基于时空棱镜的时空风险表达与规避方法
2023-11-20管凌霄吴传均刘颖真
管凌霄,吴传均,刘 潇,刘颖真,李 斓
(1.地理信息工程国家重点实验室,北京 100094;2.解放军61206 部队,北京 100043)
0 引言
环境风险的表达和规避计算是GIS 研究的一个重点问题,也是时空大数据分析应用的重要方向。由于风险的评价存在大量多重、相互冲突和不相称的评价标准[1],在复杂环境中,风险的表达通常是被转化为空间环境下的成本或效益决策模型(如文献[2-3])。要将复杂的时空风险表达量化,需建立科学的风险影响分析模型,并确定一种可兼容各类风险的表达框架和规避风险算法。针对上述问题,本文参考时间地理学相关理论和方法,定义了危险逃逸时空棱镜,用于表达人类躲避风险的边界条件,并从时空角度阐述了风险表达和规避计算的思路,最后通过设计一个机动任务的仿真场景验证该算法的合理性。
1 研究背景
1.1 传统研究面临的挑战
当前大多相关研究通过模拟或规划的方法来表达风险影响和进行规避分析,比如通过扩撒模型来讨论火灾伴生/次生污染物的扩散[4],公路隧道火灾扩散和疏散问题[5];通过路径规划算法、蜂群算法、蚁群算法、遗传算法等规划方法来评估人们面临需求或风险时的移动能力[6-15]。这些研究方法对于讨论较为单纯环境下的风险扩散和规避能力评估具有重要作用,但是难以运用于复杂动态环境,尤其是在具有对抗行动的环境下。
1)这些方法一般是在单纯的空间或割离的时空中进行讨论,但真实环境不是静止的也不是突变的,而是连续变化的;且风险也不总是只随着空间活动累积,有些风险即使没有空间活动也会不断累积,比如低温冻伤风险。由于空间GIS 方法特点的限制,难以准确表达一些与时间相关的动态风险影响,如简化或忽略环境和态势随时间的连续变化,忽略时间对风险的累积作用等。这些原因必然导致算法无法融入态势、能力、参与人员生物习性等复杂风险要素,致使研究脱离实际。
2)通过规划的方法得出的风险规避能力结论是点状的,或许能够得到所谓的“最优表现”“极端表现”,但是无法从整体上评估一般表现,表现范围等。且对抗环境下,“最优”的一般也是不稳定的,是对抗双方都能预料到的,是危险的。相较于推荐具体的“最优方案”,认知由于环境、态势等影响导致的风险时空变化及趋势,评估出己方在任务限定下的可行活动时空范围,才能够给决策者提供更多的对抗策略发挥空间。
1.2 时间地理学带来的启示
时空棱镜是时间地理学(time geography)中的重要研究内容,是一种理解人类、自然和技术之间相互依存关系的普遍方法。时空棱镜是时间地理学的基本要素,研究的是人类活动的边界问题,即一段时间范围内,人类移动速度受环境影响下,能够出现的最大的时空范围。
图1 展示了时空棱镜的基本概念。时间地理学中,用于表达地表活动的时空坐标系可以按照图1方式建立:水平面内相互垂直的X、Y 轴表示地表空间,竖直的T 轴表示时间。如果某对象从锚点P'start出发,以任意不超过某最大速度运动,记可能到达的时空区域为N;以任意不超过最大速度的时空轨迹行进,记能够到达锚点P'end所可能经过的时空区域为R,时空区域U 称为由P'start和P'end确定的时空棱镜,如定义式(1)所示。不在该范围的时空区域受时间预算,环境影响和规则限制,不可能从起点按时到达终点。

