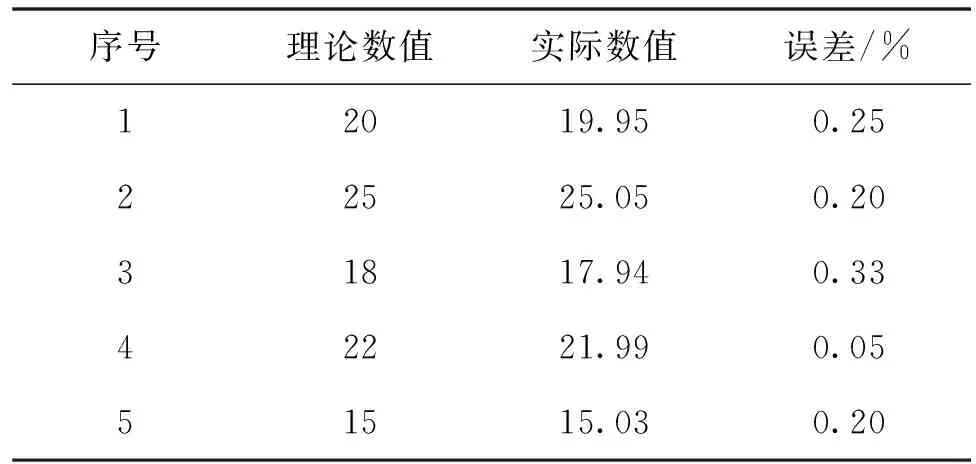
表3 数据采集精度试验结果
5 结论
在本研究中,采用了基于机器视觉和GPS的组合导航定位系统,并通过数据融合算法整合多传感器的测量信息,通过将视觉定位和GPS定位的数据进行单位换算和坐标调整,采用无迹卡尔曼滤波(UKF)的多传感器信息融合模型,实现了对两种数据的融合和目标状态的预估。试验结果表明,系统的响应时间较短,深度控制误差较小,数据采集精度较高。这说明系统在实现对深松机械的控制和数据采集方面具有很高的效率和准确性,能够满足实际生产和应用的需求。研究成果可以为农业生产提供一种先进的深松机械控制系统,同时,本研究也为其他类似控制系统的研究提供了一定的借鉴和参考。
