面向机械臂抓取的档案盒数字标签图像抗干扰识别方法
2023-11-21顾宇欧
顾宇欧,丛 潜,刘 博,黄 晶
(松花江水力发电有限公司丰满大坝重建工程建设局,吉林吉林 132108)
机械臂是机器人研究领域的重要组成部件,将计算机电子、机械控制等多项应用技术集合在一起。进行施工作业时,机械臂元件可以按照预先设置好的路线完成物体抓取指令,并可以根据起始运动位置、终止运动位置的变化情况,自发调整臂关节结构的抓取运动路径[1-2]。与其他类型的物体运输行为相比,机械臂抓取行为不但能够将待运货物由起始点安全转运至目标点,还可以避免电量信号出现过度消耗的情况。在机械臂抓取运输货物的过程中,网络主机可以根据臂关节结构实时位置确定整条运输路径的走向趋势。且已生成的机械臂运动图像能够以数字标签的形式存储于主机元件中,以供其他设备结构的调取与利用。
数字标签是一种多媒体图像信息存储形式,可以根据图像样本所占存储空间的不同,对其进行编码与重排处理,并可以将完成排列后的多媒体图像信息整合成全新的数据集合样本[3]。在识别大面积图像样本时,由于数字标签文件中总是存在明显的噪点参量,且这些噪点信息很难被直接提取出来,这也是导致原始图像抗干扰能力始终达不到理想标准的主要原因。基于深度神经网络的图像识别方法虽然能够避免噪点信息完全覆盖数字标签图像中的固有节点,但却并不能将这些噪点参量完全提取处理。因此该方法在增强原始图像抗干扰能力方面的应用能力相对有限[4]。为解决上述问题,提取机械臂抓取行为的执行思想,并以此为基础,设计一种新型的档案盒数字标签图像抗干扰识别方法。
1 面向机械臂抓取的档案盒数字标签建立
1.1 机械臂运动模型
在对档案盒数字标签图像中噪点信息进行提取的过程中,首先需要对机械臂元件的运动行为建模,进而确定臂关节结构在各个方向上的趋向性运动能力[5-6]。设分别表示X轴、Y轴、Z轴方向上的机械臂运动基向量,εx表示X轴方向上的运动趋向系数,εy表示Y轴方向上的运动趋向系数,εz表示Z轴方向上的运动趋向系数。联立上述物理量,可将臂关节趋向性运动行为表达式X、Y、Z分别表示为:
在式(1)的基础上,设αx表示臂关节结构在X轴方向上的转向系数,αy表示Y轴转向系数,αz表示Z轴转向系数。
机械臂运动模型表达式为:
为使机械臂元件的运动行为保持稳定状态,要求αx系数、αy系数、αz系数取值必须同时属于(0,1]的数值区间。
1.2 抓取位姿标定
抓取位姿标定表达式可以判定所求解机械臂运动模型是否符合档案盒数字标签的构建需求。由于待处理图像中包含大量的常规像素节点与噪点参量,所以在实施抓取位姿标定时,还应考虑所选取标签节点与其他标签节点之间的互联关系[7-8]。设δ表示机械臂抓取运动节点的初始标记系数,dx表示运动位姿步长值在X轴方向上的数值分量,dy表示Y轴方向上的数值分量,dz表示Z轴方向上的数值分量,表示参量dx、dy、dz的平均值。在上述物理量的支持下,联立式(2),可将机械臂抓取位姿标定表达式定义为:
