日本鹿岛港船舶靠离泊操纵介绍
2023-11-22赵浩杰李成海
◎ 赵浩杰 李成海
1.青岛市海洋发展局;2.山东交通职业学院
1.码头介绍
鹿岛港位于本州东部茨城县东南鹿岛海滩岸,临太平洋。港口完全由陆岸内人工挖出,外有南北防波堤保护入港航道,船舶由东北方入港。港内水域呈“T”字型,中央港池北岸和北港池东岸原料码头有3个16~19米泊位,码头线836米;成品码头5个泊位,水深12米,码头线1076米。北港池西码头有2个5万吨级泊位,水深13米。中央港池南岸是公用码头,水深10米,可靠泊1.5万吨级船舶;电解厂码头水深16米,可靠泊10万吨级船舶;西段的原油码头水深14.5~16米,可靠泊大型油船。在南港池东岸南段有化肥码头,水深9米,可靠泊万吨级船舶。
2.潮流介绍
鹿岛港面向太平洋,并受日本洋流的影响,该港属亚热带季风气候,夏季盛行东南风,冬季多西北风,冬夏温差达到最小,一年四季都是温和的海洋性气候。年平均气温10~27℃,全年平均降雨量1000毫米。属半日潮港,大潮升1.3米,小潮升1.1米。
3.航行方法
从锚地起锚进港,航法如下:
A0(35°58’.8N 140°43’.0E)航向026°~206°,航程0.9nmile
A1(35°58’.0N 140°42’.5E)航向003°~183°,航程2.1nmile
A2(35°55’.94N 140°42’.36E)航向056°~236°,航程1.7nmile
A3(35°54’.98N 140°40’.62E)航向134°~314°,航程0.6nmile
A4(35°55’.3N 140°40’.2E)
船舶航行操纵方法:当船舶靠码头和离码头操纵需考虑风流对船舶影响作用,同时需特别注意船舶机动的停车冲程距离以及船舶倒车冲程距离,以便考虑了船舶性能后,正确操纵,确保船舶航行安全。
3.1 风力转船力矩对操船的影响
航行船舶在掌握了海上风力大小、风方和船舶的作用点后,风力导致船舶转船力矩大小,应通过船舶不同航行状况时支点的位置加以确认。
1)当航行船舶在正常漂浮的状态时,以船舶重心作为支点,从而风力导致船舶转船力矩Ma为:
其中lG为重心至船首的距离,Cma为风力转船力矩系数,Cma值的大小随船舶种类、载况和船舶受风面积的大小与分布的情况以及风舷角的不同而不同。图1为一油轮和集装箱船的Cma曲线。由图可知,这两类船舶在正横稍前受风时,Cma=0;θ=90°即正横受风,Cma很小;斜顶风、斜顺风时,Cma最大;正横后受风时Cma又比正横前受风时大;θ=0°、180°时,Cma=0。

图1 集装箱船和油轮的Cma曲线
2)当船舶靠离泊中受风作用,如船首固定或尾离方式离泊时,船舶以船首为支点,则Ma为:
3)当船舶采用首离方式离泊或船尾一端固定时,则船舶以船尾为支点,风力转船力矩Ma为:
3.2 水动力转船力矩对操船的影响
当水动力大小、方向、作用点求出后,即可据船舶转动的支点确定水动力转船力矩。
若以船首为支点时,水动力转船力矩MW为:
MW=FWsinγ×aW
若以重心为支点时,相当于船舶在航行中,则MW为:
上式中:Cwm=Cwysinγ(lG-aw)
Cwm称为水动力转船力矩系数。Cwm与漂角β及H/d的关系,如图2所示。由图2可知,当β=0°或180°时,Cwm=0,MW=0;当β=90°时,Cwm近似为零,MW=0;β>90°时,Cwm值比β<90°时大,说明由于船体首瘦尾肥,向船尾方向运动时水动力构成的转船力矩较大。
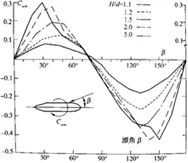
图2 Cwm与β及H/d的关系图
3.3 船舶停车冲程的估算法