图1 时间地理学中的时空棱镜Fig.1 Space-time prism in time geography
时空棱镜是从宏观表达目标活动能力的重要方法,提供了一种表达和讨论人类活动时空可能性的整体视角,可作为目标活动能力的重要评估方法。该方法虽不能反映风险的时空范围、影响以及随时间的传播特点,也不能体现人类面对风险的躲避能力,但提供了在统一时空中研究风险规避的新思路。
2 危险逃逸时空棱镜
2.1 风险事件的时空表达
在空间GIS 分析中,通常可以标出风险事件发生的空间区域,通过观测目标的位置,判定其是否在风险区域内,根据距离风险事件区域的远近,判定其是否会受到波及,但这种方法不考虑风险事件的时间属性,如气象预报未来一段时间内某区域将出现危险天气,其风险事件与空间和时间均相关。假设已知风险事件A 发生于时间区间[t1,t2],风险事件B 为不随时间改变的长期事件,其时空范围如下页图2 所示。当然,现实中风险事件的发生不会如此规则,但在时空坐标系中的表达原理是一致的。

图2 风险事件的时空表达Fig.2 Space and time expression of risk events
2.2 危险逃逸时空棱镜的定义
大部分风险事件是可以承担的,只需讨论其发生时空范围和影响程度,但有部分风险事件是可能造成严重后果的,称之为危险事件,是必须要规避的。本文定义,在对象移动能力受自身特点和环境影响下,有可能躲避危险事件的时空边界范围称为危险逃逸时空棱镜。
在物理空间中,任何移动都需要时间,所以受限于移动能力而一定会在未来受到某危险事件影响的时空区域,也应属于有风险的时空区域。如图3所示,若图2 中A 事件是危险事件,可将其周围时空划分为5 类区域:
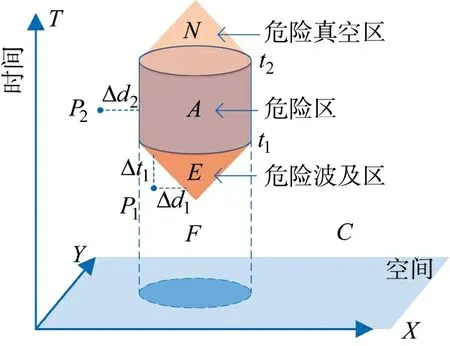
图3 受危险事件影响的各时空区域Fig.3 Regions of time and space affected by dangerous events
A 区:危险事件发生的时空区域,对象在此时空出现会出现危险;
N 区:危险真空区,此时空区域危险已经消失,但受到移动速度的限制,没有经过A 区域的对象不可能出现在该区域;
E 区:危险波及的时空区域,对象在此时空出现,虽然当前时间不会受到影响,但受到移动速度的限制,未来一定受到影响;
F 区:可能出现危险的区域,对象以合理的路径和速度一定有机会逃离危险区域,但是如果不移动,或移动的路径不合理,也可能受到A 区影响;
C 区:危险周边区,在此区域预计不会出现风险,但根据危险的性质可能受到波及,距离危险时空越近受波及概率越大。
另外结合图2 中的风险事件B,还有一类区域为B 区:危险常在区,在此区域的危险不随时间消失,任何时间出现在该区域都会处于危险中。
如果对象在E 区、A 区、N 区内任意一处出现过,必然在未来、现在或曾经经历危险事件A,位于其他区域则不会受影响或有能力逃避,因此,定义构成这3 个区的最外围时空边界(即图3 中红色半透明空间几何图形)为危险事件A 的危险逃逸时空棱镜,用于表达有能力规避危险事件A 的最大时空区域。
2.3 危险逃逸时空棱镜的计算思路
