面向高速公路事故风险预测的深度学习方法
2023-11-22阮鸿柱黄小弟王金宝杜梦辉
阮鸿柱,黄小弟,王金宝,杜梦辉
(1.云南省综合交通发展中心,云南 昆明 650031;2.北京交通大学 计算机与信息技术学院,北京 100044)
0 引 言
交通事故对公共安全造成了严重威胁。如果能够提前准确预测高速公路的交通事故风险,管理部门可以更好地进行交通规划,减少交通事故,并发布交通事故风险警告,驾驶员可以选择更安全的路线,避免交通危险。
交通事故风险预测是指在观测到的历史交通事故基础上,预测目标位置在未来时间可能发生潜在交通事故的风险值[1]。除历史事故风险值之外,还可以分析导致事故发生的外部因素,如天气、时间、车流量等。早期的一些研究使用统计方法或线性机器学习模型,例如支持向量机[2],差分整合移动平均自回归模型[3]挖掘交通事故的历史发生模式。但是,这些方法难以捕获到交通事故数据中复杂且非线性的时空相关性。因此,一些研究基于深度学习方法,利用非线性模型提升交通事故风险预测的准确性[4-9]。
尽管现有的很多深度学习方法已被有效地应用于交通事故风险预测,但是仍存在以下两个挑战,从而影响了现有方法的预测精度。
第一个挑战是交通事故具有不均衡的空间分布[10],比如在交通量较大或者路段交汇情况较复杂的路段,交通事故数量可能较多,而一些路况较好的路段上交通事故数量可能较少。图卷积网络已被广泛应用于捕获路网中交通数据的空间相关性,但是传统的图卷积网络需要预定义邻接关系图以学习节点间的空间相关性。由于有限的先验知识,预定义图难以全面地反映空间相关性。一方面,由于不同的路段结构特征,相邻路段的事故分布差异可能较大;另一方面,相隔较远的路段,由于具有相似的拓扑连接关系,可能具有相似的事故分布。
第二个挑战在于交通事故在时间维的分布非常稀疏[11]。由于事故的偶发性,一些路段在大部分时间的事故风险值为零。由于缺乏事故风险样本,训练好深度神经网络具有较大的挑战。此外,由于非风险样本的数量远大于风险样本的数量,交通事故预测将偏向于输出零事故风险的结果,而不是发现潜在的事故风险。交通事故数量在时间维稀疏的问题,并没能被之前的工作很好地解决。
针对以上两个挑战,该文提出一种基于对比学习的自适应时空图卷积网络(Contrastive Learning Based Adaptive Spatio-Temporal Graph Convolutional Network,CASTGCN)用于交通事故风险预测。对于第一个挑战,基于矩阵分解的思想,该文使用自适应图卷积网络[12]以数据驱动的方式学习节点间的空间相关性,解决交通事故空间分布不均衡的问题。对于第二个挑战,该文设计了一种对比学习方法,该方法基于Mixup策略[13]生成足够多的事故风险样本。设计的Mixup策略利用事故数据中固有的周期模式,通过聚合两个相邻周的具有相同小时片的样本来实现数据增强,如果任一样本是风险样本,生成的样本将被标记为具有混合得分的风险样本,否则被标记为非风险样本。经过数据增强,非风险样本和风险样本的比例差将显著减小。然后利用风险和非风险样本构建正例和负例进行有监督的对比学习。通过对比学习使得模型更好地区分风险样本和非风险样本的嵌入表示,从而提升事故预测的准确度。
贡献总结为:首先,基于自适应图卷积网络以数据驱动的方式挖掘交通数据中复杂的空间相关性;其次,基于交通事故数据的周期性设计了一种Mixup策略并将其整合到对比学习方法中,解决事故数据在时间维稀疏的问题,使得模型可以更好地区分风险样本和非风险样本;最后,基于桂林市高速公路数据,将提出方法与多种预测方法进行对比,验证了提出方法的有效性和先进性。
1 前置定义
1.1 高速公路路网
将高速公路路网定义为一个无向图G=(L,E),其中L={l0,l1,…,lM}是|L|=M个路段的集合,E是|E|=Q条边的集合。如果车辆可以从路段li通向路段lj,则路段li和路段lj存在连接关系,(li,lj)表示连接路段li和路段lj的边。
1.2 交通事故风险
首先,根据交通事故的具体情况将其分为3种类型:轻型事故、中型事故、严重事故。对于第t个时间间隔中的一个路段,给定第k个类型的交通事故数量nk,该路段的风险指数(risk)定义为不同类别交通事故的加权求和:

(1)
其中,wk表示不同类型交通事故的权重:w1=1表示轻型事故,w2=2表示中型事故,w3=3表示严重事故。
1.3 图信号矩阵
在第t个时间间隔内,观测到高速公路路网G上的图信号用矩阵Xt=(xt,1,xt,2,…,xt,M)T∈RM×C表示,其中xt,i∈RC表示第t个时间间隔内路段lj的C个观测量的取值。
1.4 交通事故风险预测
在交通事故风险预测任务中,给定历史T个时间间隔的时空图信号矩阵χ=(X1,X2,…,XT),预测所有路段在第T+1个时间间隔的交通风险指数:
YT+1=Fθ(X1,X2,…,XT)
(2)
其中,θ为模型参数,YT+1∈RM为预测得到的所有路段的事故风险指数值。
2 方法介绍
该文提出一种基于对比学习的自适应时空图卷积网络(CASTGCN)用于交通事故风险预测,如图1所示。输入历史多个时间间隔的时空图信号矩阵,通过自适应空间相关性建模、自适应时间相关性建模、卷积层捕获时空图信号矩阵中的时空相关性,然后通过预测层得到各个路段在未来的交通风险指数,采用均方误差损失函数指导模型训练。另一方面,通过Mixup数据增广方法生成事故风险样本,通过自适应时空相关性建模得到风险样本和非风险样本的嵌入表示,利用增广样本的嵌入表示进行有监督的对比学习,使模型更好地区分风险样本和非风险样本。

图1 基于对比学习的自适应图卷积网络
2.1 输入层

2.2 自适应空间相关性建模
图卷积网络因其具有学习图结构数据中的空间相关性的能力被广泛用于交通流预测。目前普遍使用的图卷积计算公式如下:
(3)
其中,A∈RN×N为邻接矩阵,D为度矩阵,X∈RN×C为图信号输入,H∈RN×F为图卷积计算的输出,W∈RC×F和b∈RF为可学习参数。图卷积通过一组共享的参数W和b聚合节点自身和邻接节点信息,实现空间特征提取。
传统图卷积计算通常使用预定义的邻接矩阵A,邻接矩阵A通常基于距离计算得到。这种方法的局限性在于节点特征在图上的传播将完全依赖于预定义的图结构,而预定义的图结构难以保证其能完全包含路网交通数据中复杂的空间相关性。一方面,由于不同的路段结构特征,相邻路段的事故分布差异可能较大;另一方面,相隔较远的路段,由于具有相似的拓扑连接关系,可能具有相似的事故分布,如图2所示。
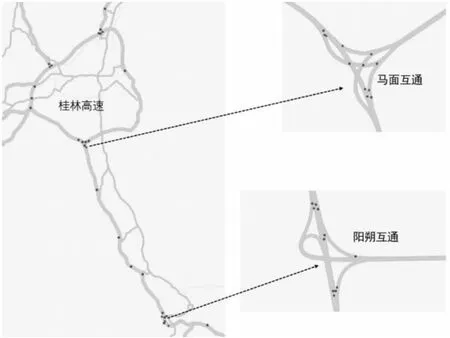
图2 桂林高速公路事故(圆点)的空间分布 (2022年3月5日8时至2022年3月12日8时)

(4)
自适应邻接矩阵不需要任何先验知识,在训练过程中通过反向传播机制学习自适应邻接矩阵的参数,以数据驱动的方式学习路网交通数据中的空间相关性。
(5)
其中Xt为第t个时间片下的图信号矩阵。
2.3 自适应时间相关性建模
在时间维度上,不同时间段的路网信息之间存在显著的相关性,在不同情况下的时间相关性也不同。因此基于注意机制[14]对历史不同时间步的交通数据赋予不同相关性。使用如下公式计算出时间注意力矩阵:
C=V·σ(((H)TU1)U2(U3H)+e)
(6)
(7)
其中,V,e∈RT×T,U1∈RN,U2∈RF×M,U3∈RF是可学习参数。时间相关性矩阵C的值根据输入的图信号矩阵自适应学习得到,其中元素Ci,j表示时间片i和j下路网信息的相关性。最后,使用Softmax函数对矩阵进行归一化。用计算得到时间注意力矩阵与空间相关性建模得到的嵌入表示相乘,得到新的时空图表示:
H'=HC'=(HS-T+1,HS-T+2,…,HS)
(8)

