基于视觉定位技术的水力发电厂入侵人员UWB定位方法
2023-11-22潘世一
潘世一
(国能长源十堰水电开发有限公司,湖北 十堰 442000)
0 引 言
随着当今社会能源的广泛应用,能源短缺已成为现今社会需要面临的严重问题[1]。其中电力消耗就是最需解决的主要问题之一,因此通过建立水力发电厂来改善电力能源稀缺这一重要问题。水力发电厂是依据水流的压力将重力势能、动能等变为机械能,采用机械能带动发电机运转。水力发电厂内部的水力机械、发电、变电等一系列控制设备给水力发电厂的发电环境带来一定潜在危险。为保障水力发电厂内安全作业,避免因人员的入侵行为危害生命财产安全,对水力发电厂入侵人员精准检测与定位研究十分必要[2-3]。
众多学者为此展开激烈讨论,马静怡等[4]研究小尺度入侵人员定位,通过深度卷积网络运算入侵人员语义特征,并融合入侵人员位置数据,得出入侵人员的定位区域,再通过双线性差值完成入侵人员精准定位,该方法定位精度高,但该方法计算参数过多,定位计算时间较长。何文玉等[5]研究深度学习的入侵人员定位,采用机器学习对入侵人员图像预处理,得出入侵区域,通过YOLO-V3网络经入侵区域不断训练,完成入侵人员定位,该方法可持续不间断进行入侵人员定位,有效实现对入侵人员的入侵行为预警,但存在测量误差,匹配时间较长。
双目视觉技术可依据人体双眼视觉成像获取同一目标的不同坐标,并通过视觉差获取目标信息;超宽带(UWB)技术是一种可根据较小的脉冲信号完成无线通信的技术,可将定位精度达到厘米。因此本文提出基于视觉定位技术的水力发电厂入侵人员UWB定位方法,实现入侵人员高精度定位。
1 水力发电厂入侵人员UWB视觉定位
1.1 双目视觉的成像原理
双目视觉技术通过模拟人体双眼角度观测三维空间内目标物体,根据几何光学投影原理,人双眼的像点可在人眼视网膜中出现不同位置[6]。这些不同位置产生视觉的视差,依据视觉差理论,将两台摄像机放置在不同位置采集一个目标的图像,获取该目标的视觉差并将视觉差代入视差测距中,从而获取目标物体的三维坐标信息[7]。双目视觉技术的图像采集如图1所示。
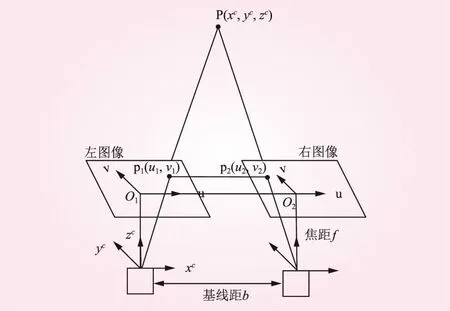
图1 双目视觉技术成像原理
图1中,双目视觉技术图像采集的基线距离为2台摄像机中心位置的连线,基线距离设为b,将摄像机镜头内光心处作为左右相机的坐标系原点O1、O2,由于两个摄像机左右形成的像平面均在镜头光心后侧,不便于计算,因此在距离镜头光心前侧g处,将摄像机左右成像平面放置到g点,保证左右图像坐标系与左右摄像头坐标系位置平行且方向一致。镜头光心处原点与左右图像的原点呈垂直相交关系。将水力发电厂入侵人员作为该方法的目标物体,设目标物体的图像点为p,点p位置与摄像机坐标系原点呈相交线,该相交线在左右像平面上产生交点,点p在左右像平面交点的二维坐标分别为p1(u1,v1)、p2(u2,v2),其中,u、v为图像平面的横纵坐标。设2台摄像机位于相同平面,则点p在左右像平面交点的Y轴相同,即为v1=v2,依据相似三角定义计算点p的三维坐标,公式为
(1)
式中,(xc,yc,zc)为点p在左侧摄像机坐标系中的坐标。