危险逃逸时空棱镜与普通时空棱镜刚好相反,前者推算的任务承担者在外部,后者在内部。如图4所示,下棱锥表示“未来”,研究处于外部的任务主体能够逃离危险的最晚时空边界,计算时,以危险时空区域边界为起始线,向时间轴的“过去”方向(负轴向)推算;上棱锥计算“过去”,研究处于外部的任务主体在危险过去之后最早能够到达原来属于危险区域的最早时空边界,以危险时空区域边界为起始线,向时间轴的“未来”方向(正轴向)推算。
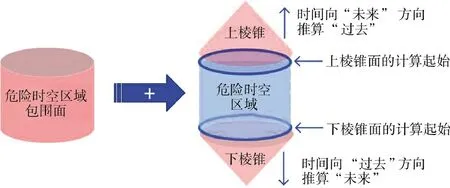
图4 危险逃逸时空棱锥计算方法Fig.4 Calculation method of dangerous escape space-time prism
从含义可见,危险逃逸时空棱镜下棱锥对应普通时空棱镜的上棱锥,上棱锥对应下棱锥,计算过程可参考普通时空棱镜,其计算可以参考CHEN 等进行基于矢量路网的高效计算[9],或参考YIN 等建立的矢量栅格混合模型来理解在时空中求解旅行问题的一般思路。
采用了前期的研究成果对时空棱镜的传统计算方法进行了一定优化[16],主要思想是,首先以等间距的时间距离和空间距离将时空分割为时空体素,建立动态时空环境影响模型。然后,以出发时空点(或潜在的多个出发点)/到达时空点(或潜在的多个到达点)为起始,向临近8 个空间方向计算临近空间的最早到达/最晚出发时间,直到完成计算区域的所有计算,其中,在动态时空环境中行进的时间消耗评估方法参考文献[16]。
3 风险的分类和表达
本章所指风险是指可以承担的风险,区别于“危险”的概念。风险的分类有多种方式,从风险造成威胁的原理来概括,主要分为可靠性风险、规避性风险、代价性风险,本章分别介绍上述类型风险在(普通)时空棱镜和危险逃逸时空棱镜中的表达方法。
3.1 可靠性风险分析
可靠性风险是由于任务执行过程中存在潜在的意外情况,会出现某些计划中的时间或空间无法利用,且缺乏备选时空,间接导致任务执行的损失变大或失败的风险。如图5(a),由于“危险禁行区域”限制,点A 处可选的备用空间明显小于点B,如果发生突发事件导致A、B 两处被破坏,显然在B 点处选择其他可用空间继续完成任务的概率更高,因此,可以称B 点的空间可靠性比A 点高;如图5(b),同类型的任务C 与任务D 预计消耗的时间相同,但是任务C 可用的时间更长,那么如果发生未知因素使得两任务实际完成时间被延长,由于任务C 预留时间更长,故相较而言按时完成任务的概率更高,因此,可以称任务C 比任务D 的时间可靠性高。本文分别将这两类风险称为空间可靠性风险和时间可靠性风险,合称时空可靠性风险。

图5 时空可靠性风险示意图Fig.5 Schematic diagram of space-time reliability risks
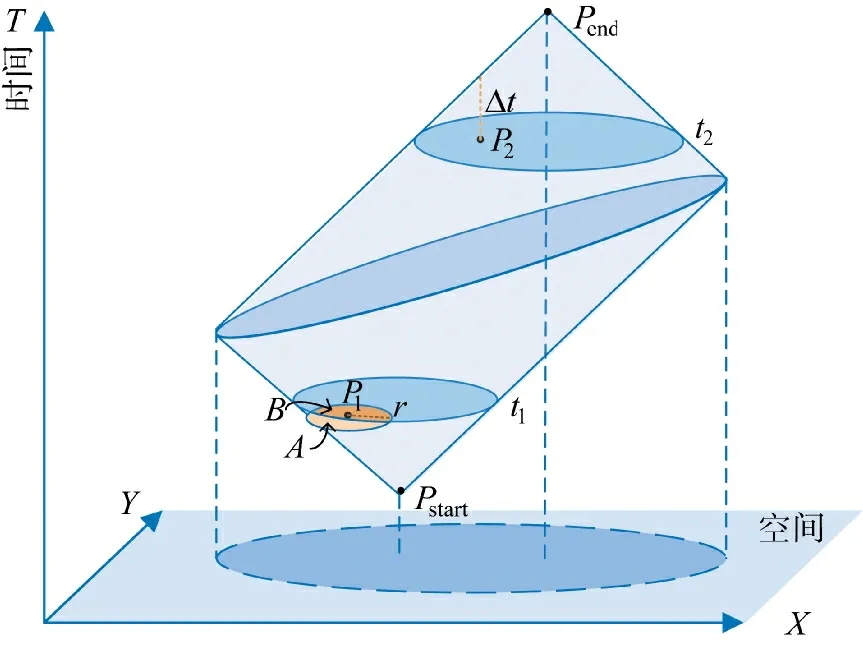
图6 越野活动的时空棱镜与时空可靠性风险Fig.6 The space-time prism and space-time reliability risk of cross-country activities
空间可靠性风险是因突发事件导致无法通过计划中的空间点,且没有备选空间时,导致任务面失败的风险。故评估一个时空点空间容差能力的关键是计算其在时空棱镜内的有效备选空间大小。如图6 中时空点P1,若以其周边半径为r 的空间作为备选,即可在t1时刻的平面内,以P1为中心绘制半径r 的圆,该圆会被时空棱镜分割为在内部的部分B,与在外部的部分A。由于A 无法到达,仅B 可作为有效备选空间。故P1的空间容差能力ES可定义为:在任务主体活动时空棱镜范围内的备选空间面积SB与总备选空间面积SA+B之比。