H'(r)=ReLU(Φ*H'(r-1))∈RFr×M×Tr
(9)
其中,*表示标准卷积计算,Φ为时间维卷积核参数,Fr表示第r步卷积后图节点的特征维度,Tr表示第r步卷积后时间维度大小。最终输出为:
Z=ReLU(Φ*H'(R))∈RFout×M
(10)
在得到聚合前T个时间段时空相关性的路段嵌入表示Z后,通过一个多层感知机作为预测器,得到所有路段在第T+1个时间段的交通风险指数YT+1=MLP(Z)。
2.4 基于Mixup的数据增广
传统的对比学习方法[15]通过对样本进行数据增强得到正样本对和负样本对,然后利用正、负样本对计算对比损失以实现表示学习。表示学习的目的是使正样本对在嵌入空间中的差异性更小,负样本对在嵌入空间中的差异性更大,从而使得模型更好地区分正样本对和负样本对。尽管传统的对比学习方法在很多领域广泛应用,但是,由于交通事故数据的稀疏性(如图3所示),引入对比学习难以直接使模型更好地区分事故风险样本和非事故风险样本。相比于大量的非事故风险样本,少量的事故风险样本使得模型难以学习到事故风险数据的分布,从而难以调整模型参数实现事故风险的预测。

(a)严关塘堡互通-溶江至溶江-灵川西路段

(b)桂林东-尧山至尧山-灵川路段图3 桂林高速公路事故数量随时间的分布(2021年11月20日0时至2022年6月1日0时)
为减轻因事故风险样本稀疏带来的影响,该文基于Mixup数据增广方法生成足够多的事故风险样本。通过对交通事故的时空分析可知,其发生时间具有以周为单位的周期性,即不同周的相同周中天发生交通事故的概率相比于不同周中天发生交通事故的概率更接近。基于这种周期性,通过构造两个连续周具有相同时间戳样本xi和xj的凸组合生成增广样本:
Xmix={λxi+(1-λ)xj|ti-tj=7天}
(11)
Ymix={λyi+(1-λ)yj|ti-tj=7天}
(12)
其中,λ为混合参数,用于调节两个数据源的影响。如果xi或xj为事故风险样本,则将生成的增广样本标记为事故风险样本。
2.5 对比学习方法
在实现基于Mixup的数据增广后,通过对比学习方法利用增广后的数据解决事故风险数据在时间维度稀疏的问题。
首先,根据数据增广后的风险值对生成的事故风险/非风险样本进行分组,得到正例集合和负例集合。具体的,风险值大于0的样本构成正例集合,风险值等于0的样本构成负例集合。
然后,将正例集合和负例集合输入由自适应空间相关性建模和自适应时间相关性建模构成的编码器f(·),通过映射函数g(·)得到增广样本的嵌入表示Zpos和Zneg:
Zpos={g(f(xi))|xi∈Xmix,yi>0}
(13)
Zneg={g(f(xi))|xi∈Xmix,yi=0}
(14)
最后,利用增广样本的嵌入表示在潜在空间进行有监督的对比学习,使得模型更好地区分事故风险样本和非事故风险样本。受益于基于Mixup的数据增广,更多的事故风险样本的特征可以被模型充分利用,从而防止对比学习在非事故风险样本上发生过拟合,通过学习到更好的事故风险嵌入表示实现更准确的交通事故风险预测。
在交通事故风险预测中,对比损失的目的是使得事故风险样本的嵌入表示构成的正样本的相似度更高,非事故风险样本的嵌入表示构成的负样本对的相似度更低:
(15)
其中,sim(·)表示余弦相似度。
2.6 损失函数
训练过程中,损失函数包括通过原始数据计算的事故风险预测损失LF和增广数据计算的对比损失LC。LF由预测值和真实值的均方误差计算得到:
(16)

总的损失函数L为两项损失函数的组合,参数α控制对比学习的影响:
L=LF+αLC
(17)
2.7 模型训练
模型训练的损失函数使用均方误差函数,优化算法选用Adam算法[16],Adam算法是一种基于“动量”思想的随机梯度下降算法,在迭代前计算梯度的二阶动量并计算滑动平均值,并用于更新参数。
3 实验与结果
实验使用桂林市路网区域的交通数据,共有36个路段,从2019年11月20日到2022年6月1日。按6∶2∶2的比例划分训练集、验证集和测试集,使用训练集的均值和标准差对所有数据进行归一化,输入T=10个时间步的数据,预测未来1个时间步的交通事故风险指数。
3.1 评价指标
从回归和排序两方面验证提出的模型的预测性能。该文用平均绝对误差(Mean Absolute Error,MAE)从回归的角度评价预测准确率。通过Recall和MAP以排序的角度评测事故风险区域的预测准确度。在时间间隔t(1≤t≤T),如果在kt个路段存在事故风险,Recall表示真实具有事故风险的kt个路段与预测得到事故风险值最高的kt个路段的重合率。MAP表示预测路段的平均准确率。MAE越低,表示模型预测的交通事故风险指数越准确,Recall和MAP越高则表示模型识别事故风险的能力越强。MAE,Recall,MAP的计算公式为:

(18)
(19)
(20)