对于原始输入图像而言,只有实现对机械臂抓取位姿的按需标定,才能够根据数字标签节点的排列形式,推断出噪点参量与常规像素参量之间的混合程度,从而实现对噪点信息准确提取。
1.3 抽取系数
抽取系数也叫抽样标定系数,在对待测图像档案盒数字标签节点进行识别时,主机元件可以将抽取系数指标作为参考条件,实现对噪点信息的准确提取[9-10]。设χ表示机械臂抓取执行指令的迭代次数,φ1、φ2、…、φn表示n个不同的机械臂抓取执行指令定义项指标,β表示待测图像中的噪点信息识别系数,f表示数字标签节点排列系数。
面向机械臂抓取的档案盒数字标签抽取系数求解表达式为:
在求解抽取系数表达式时,要求φ1≠φ2≠…φn≠0 的不等式条件恒成立。
2 数字标签图像的抗干扰识别技术
2.1 MNIST数据集
MNIST 数据集是一个完整的数据信息集合空间。对于待测图像而言,只有所选MNIST 数据集合能够将档案盒数字标签信息完全包含在内,才能促进主机元件对噪点参量进行准确提取[11-12]。在不考虑其他干扰条件的情况下,MNIST 数据集合中所包含的数字标签信息越多,主机元件可调度的噪点信息参量也就越多,此时所得识别结果也就越符合实际应用需求。设h表示MNIST 数据集合中的一个随机变量,ΔM表示档案盒数字标签信息的单位累积量,l1、l2表示两个不相等的噪点参量检测特征,k˙表示噪点信息检测系数,φ表示数值标签分布指标。在上述物理量的支持下,联立式(4),可将MNIST 数据集表示为:
在MNIST 数据集合中,任意两个噪点检测特征参量都不可能相等,这也是主机元件能够对噪点信息进行准确识别的主要原因。
2.2 激活函数
在已知机械臂抓取运动行为的前提下,主机元件可以根据数字标签节点的排列形式,完成对待测图像的复原。且在复原处理的过程中,噪点信息参量在档案盒结构中的存储格式始终遵循激活函数条件[13]。所谓激活函数是指主机元件对于图像噪点信息参量的处理能力,若无其他干扰性识别行为的出现,激活函数可以同时标记的噪点信息参量越多,主机元件对于数字标签结构的识别能力也就越强[14]。设ι表示图像噪点信息标记系数,ρ表示数字标签节点在原始待测图像中的分布密度,ϖ表示机械臂抓取指令的执行强度,y~ 表示噪点参量辨识特征,μ表示噪点信息感应系数。
面向机械臂抓取原则的待识别图像激活函数为:
由于数字标签结构的分布形式并不固定,所以在建立激活函数时,应将图像噪点信息的多样性考虑在内。
2.3 初始识别权重
初始识别权重是指处理主机在提取图像噪点信息时所遵循的执行标准,由于机械臂抓取行为的运动形式并不固定,所以初始识别权重表达式必须要适应噪点信息参量的变化状态。在计算过程中,初始识别权重表达式求解受到数据信息筛查系数、识别指令趋向执行特征两项物理量的直接影响[15-16]。数据信息筛查系数常表示为,在激活函数取值不发生改变的情况下,该项物理系数的取值越大,主机元件对于噪点信息参量的识别能力也就越强。识别指令趋向执行特征常表示为I,由于档案盒数字标签结构中图像噪点信息的存储数值不可能为零,所以系数I的取值始终属于(0,+∞)的数值区间。