时间可靠性风险是因突发事件导致在某时空点耗时过多,且没有足够的剩余时间,导致任务失败风险。故评估一个时空点时间容差能力的关键是计算该处可以消耗的时间有多少。如图6 中时空点P2,记时空棱镜内的可用时间为Δt。设当备用时长大于tmax时无时间容差风险,那么P2的时间容差能力ET可定义为:
3.2 规避性风险分析
规避性风险是因距离可能造成毁灭性伤害的危险时空过近,导致容易受到波及的风险,分为时间规避性风险和空间规避性风险。图3 中,设时空点与危险逃逸时空棱镜的时间距离和空间距离分别超过tmax和dmax后无规避性风险,某点实际的时空距离分别是Δt,Δd,那么可定义时间/空间规避性风险分别为:
按照2.2 节的划分,当任务主体位于:
A 区,B 区:所在时空已属于应规避时空,其规避性风险为100%;
E 区:所在时空未来确定性地存在风险,其规避性风险为100%;
F 区:如图3 中P1点,Δd1,Δt1分别代表了其时间距离与空间距离,代入式(4),式(5)可得时间和空间规避性风险;
随着“互联网+”的迅速发展,“+”被引入了各行各业,借助信息技术的发展,“+”在推动教育信息化、现代化等方面发挥着越来越大的作用.教科研对一名教师专业发展的重要性不言而喻,如果我们在常规教科研的基础上将其与“+”融合,形成“教科研+”,这会对推动教师专业成长起着不可估量的作用,同时又会具有一定的时代意义.
C 区:如图3 中P2点,时间规避性风险为0,空间规避性风险可通过将d2代入式(5)获得;
N 区:时间和空间规避性风险均为0。
3.3 代价性风险分析
代价性风险是由于环境和态势影响,可能导致任务执行过程中产生能力损耗、时间消耗、经济损失等各方面代价的风险。规避性风险和代价性风险的主要区别在于,前者的产生是由于躲避无法承担的危险时的次生风险;后者是可以承担的,但应尽量降低的一般风险。代价性风险是作为任务总体代价的一部分,在任务最小代价规划阶段进行统一规划计算的,不必刻意排除。从任务总体代价最小的角度看,部分特殊情景中,局部承受一定风险,反而可能有利于降低总体任务代价。主要分为两类:
与能力相关的代价性风险。此类风险的评估与参与者本身的能力或特点有关,即参与者的不同能力可能影响风险带来的最终代价。比如,机动能力风险。其是指在受环境限制的低速区域面临难以逃离可能出现的意外突发事件的风险,此处的低速仅与环境和能力相关,代表摆脱危险的能力,在短期逃离危险时一般不考虑生物习惯。假设当环境限制的最大可行速度大于时可以忽略低速风险,那么受n 个环境因素影响下的某环境的低速风险RM可以定义为:
客观的代价性风险。是指不由参与者决定的客观环境造成的代价性风险。比如,由于恶劣环境因素导致的我方生存能力降低的风险,比如穿越地雷覆盖区域,敌方火力覆盖区,污染区等,这些风险有些随着空间活动累积,有的随着时间累积。在风险区域内部,有些类型风险影响较为均匀,比如在敌方监控区域,在任何时空被发现的风险都一样;而有的影响与其他参数有关,比如雷区受地雷型号和密度影响,会造成风险不同,需要依赖相关专业知识。当专业模型不足或相关影响较为一致时,可以仅简化考虑相关危险是否存在,存在的区域均可以看作风险为1 的常数函数,例如对于第i 种风险,其表达式为式(7)。而如果风险类型的影响受相关环境因素的大小、浓度、密度、强度等物理特性,或喜好程度、接受程度、承受限度等社会特性影响较大时,应当具体问题具体分析。