3.2 基线模型
将提出模型(CASTGCN)与其他6种现有可用于交通事故风险指数预测的模型进行了对比。
MLP[17]:多层感知机,通过设置隐藏层捕获高阶函数关系。
LSTM[18]:一种经典的循环神经网络模型,广泛用于处理序列数据。
SVM[19]:一种基于交通流稳定性系数和支持向量机的交通风险预测方法。
ISTGCN[11]:一种使用改进的时空图卷积网络预测交通风险的方法。
ASTGCN[20]:一种用于交通指数预测的基于注意力的时空图卷积模型,其在时间和空间为都应用了集合注意力机制的卷积操作。
AGCRN[12]:一种应用了自适应图卷积和循环神经网络的交通风险预测模型。
3.3 实验与环境设置
文中模型基于Pytorch框架实现,自适应图神经网络的节点嵌入维度为32,图卷积、时间注意力卷积、隐藏层大小均设置为32,对比损失权重α设置为0.2,混合参数λ设置为0.1。时间注意力卷积模块在时间维度堆叠了3层卷积得到最终预测结果。模型训练采用了Adam优化算法,初始学习率为0.000 1,训练批次大小为128。实验使用Python 3.6编写,Pytorch框架版本1.10.2,硬件配置如表1所示。

表1 实验硬件配置
3.4 实验结果分析
按上述使用不同的方法在相同场景下进行预测,结果如表2所示。

表2 不同方法在数据集上的实验结果比较
从表2可以看出,文中模型在3种评价指标中均达到了最佳性能。其中,MLP是经典深度学习结构,可以用于几乎所有预测任务,但由于其结构单一,在预测事故风险时缺少相应的模块建模路网信息的时空相关性,导致效果并不理想。SVM基于交通流稳定性系数为输入,并且不需要搜索最优参数,效果优于MLP,但这种方法将各个路段的特征及风险当作独立的样本,无法建模路网信息的时空相关性,因此预测能力有限。
LSTM有能力捕获时间序列上长短期依赖,但是其难以捕获空间维度上路网信息的相关性,其效果仍然有限。ISTGCN,ASTGCN和AGCRN作为时空数据预测模型,都集成了空间和时间两个维度的处理模块。然而,ISTGCN和ASTGCN都基于预定义的邻接矩阵捕获特征的空间属性,其效果稍弱于使用了自适应图卷积的AGCRN,因为基于预定义的图难以建模路网信息中完整的空间相关性。该文基于Mixup策略设计数据增广方法,使用对比学习解决事故数据在时间维稀疏的问题,获得了更好的事故风险样本的嵌入表示。此外,该文将自适应图学习和注意力机制结合,以数据驱动的方式挖掘交通数据中复杂的时空相关性,从而实现了最佳效果。
3.5 消融实验分析
为进一步分析模型各个组件的作用,设计了原模型的3个变体进行消融实验,将这3个变体与原模型进行比较。变体的描述如下:
wo_S:在原CASTGCN基础上,不使用自适应图卷积建模路网信息的空间相关性;
wo_T:在CASTGCN基础上,不使用时间注意力机制建模路网信息的时间相关性;
wo_Cta:在CASTGCN基础上,不使用对比学习方法,将对比损失权重α设置为0。
消融实验的结果如表3所示。

表3 消融实验结果
首先,在不建模路网信息的空间相关性的情况下(wo _S),模型在各项指标上都有所降低,由于具有相似拓扑连接关系,相似流量等交通量变化情况路段间的事故风险存在相关性,因此该文通过自适应图卷积捕获路网信息的空间相关性是有效的。此外,在不建模路网信息的时间相关性的情况下(wo _T),模型表现显著降低,因此该文基于注意力机制自适应地学习路网信息的时间相关性对于准确地事故风险预测是有效的。最后,在不使用对比损失的情况下(wo _Cta),模型效果有所降低,这说明基于Mixup策略的数据增广缓解了事故数量稀疏的影响,引入对比损失可以使模型更好地区分风险样本和非风险样本,因此实现了更准确的事故风险预测。
4 结束语
为更准确地预测高速公路的事故风险,该文提出了一种基于自适应时空相关性建模和对比学习的深度学习模型。使用自适应图卷积网络捕获路网信息的空间相关性,解决基于预定义图的图卷积运算难以包含路网信息完整空间相关性的问题。此外,基于注意力机制自适应建模路网信息的时间相关性,然后通过卷积层进一步聚合相邻时间片间的信息。接着,基于Mixup策略实现数据增广,解决交通事故在时间维度分布稀疏的问题,并利用对比学习方法使模型更好地区分风险样本和非风险样本,以实现更准确的事故风险预测。最后,通过实验证明了提出方法的有效性和先进性。今后将进一步挖掘高速公路静态特征数据,比如是否存在弯道、匝道、下坡等,以更全面地建模影响高速公路事故风险的因素。