船舶航行过程中的减速或停车动作时,呈现直线航行状态船舶的运动方程计算公式为:
上式中:T1表示与船舶减速后主机功率及转速对应的船舶航行推力,船舶停车时T1值为0。
英国人Topley船长成功推导出航行船舶减速、停车状态时运动下列的近似计算表达式。当船舶主机的转速降低致使船舶航速减小时,航行船舶自初速v0减小到与降低后船舶主机转速相应的定常航行速度过程中,此时某一时段船舶航行速度以及此间船舶航行距离S的表达式为:
上式中:C代表船舶减速航行时段常数,单位用min表示。C值随着船舶的排水量差异而不同。C值越小,船舶航行减速越明显,C值可从表1查阅。v0、v1单位用kn表示,t单位用min表示,S单位用nmiLe表示。

表1 C值随船舶排水量变化图
3.4 船舶倒车停船所需时间及船舶冲程的估算法
假设船舶主机倒转时产生主机产生和倒车功率相应比例的船舶倒车拉力,且设定船舶船体阻力和船舶速度平方呈现正比例关系;此时船舶的船体附加质量达到船体质量的20%以上,船舶倒车拉力作为主机正车推力90%及以上,可用以下的关系式表示:
上式中:s表示船舶最短的停船距离,距离单位用m表示;t表示船舶的冲时,冲时单位用m表示;△代表船舶排水量,船舶排水量单位用t表示;v0表示船舶主机倒车时航行速度,航速单位用kn表示;R0表示船舶航速为v0时船舶航行阻力。
4.船舶靠码头与离码头的操纵方法
4.1 船舶顶流法靠码头(船舶右舷靠码头)
1)航行船舶距离码头泊位1nmiLe前需带拖协助靠码头操纵的拖轮,因为港池内航道窄且常有交叉通行船舶,所以航行船舶需及早控制航行余速。当船舶距离码头泊位3~4nmiLe时航速宜控制在5kn以内,此时协助靠码头的拖轮就位。如果两艘拖轮应分别带在船舶左舷船首和船舶左舷船尾,马力大的拖轮带在船艏,当船舶距离码头泊位0.5nmiLe时,船舶航行速度宜控制在3~4kn及以下。
2)当船舶船艏距离码头泊位100m时,同时船舶船艏平码头泊位旗后抛锚。
3)船舶首倒缆首先上桩,船舶锚链刹住,主机进车施加满舵,从而使船舶的船尾逐渐向码头泊位靠拢。
4)当船身的船艏、船艉与码头基本平行时,船艏和船艉开始同时绞缆,使船舶缓缓靠妥码头。
5)最后的步骤是完车、完舵。
①根据船舶空载状态实际航行速度、海流流速以及船舶入泊时控制余速的需要适时主机停车船舶淌航,当船舶船艏抵达码头泊位附近后方停车船艉靠泊时应保持船身距码头2倍船宽距离,距离泊位N旗1.5倍船宽处作为靠码头的泊位参照点,结合船舶操纵者站位和船舶靠泊角选择方便操作的串视线,并且靠码头操纵中持续调整。船舶靠拢角使船舶进入串视线内;随着船舶淌航速度持续降低,船舶舵效不能保持船艏向时,应短暂主机进车产生舵效后,船舶驶入泊位附近后主机停车靠船舶下风区泊位,因为风力减小宜操纵下风舵,所以必要时可以主机微速进车,以防止船舶的船艏逼近前泊位的他船;同理,当船舶船艏驶出他船的下风区泊位时,应及时操纵上风舵以便稳定船舶船艏。
②当船舶的船艏持平码头泊位N 旗时,立即抛外舷锚一节入水拖锚,施加左舵,根据抛锚过程中船舶余速及锚链刹住时间,视情况决定主机进车,主机用车的转数和持续用车时间,应以船舶船艏具有适当航行速度靠拢码头为前提,并且在主机停车时不能因为锚链张力而拉开船艏为度。
③当船舶船艏距离码头泊位20m左右时,假如船舶冲势尚难适时控制宜主机用车后退二减小船速,第一时间带上船舶前横缆,情况允许尽快带妥前倒缆和首缆,并迅速绞进且挽牢缆绳。