4 危险的规避分析方法
在任务路线规划中,不但要掌握我方的可到达时空域,还需要掌握有危险的时空域,甚至是有可能遭遇风险的时空域和更为有益的时空域,用以规划出更为科学合理的任务路线。规划中,我方的任务时空区域Rmission由我方可到达时空域Ravailable,及危险时空区域Rdanger决定。假设以f(·)函数表达危险时空区域的逃逸时空棱镜求解方法,那么可行的任务时空区域Rmission应当是Ravailable与f(Rdanger)的差集,如式(8)所示。
Ravailable的决定因素主要包括我方任务特点、我方能力和生物习性、战场环境等,Rdanger的决定因素主要包括敌方力能和生物习性、敌方任务部署、危险环境等。
分析过程如图7 所示。首先需要对敌方的活动进行分析,比如通过敌方的部署、任务类型、能力、情报信息、态势推断等,结合战场环境,求解预测敌方活动的时空棱镜,根据危险环境的预报信息求解危险环境的时空棱镜,此步骤对应Rdanger的计算;然后,对我方需要避免与敌方的接触的时空方面进行分析,主要考虑因任务类型和我方风险承受能力影响,在环境与我方能力限制之下,计算我方态势和环境危险逃逸时空棱镜,此步骤对应f(Rdanger)的计算;下一步,根据我方任务、能力计算我方可到达的时空区域Ravailable;最后在去除应当避免危险空域,即得到任务时空域。

图7 任务时空域分析过程Fig.7 The time-space domain analysis process of the mission
除此之外,时空中还存在无风险甚至有益的时空区域Rpositive,以及具有一定风险承受能力的基础上,可以接触的风险时空区域Rrisk,Rrisk和Rpositive均属于可到达、可利用的时空区域,除了途径的代价和收益不同以外,在时空方案规划计算中,按总体代价最小,收益最大为目标进行形式统一的计算即可。
5 实验与分析
5.1 设计实验场景
为证明本文方法的有效性,现在E120°~121°,N41°~42°区域设计仿真验证。该地区属于丘陵地形,有河流、桥梁、渡口(已知开放时间)等复杂地形地貌和人文要素,已知土质、降雨等条件,在此基础上假设红蓝对抗态势。本文将站在红方视角,通过本文方法对风险表达和规避方法进行讨论。
态势设想:
当前态势图如图8 所示,标注时刻为当日0点。与红方相关的地理位置区域信息标注为A,与蓝方相关的地理位置区域信息标注为B;观察哨和火力点的警戒能力均受通视限制,在当日的气象条件下,通视半径为5 km;红方掌握的情报信息包括:蓝方部分部队预定11∶00 点开始,从疑似部署区BLArea1向指定地域机动,此外,BFPoint1的部队会在每日11∶00~14∶00 执行巡逻任务。

图8 态势概览Fig.8 Overview of situation
