超大型半潜浮式风机性能仿真分析
2023-11-18姜子羿蒋善超何坚强
姜子羿,蒋善超,何坚强
(盐城工学院 电气工程学院, 江苏 盐城 224051)
中国拥有丰富的风力发电资源,据统计,离地面高度70 m 的3 级及以上(风功率密度≥ 300 W/m2)风能资源潜在开发量已经超过26亿kW,现有技术条件下实际可装机容量可以达到10亿kW以上。此外,在水深不超过50 m 的近海海域,风电实际可装机容量约为5 亿kW[1]。海上风能资源与陆上风能资源相比,虽然资源总量较小,但其具有风力风能利用率高、稳定性强,距离电力需求大的沿海地区近等优势[2]。因此,我国风电场开发已从小规模陆上风电场走向多种复杂环境的海上风电场。相较于陆上风机,海上浮式风机的工作环境更加复杂,风机质量与尺寸也大幅增加,这对风机的结构动态特性提出了更高的要求,因此,研究风机在复杂载荷下的运动特性对保证风机安全稳定运行意义重大。
目前,国内外许多学者对浮式风机的动力学响应进行了研究。赵志新等[3]以DTU 10 MW 风机为研究对象,基于浮式风机“气动—水动—控制—弹性”全耦合分析模型,使用 FAST 软件对DTU 10 MW 半潜式风机系统在不同工况下的动力特性进行了分析。施伟等[4]选取新型钢筋混凝土结构半潜浮式风机平台展开研究,采用ANSYS/AQWA 建立半潜浮式基础的水动力数值模型,研究该平台的水动力性能。Goupee 等[5]在荷兰海事研究所(MARIN)波浪水池中开展了关于SPAR 式、半潜式和TLP 式3种基础形式漂浮式风机的1/50 比例模型水池试验研究,分析每个系统的相对性能,并列举了每个浮动风力涡轮机平台的独特优势和劣势。Wakui 等[6]开发了一个将波高和流入风速作为预览扰动的浮动海上风力发电机系统预测控制模型,并对5 MW 浮动海上风力发电机系统进行了气动弹性-水轮控制耦合仿真,但其研究未考虑风机的非线性特性。Alkarem 等[7]研究了不规则性波动对漂浮式海上风力涡轮机(FOWT)水动力响应的影响,但该研究未考虑风载荷作用。Wang 等[8]利用空气弹性代码HAWC2 对 33 m 水深的DTU 10 MW 参考风力涡轮机进行了耦合空气弹性模拟,对风机受到的最终负载进行评估。
大型化风机可带来更高的发电效益,但尺寸增大也使其受到的作用更加复杂,如绕射力;且由于海上工作环境复杂,浮式风机始终受到风浪作用力、锚链力等环境载荷的联合作用,因此其运动状态总是处于不平衡、不规则状态;加上海水、气流对其结构(如系泊线)的冲击和腐蚀,风机运动状态很可能因结构的破坏而产生巨大的改变,直接影响风机运行安全。因此,开展风机在复杂海洋环境荷载作用下的动力响应研究具有十分重要的意义。
本文采用ANSYS/AQWA、Openfast等软件,以SNL-13.2 MW 半潜式风机为研究对象,根据我国海况设计合理的工况,基于“气动—水动—控制—弹性”全耦合计算模型,针对风机平台水动力性能展开研究。通过对比分析风机系统在不同工况下的动力学响应、系泊故障下的运动性能,综合研究13.2 MW 风机的动态特性,并与同条件下10 MW 风机的动态特性进行对比,为提高半潜浮式风机平台的安全性提供理论参考。
1 计算理论
1.1 风机运动方程
浮式风机时域运动响应取决于其受到的气动载荷、水动载荷、系泊力,其时域运动方程为
式中:Mij表示浮体质量矩阵;M(ij∞)表示频率无穷大时浮体附加质量矩阵;x″j(t)、x′j(t)、xj(t)分别表示浮体在t时刻j自由度时的加速度、速度、位移;D(t)为迟滞函数;Rij为浮体的回复力矩阵;分别表示浮体受到的气动力、水动力、系泊力,kN。
1.2 气动理论