通过目标物体p点左右图像的位置差计算p点在左边图像的坐标为
(2)
式中,d为目标物体p点左右图像的位置差。
依据双目视觉技术中摄像机采集水力发电厂入侵人员图像。为了更精准有效检测定位水力发电厂入侵人员,需结合适当的算法进行处理。
1.2 基于深度学习的水力发电厂入侵人员检测
深度学习算法的图像识别是一个回归问题,可将视频流进行实时处理,将1.1节中经双目视觉技术采集到的水力发电厂入侵人员图像代入到深度学习中,实现水力发电厂入侵人员检测[8-9]。深度学习(Cascade Mask R-CNN,CMR)网络的输入是水力发电厂入侵人员的全部图像,并在网络中加入了金字塔和空洞卷积,用于融合水力发电厂入侵人员图像内多尺度特征与图像上下文数据,获取更好的水力发电厂入侵人员检测效果。深度学习的水力发电厂入侵人员检测结构如图2所示。
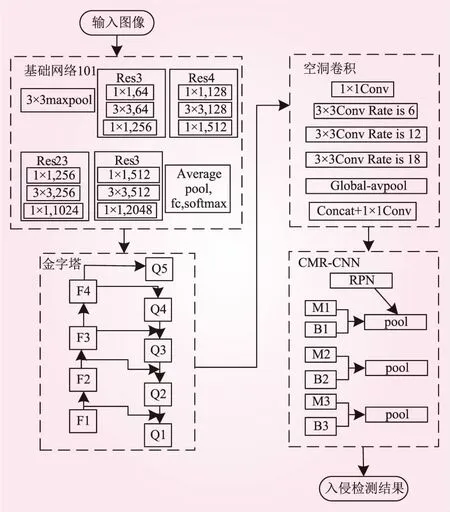
图2 深度学习的水力发电厂入侵人员检测
基础网络层:水力发电厂入侵人员图像经基础网络resnet101的前向计算获取多尺度图像特征{F1,F2,F3,F4}。
金字塔网络层(FPN):对水力发电厂入侵人员图像特征按照从F1到F4的顺序进行上采样,并将其进行横向连接与融合,最终实现多尺度图像特征增强的效果。如,将采样次数为2倍以上的Q2和1×1卷积的先采用图像像素间进行加法运算,再将加法结果进行融合,最终得到Q1。通过从F1到F4的顺序和Q5到Q1的方式得到水力发电厂入侵人员图像的特征图为{Q1,Q2,Q3,Q4,Q5}。Q1为最终融合多尺度特征的特征图,将Q1作为FPN模块的输出结果。
空洞卷积层(ASPP):空洞卷积也是扩张卷积,其本质是增加深度学习中网络识别视线范围,且学习参数的个数保持不变。空洞卷积可有效避免池化层中数据丢失现象,将经基础网络与FPN获取水力发电厂入侵人员图像的特征图Q1作为ASPP的输入数据,将差异化扩张率带入深度学习网络中的卷积层、最大池化层内,获取该图像的多尺度特征。为了高效捕捉水力发电厂入侵人员的图像多尺度特征,将水力发电厂入侵人员图像的特征图通过并行的不同扩张率的空洞卷积进行处理。最后依据深度学习的方法获取水力发电厂入侵人员图像的特征图。
CMR-CNN层:Mask R-CNN与Cascade R-CNN相结合的结构为CMR-CNN,该层属于级联结构,上一层的输出结果就是下一层的输入数据,得出精度更高的水力发电厂入侵人员图像检测结果[10-11]。深度学习网络通过基础网络层、FPN层、ASPP层得到水力发电厂入侵人员图像的最终特征图,通过CMR-CNN层输出水力发电厂入侵人员检测结果[12-13]。双目视觉技术与深度学习共同完成水力发电厂入侵人员检测,以此为基础结合超宽带(UWB)定位技术完成水力发电厂入侵人员定位。
1.3 水力发电厂入侵人员UWB定位
为实现水力发电厂入侵人员定位,将1.2节得出的水力发电厂入侵人员检测结果作为UWB定位中的标签。UWB定位是先将基站和标签的距离信息经双向飞行时间法(TW-TOF)进行计算,并约束多数量基站和标签的距离信息,最后依据基站的指定位置进行求解得出标签位置。UWB定位原理如图3所示。