其中,火力覆盖区是指一方具有绝对火力优势的区域;管控区是指政治或文化上对红蓝一方有民意基础和归属感的区域;疑似部署区是指不明确对方具体部署位置的大致空间范围;观察哨的主要作用是侦察和警戒,火力能力较小;火力点除了警戒外,还具有较大火力威慑能力,驻扎有小规模部队,承担对周边的巡逻任务;有效时间(灰色文字标注)指受装备特点或其他影响,划定区域实际发挥作用的时间。
任务想定:
红蓝双方均具有一定的风险承担能力,但应尽量降低已知风险。红方任务为至早上午9∶00 从A点出发,至晚下午13∶30 到达突击点B,要求避免与蓝方主力部队相遇(位于BLArea1),且要谨慎进入(具有可以承担的风险的)蓝方管控区、火力覆盖区、观察哨覆盖区和疑似部署区。
5.2 复杂态势下的危险规避和风险分布
图9 是以红方的视角对态势进行时空预测的结果,其中橙色时空为Rdanger的逃逸时空棱镜f(Rdanger),为红方不可进入区域,绿色时空为Rpositive,黄色时空为Rrisk,属于可优化区域。其中,由于从BLArea1区域开始机动的蓝方部队部署区不确定,本文计算的危险逃逸时空棱镜以BLArea1的疑似部署区为起算线。

图9 态势时空预测结果Fig.9 Space-time prediction results of situation
如图10 所示,设定红方的机动计划是从红方营地机动到蓝方营地,其中绿色时空棱镜是红方能够完成此次机动任务且不受态势危险影响下的最小活动时空范围,在态势影响下与无态势影响下,由于危险规避导致的不同主要有3 处:
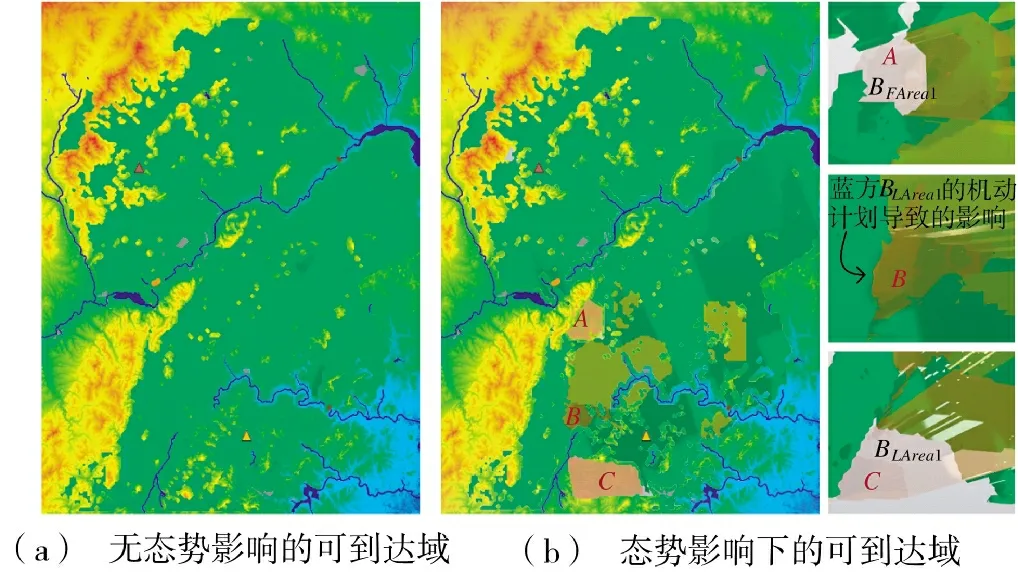
图10 态势对可到达时空域的影响Fig.10 The influence of situation on the reachable domain of space and time
1)红方应当避免蓝方火力覆盖区,故A 区的时空棱镜在BLArea1时空区域会因对蓝方的火力攻击行动造成的危险逃逸时空棱镜形成空洞;
2)由于蓝方疑似部署在BLArea1区域的部队有从上午11∶00 开始的机动计划,红方应当避免与之相遇,故B 区的时空棱镜在其途径之处的会形成空洞;
3)由于蓝方疑似部署区域BLArea1仍有部队,红方应避免进入该区域,故在C 区域会形成空洞。
当然,绿色时空棱镜中,风险的分布也并非均匀的,将在Rrisk区域内受到代价风险的影响;在f(Rdanger)周边受到规避风险的影响;在绿色时空棱镜的时空面边缘附近将受到可靠性风险的影响。红方受到上述各类风险的程度由式(2)~式(7)确定。
本文方法是基于可预测环境下的风险分布表达,即在计算前,相关环境的分布和随时间变化都是确定的,但并不意味着其排斥对抗环境下的不确定性讨论。对态势变化和环境不确定性的讨论可以通过变换环境数据来重新评估,对比不同情况的分析结果可以帮助决策者认识环境变化(或某些设想情况)的风险影响变化。
6 结论
综上,本文借鉴时空棱镜的相关研究提出了危险逃逸时空棱镜的概念和计算方法,利用其分析了三种不同风险的表达方法。通过结合时空棱镜可到达域、危险逃逸时空棱镜和风险区域的时空表示方法,可以对态势的时空变化进行精确的量化和表达,实现对风险时空区域和规避能力的精细计算,提供了一种在时空中表达风险和规避能力的整体视角。本文通过一个越野机动任务设定的风险时空分析,验证了该方法对于路线规划的应用价值。下一阶段将围绕该方法,深入研究其在各类型任务规划中的应用。