初始识别权重表达式为:
式中,R表示抗干扰向量的初始取值,R′表示基于系数R的待识别噪点信息度量值。综合上述指标参量,完成面向机械臂抓取的档案盒数字标签图像抗干扰识别方法的设计[17]。
3 实例分析
在图1 所示机械臂抓取行为过程中,分别利用档案盒数字标签技术、深度神经网络技术对原图像中的噪点信息参量进行提取,前者作为实验组、后者作为对照组。
图1 机械臂抓取行为执行过程
确保在进行实验组、对照组实验时,其他外界因素始终保持一致,具体实验设计流程如下:
利用数字标签技术提取机械臂抓取图像中的噪点信息,记录在实验过程中,主机元件对于噪点参量的提取速率,将所得实验数据作为实验组变量;
将处理后图像恢复至初始状态,确保复原后图像与原始图像的清晰程度完全相同;
利用深度神经网络技术提取机械臂抓取图像中的噪点信息,记录在实验过程中,主机元件对于噪点参量的提取速率,将所得实验数据作为对照组变量;对比所得实验组、对照组数据,总结实验规律;
实验主机在单位时间内所能准确识别的噪点信息数量,可以反映出所采用识别方法在促进原始图像抗干扰能力方面的作用能力。在其他影响因素保持相同的情况下,实验主机在单位时间内所能准确识别的噪点信息数量越多,所采用识别方法在促进原始图像抗干扰能力方面的作用能力也就越强。反之,若实验主机在单位时间内所能准确识别的噪点信息数量相对较少,则表示所采用识别方法在促进原始图像抗干扰能力方面的作用能力也就相对较弱。
以15 min 为一个单位时长,分析在4 个单位时长内,实验组、对照组方法对于原图像中噪点信息的识别能力,结果如表1 所示。
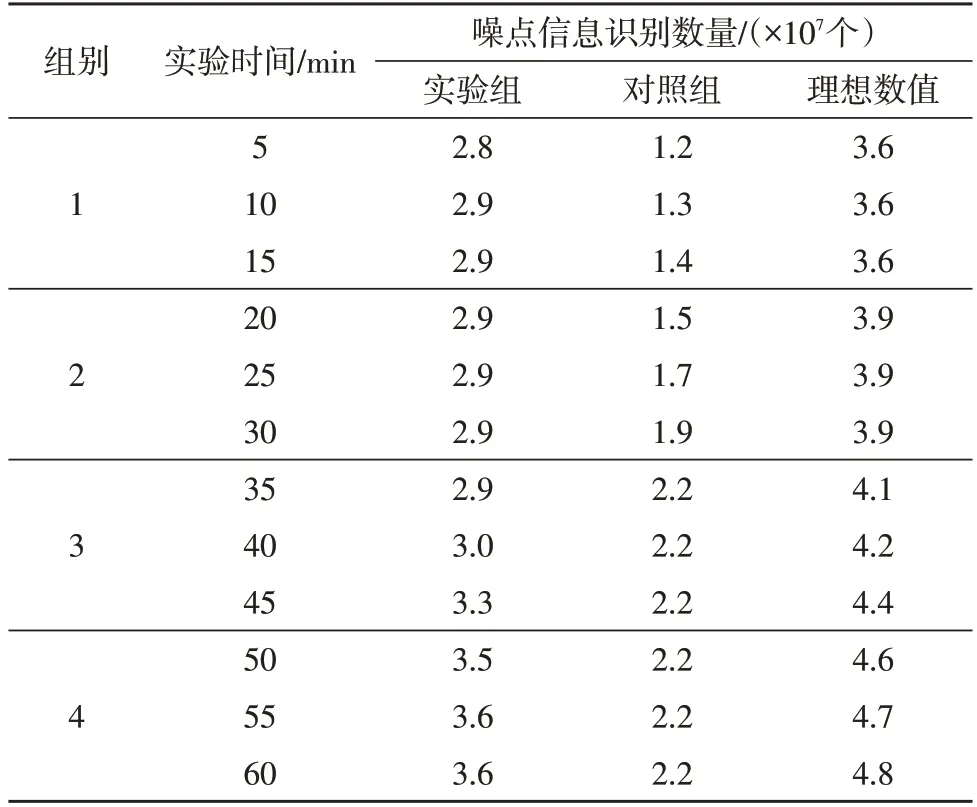
表1 识别能力对比
实验组:在实验组方法作用下,实验主机在单位时间内所能准确识别的噪点信息数量呈现出先上升、再稳定、最后继续上升的变化态势。整个实验过程中,实验组噪点信息识别数量与理想识别数值之间的最大差值结果仅能达到1.2×107个。
对照组:在对照组方法作用下,实验主机在单位时间内所能准确识别的噪点信息数量呈现出先上升、再趋于稳定的变化态势。整个实验过程中,对照组噪点信息识别数量均值始终小于实验组,与理想识别数值之间的最大差值结果达到了2.6×107个,高于实验组差值水平。
实验结论为:1)深度神经网络技术在提取机械臂抓取图像噪点信息方面的应用能力相对有限,并不符合增强原始图像抗干扰能力的实际应用需求。2)数字标签技术则可以针对机械臂抓取图像中的噪点信息进行精准提取,在增强原始图像抗干扰性方面的应用能力相对较强,与深度神经网络技术相比,更符合实际应用需求。
4 结束语
对于机械臂抓取图像来说,基于数字标签技术的识别方法可以根据机械臂运动模型,求解噪点信息抽取系数,再联合激活函数表达式确定初始识别权重指标的计算数值。与基于深度神经网络技术的识别方法相比,这种新型识别方法能够准确识别数字标签图像中的噪点参量,缩小了噪点信息识别结果与实际存在数量之间的差值水平,也增强了原始图像的抗干扰性能力。