图3 UWB定位原理
为精准计算标签的三维位置,UWB中基站的数量需至少设置3个及以上,才能获取更好的标签定位效果。设已知基站数量为4个。标签三维位置定位可通过基站的指定位置、基站与标签间距信息完成。基站指定位置可通过测量获取精确数据,因此标签定位的精度直接被基站与标签的间距影响。由于环境和遮挡物等因素的存在,基站与标签之间的距离可能会受到干扰。因此,需要先判定UWB的标定位置和异常测距值,再利用优化的UWB定位算法获取水力发电厂入侵人员定位结果。
1.3.1 判定UWB的标定位置和异常测距值
(3)
式中,TAT为UWB信号发送与接收的时间间隔;c为光速;Δt为当UWB信号处理延迟时产生的时间偏置;nAT为随机测距误差,随着环境与遮挡物的变化而变化;dAT=TATc为基站与标签间距的真实距离;d0=Δt·c为依据时间偏置的稳定性,距离上的常值偏置。


(4)
(5)



(6)

1.3.2 UWB定位设计

(7)
(8)
(9)
(10)
式中,(jx、jy、jz)为标签位置的坐标。
通过最小二乘法计算标签位置为
(11)
(12)
(13)
式中,η为最小二乘法的系数。
通过最小二乘法得出的标签位置与UWB测量值、4个基站位置差值最小。
1.3.3 优化UWB定位
优化定位的UWB方法与最小二乘法相同。具体如下:通过上述UWB基站位置、测距信息及需要计算的标签位置,建立残差,公式为
(14)
(15)

优化公式(15)可表述为当标签位置处于任何时间时,基站与标签间距测量值均能够约束标签位置,但当测量值不精准时,标签位置定位精度会随着测量精度降低而降低。为避免上述情况可将标签移动速度变为一个弱约束,增加两个连续时间内标签定位的约束,结合约束的优化方程为

(16)


(17)

通过上述方法,利用优化UWB定位技术计算标签位置,即可完成水力发电厂入侵人员定位。
2 实验分析
为验证视觉定位技术的水力发电厂入侵人员UWB定位方法有效性,选取某地区水力发电厂为实验对象。采用HIKROBOT双目视觉相机,该视觉相机内具有高质量芯片,可有效覆盖30万到6.04亿像素,成像质量高,设置该相机基线长度是200 mm,焦距是3 mm,采集图像尺寸均为480×640像素;在该水力发电厂500 m2的区域内设置5个USW基站。选取该水力发电厂内某一位作业人员为该水力发电厂的入侵人员进行模拟实验,利用本文方法采集入侵人员图像,并对采集到的入侵人员图像进行检测,结果如图4所示。