④指令拖轮从缓慢进车到快速进车而推进船舶船艉,当船舶船艉距离码头泊位20m左右时,指令拖轮慢速进车而后顶住船舶,以防船舶外移或后退,快速带妥船舶后横缆、后倒缆和尾缆,拖轮顶住船舶,船员快速绞紧各缆绳并上桩挽牢。假如确系因船舶船艏各缆绳过度绞进导致船艉各缆绳难以绞进时,此时不宜指令拖轮进车硬顶或者缆车强行绞进;假如适当调整船艏各缆绳,同时考虑到顺利靠码头的需要而调整缆绳,则船舶缆车可顺利绞进船艉靠拢泊位。船舶各缆绳调整到位并挽牢后可解拖缆。
⑤假如船舶因操纵不当,导致船舶船艏距码头泊位过远从而影响带船舶首横缆时,应指令拖轮慢车顶推船艏,松锚链配合拖轮行动,先靠拢船舶船艏后,再指令拖轮慢速进车顶船艉,协助船舶靠船艉。
4.2 码头泊位原地掉头法靠码头(船舶左舷靠码头)
1)掌握和控制船舶航行速度,由于港池内航路多弯曲且狭窄、水域受限和航路交叉、渔船违章通行等因素影响,船舶应及时减速或控制船舶速度。且要充分考虑到顺风、顺流时风流对船舶的影响,从而采取船舶主机减速或倒车的措施;船舶速度在5~6kn最适宜,当船舶到达防浪堤口后应控制船速在3kn左右或者维持最低舵效的船舶速度。
2)对于因为船舶受顺风、顺流影响或船舶舵效原因导致无法有效控制船舶速度时,船长应及时请求拖轮协助船舶降速以保证船舶保向航行或保向操作。
3)当船舶航至距离码头泊位约1.5倍船长位置,且此时船舶船艏持平码头泊位旗时,立即抛右舷锚2节甲板时刹牢、施加右满舵。视操纵船舶的余速、船舶船艏距离码头泊位的距离及主机减速情况决定是否主机倒车,主机倒车的转数和持续用车时间,根据船舶船艏转向的快慢程度和拖首锚效果而确定。
4)当最慢速主机进车船舶船艏转过码头后指令缓慢松船艏锚链。如果船舶移动退势难以控制时应果断采取主机短暂快进车措施、同时带妥船舶前横缆绳、继而带妥前倒缆绳并刹牢船艏锚链。
5)主机慢进车船舶船艏内转船舶船艉向外移动,当操纵船舶与码头呈基本平行状态时主机停车、船员缓慢松开船舶首横缆绳、首倒缆绳,尾缆绳,适时指令船舶尾横缆绳上桩挽牢、施加正舵,继而采取施加左满舵措施。
6)充分考虑船舶船艉外移速度对船舶操纵的影响,必要时主机倒车控制船舶位置或者拖轮协助拖开船艉,船舶前后各缆绳上桩后缆车绞紧缆绳。因为船舶船艉外移、船舶船艏各缆绳受力很大此时不宜强行缆车绞缆,应使用拖轮协助顶推靠拢船艉。船舶靠上码头泊位后,固定船艏和船艉各缆绳且挽牢缆绳后,方可解拖轮。
7)假如因为船舶操纵不当,船舶整体外传速度太快,应使用左满舵、主机微速进车措施控制船舶位置,船舶尾倒缆带上缆桩后,船艏人员松锚链配合,从而船舶缓慢速度、船身平行码头状态靠妥码头。
4.3 船舶船艉受流影响时的操纵
1)船舶原地向左调头法离码头
①机舱通知主机备妥以后,安排两艘拖轮分别带在船舶左船头位置和船舶左船尾位置,并最慢速进车顶住船舶,确保船舶平行码头状态离码头,首先解脱船舶首缆绳和尾缆绳,然后再解脱船舶前、后倒缆绳。
②当船舶缆绳全部解脱并收妥,确保清爽后,两拖轮慢慢松缆绳并就位,船长指令拖轮主机微速后退拖带船舶移动。根据船舶位移需要适时调整拖轮拖力,当船舶船位离开码头距离约1倍船宽时,船舶上流端流压使船艏快速偏转移动,当船舶船艉距离码头2倍船宽时,船艉拖轮拖缆需要保持持续受力并密切关注船艉向内转和向外移动的趋势变化。保持船舶船艉与码头保持合适距离,当船舶船艉及清爽后,船艉拖缆快速进车顶推船舶,从而达到船舶加速调头的目的。
③船舶操纵切忌主机快速用车和施加小舵角加速调转船艏,此时用主机进车或倒车控制船舶船体前冲和后缩,稍有不慎易发生触碰码头或者附近船舶事故。当船舶船艉离开码头距离100m左右时,船舶调转船艏90°时,船舶受流影响船体后缩移动,此时应主机进车抑制船舶退势。
④船舶船艏转到150°左右方向时,指令船舶前、后拖轮主机停车,假如船舶船艏转向速度太快时,主机进车配合施加右舵甚至右满舵,使船艏移动到航道中线附近位置,船舶船速和船位稳定后,解脱前、后拖轮拖缆,船舶主机加车航行到计划航线上。