图4 入侵人员图像采集与入侵人员检测
根据图4可知,本文方法可清晰准确采集到水力发电厂入侵人员图像,将其作为深度学习网络输入,完成入侵人员检测,获取入侵人员的边缘轮廓信息。实验说明:本文方法采集的入侵人员图像清晰精准,可从中检测出入侵人员身体目标,为后续入侵人员定位提供良好实验基础。
实验分析不同干扰下本文方法的入侵人员图像定位精度。设置该作业人员距离基站50 m,将相机抖动、作业人员处于动态背景下两种情况作为入侵人员图像检测干扰,本文方法的入侵人员图像定位结果如图5所示。
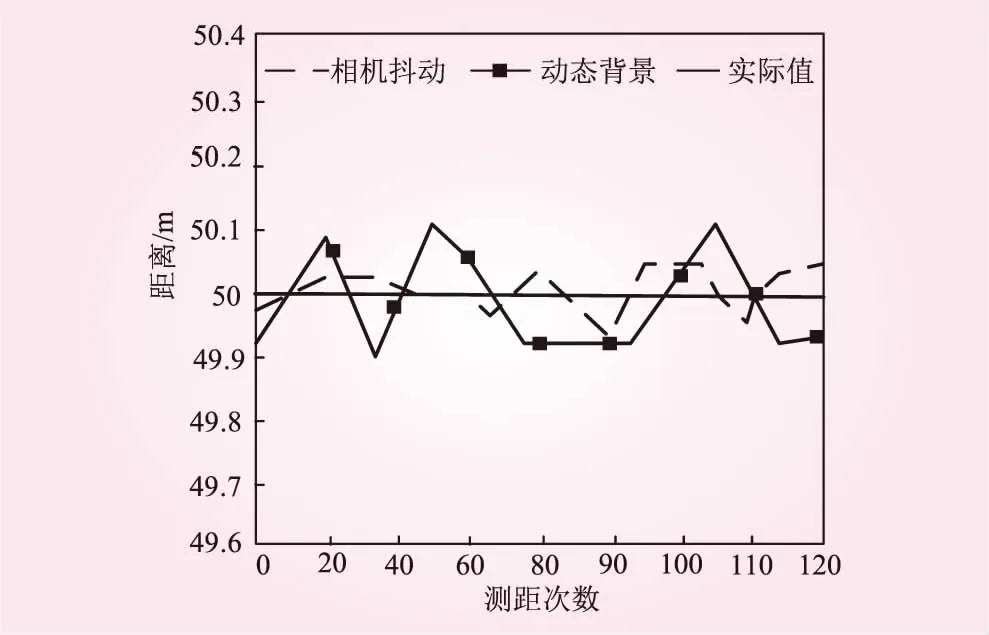
图5 不同干扰下入侵人员图像定位结果
通过图5可知,当相机出现抖动时,本文方法的入侵人员定位结果与实际值误差上下浮动不超过0.06 m,当入侵人员在动态背景干扰下,本文方法图像定位结果与实际值误差上下浮动不超过0.12 m,实验说明:动态背景的干扰比相机抖动干扰产生的误差大,但误差值均符合入侵人员图像定位标准,本文方法在干扰情况下依旧能提供高精度入侵人员定位数据。
实验分析本文方法对入侵人员的定位结果。选取该水力发电厂内一名作业人员作为入侵人员进行定位模拟实验。通过本文方法对该入侵人员行动轨迹进行定位,将定位采集的数据通过MATLAB数学编辑软件进行处理,将入侵人员行动轨迹共分为A、B、C、D、E点进行分析,入侵人员定位效果如图6所示。
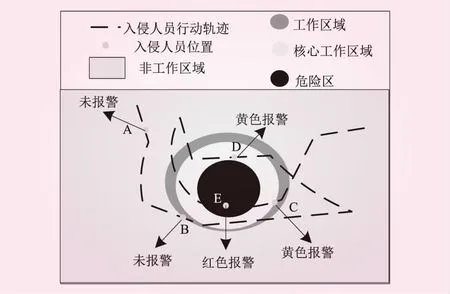
图6 入侵人员定位情况
根据图6可知,本文方法可有效、实时跟踪入侵人员的行动轨迹。当入侵人员行动轨迹处于A、B点时,水力发电厂内部未发生报警现象,说明入侵人员处于非工作区域和工作区域;当入侵人员行动轨迹处于C、D点时,水力发电厂内部发生黄色报警现象,说明入侵人员已进入该水力发电厂核心工作区域;当入侵人员行动轨迹处于E点时,水力发电厂内部发生红色报警现象,说明入侵人员已进入该水力发电厂危险区域,入侵人员可能存在人身安全,需要对入侵人员进行驱逐。实验说明:本文方法可高效实现入侵人员定位,实时反馈入侵人员定位信息,并实现入侵人员的定位信息预警。
3 结 论
研究基于视觉定位技术的水力发电厂入侵人员UWB定位方法,实现水力发电厂入侵人员精准定位。依据双目视觉技术与深度学习完成水力发电厂入侵人员图像采集与入侵人员检测,以水力发电厂入侵人员检测结果为基础,结合优化UWB实现水力发电厂入侵人员定位。实验说明:本文方法对入侵人员图像采集的清晰度较高,可有效检测到入侵人员,且入侵人员定位精度高,可通过定位获取入侵人员行动轨迹,规避入侵人员人身危险,提高水力发电厂安全作业程度。