2)船舶船艏受流影响原地向右调转船艏操纵
①船舶主机备妥后,协助离码头的两艘拖轮分别带在船舶左船艏位置和船舶左船艉位置,最慢速进车顶住船舶,防止船舶位移,然后先解脱船艏头缆绳和船艉尾缆绳,再解脱船舶前、后的倒缆绳。
②确认清爽后,拖轮微速拖带船舶移动。为了保证船舶慢速且船身平行离码头,需要拖轮首先拖轮就位最好的拖带位置,然后适当调整拖缆长度,最大程度发挥拖轮拖力。当船舶离开码头一适当距离时,指令船舶船艉拖轮主机加车、同时船舶船艏拖轮减速,以使船舶顺利离码头。
③当船舶船艏离开码头距离大约2倍船宽距离时,指令船舶船艏拖轮主机停车并准备顶推船舶,但是船艏拖轮不要解脱拖缆以应对急需使用。船舶船艏拖轮适宜慢速顶推,当确认船舶船艏调转与码头保持一定距离,即清爽后,果断指令船舶船艏拖轮快速顶推船舶。
④在两艘拖轮拖力作用下,船舶船艏加速旋转位移,此时船舶船身前冲或后缩,应使用主机进车控制船位,从而使船舶基本保持原地旋转调转船艏。船舶在调转船艏过程中应保持在船舶船艏和码头距离相距100m左右为宜,船舶船艏调转到正横位置附近时,离码头船舶受流力影响以及拖轮拖力作用,船舶后移需及时主机进车抑制船速,控制船舶位于适当位置。
⑤船舶船艏调整转过150°时,指令位于船舶船身前、后的拖轮主机停车,然后适时主机微速进车船舶航行,根据具体实际适时施加反舵角抑制船舶位移使船舶保持在航道中央航行,当船舶航速和航向稳定后指令解脱前、后拖轮拖缆,船舶主机加车驶入计划航线。
5.船舶操纵注意事项
(1)船舶离码头时向左方向调转船艏相比向右调转船艏容易,船舶向左调转船艏过程中船舶船艉贴靠在码头并以码头触点端作为支点进行旋转运动;以船舶船艉作为转心使船舶船艏向外移动量相对船舶船艉是固定值。因为驾驶台距离船艉距离近且相对视线好,此时较容易掌控船舶动态,保持船舶距码头距离易持续维护。船舶船艏向右调转时,船舶基本保持以船艏为转心的旋转态势,此时船艏移动量较小、船位相对固定。反之,当船舶船艉旋转的移动量较大时,船舶驾驶台在船艉的位置距离船艏距离较远、船舶的盲区较大、船舶操纵人员看不清楚船舶船艏整体状况,估算距离码头及周围船舶距离难度增大。船舶调转船艏应充分考虑到顺流调转船艏还是逆流调转船艏,不间断关注流压作用对船舶的影响。船舶受强流影响时可能导致船舶转向困难或者船艏不能实现转向,导致船舶整体漂移。船艏瘦削型船舶转换方向相比船艉转换方向容易,特别在强流作用影响时,船舶调换船艏更加困难且危险程度增大。
(2)当大型或超大型船舶靠码头时,如果船长对码头信息和状况不熟悉,对于靠码头操作无把握时,建议船舶到港外或港池宽敞区域外调转船艏操作,以免引发船舶操纵风险。
(3)当港池大风且流急时,需要充分考虑风流压角大对船舶操纵的影响,因为特定时刻风压角大到使船舶横向航行方能保持船位处于航道中央。船舶应尽早考虑流压影响而采取行动,船舶入泊横距不宜太小而且入泊角度不宜太大,此操纵必须高度重视,且保持船舶设备包括主机正常工作方能实现此操纵动作。
(4)船舶调换船艏靠泊操纵时,如果流压作用影响大,需要保证船艉及所有障碍物与码头保持一个富裕安全距离。因为船舶船艏转动的速度快时,需要留有富余空间,此时如果感觉富余空间不理想时需要控制主机速度慢车并施加舵效配合,从而增大船舶与障碍物及码头之间距离,切实避免风流作用和船舶操作失误致使船艉触碰码头。
(5)港口港池内的航道出口相对狭窄,加之进出口的船舶密度大且常有渔船及小型港作船舶进出或横穿航道,此时船舶需要控制好主机转速、船舶船艏备妥双锚待命,值班人员加强值班,必要时安排瞭头及驾驶加强班值班,谨慎驾驶,以确保船舶在预定航线航行,以策船舶航行安全。