计算风机气动性能的理论主要有:涡轮尾迹法、基于求解N-S方程的CFD 方法[9]、基于叶素动量理论(BEM)[10]的方法等。相较于涡轮尾迹法,CFD 方法,叶素-动量理论以其直观简洁、计算效率高等优点而被广泛应用于水平轴风机研究中,故本文采用BEM 方法求解风轮所受到的气动载荷,叶素截面速度三角形及受力分析如图1所示。图1 中,V是相对速度,m/s;α为局部攻角,(°);β为局部桨距角,(°);φ为风轮平面与相对速度的夹角,(°);U∞为平均风速,m/s;a为轴向诱导因子;a′为切向诱导因子;Ωr为距离轮毂中心r处的叶素转速,rad/s。
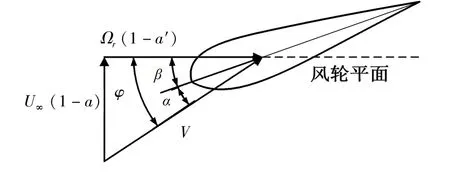
图1 叶素截面速度三角形及受力分析Fig. 1 Velocity triangle and force analysis of blade element section
来流风速和叶轮旋转速度合成为流经叶素的入流风速,入流角度可以根据三角函数关系计算得到。根据动量定理,叶素上的推力和扭矩可以表示为式(2)、式(3):
风机所受风载荷通过TURBSIM[11]软件生成,模拟时间为5 000 s,生成的风模型主要有湍流风与定常风,截取前1 000 s 作可视化处理如图2 所示,通过基于BEM 理论的FAST-Aerodyn 模块计算风机的气动载荷。
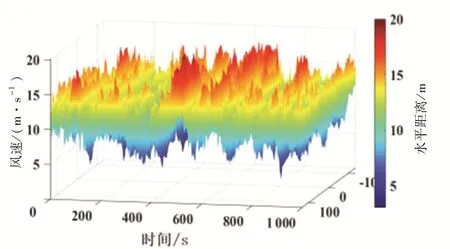
图2 Turbsim模块生成的湍流风风速时程图Fig. 2 Turbulent wind speed time history generated by Turbsim module
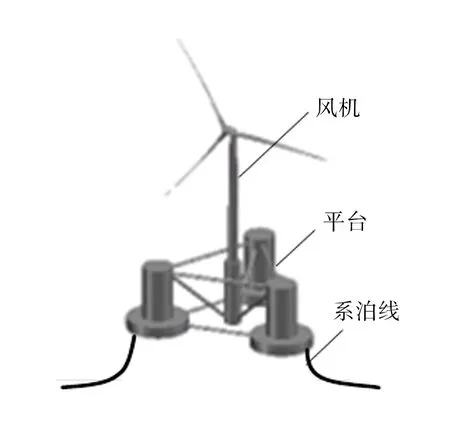
图3 SNL-13.2 MW半潜浮式风机示意图Fig. 3 Schematic diagram of SNL-13.2 MW semisubmersible floating wind turbine
1.3 水动理论
由于本文研究对象为超大型海上风机,其对波浪场的影响无法忽略,必须考虑绕射效应,且其工作环境为超百米深的海域,波幅与波高的比值接近无穷小,海底波流对自由表面引起的非线性影响可以忽略,故本文采用线性微幅波、绕射理论计算波浪载荷,如公式(4)~(8)所示。公式(4)~(8)分别为控制方程、自由表面边界条件、海底边界条件、物体表面条件和Sommerfeld条件[11]。
式中:x、y、z分别为物体的横坐标、纵坐标、竖坐标,m;S(x,y,z)=0为物体表面方程;d为海底与自由面间的距离,m;Φ为入射波速度势;g为重力加速度,m/s2;n为浮体表面某点的外法线矢量。
2 半潜浮式风机模型参数
本文将桑迪亚国家实验室(Sandia National Laboratories)公开的SNL-13.2 MW 半潜浮式风机计算模型[12]作为研究对象,其示意图如图 3 所示。该机组为三叶片水平轴风机,包含风机、平台和系泊系统等3 部分。
2.1 风机模型参数
SNL-13.2 MW 半潜浮式风机的塔架采用改进后的 NREL 5 MW 风机塔架,风轮叶片则采用桑迪亚国家实验室开发的100 m 级叶片SNL100-02[13]。风轮与轮毂直径分别为205 m、5 m;轮毂中心高度为 133.5 m;额定风速为11.3 m/s;风轮、塔架的质量分别为 422 131 kg、1 452 131 kg,风机及其平台其他参数参见文献[14]。
根据文献[15],按1.5 的比例放大OC4 平台得到13.2 MW风机平台。该平台由1根连接着塔架的主柱和3 根与浮筒相连的偏移柱组成,主柱与偏移柱通过5 套铁架组连接,每个偏移柱从静止水位线(SWL)上方开始,然后继续在水下延伸;3 个偏移柱的底部是一个直径较大的圆柱体即基柱,该结构有助于抑制垂荡运动。SNL-13.2 MW风机平台的具体参数如表1所示。
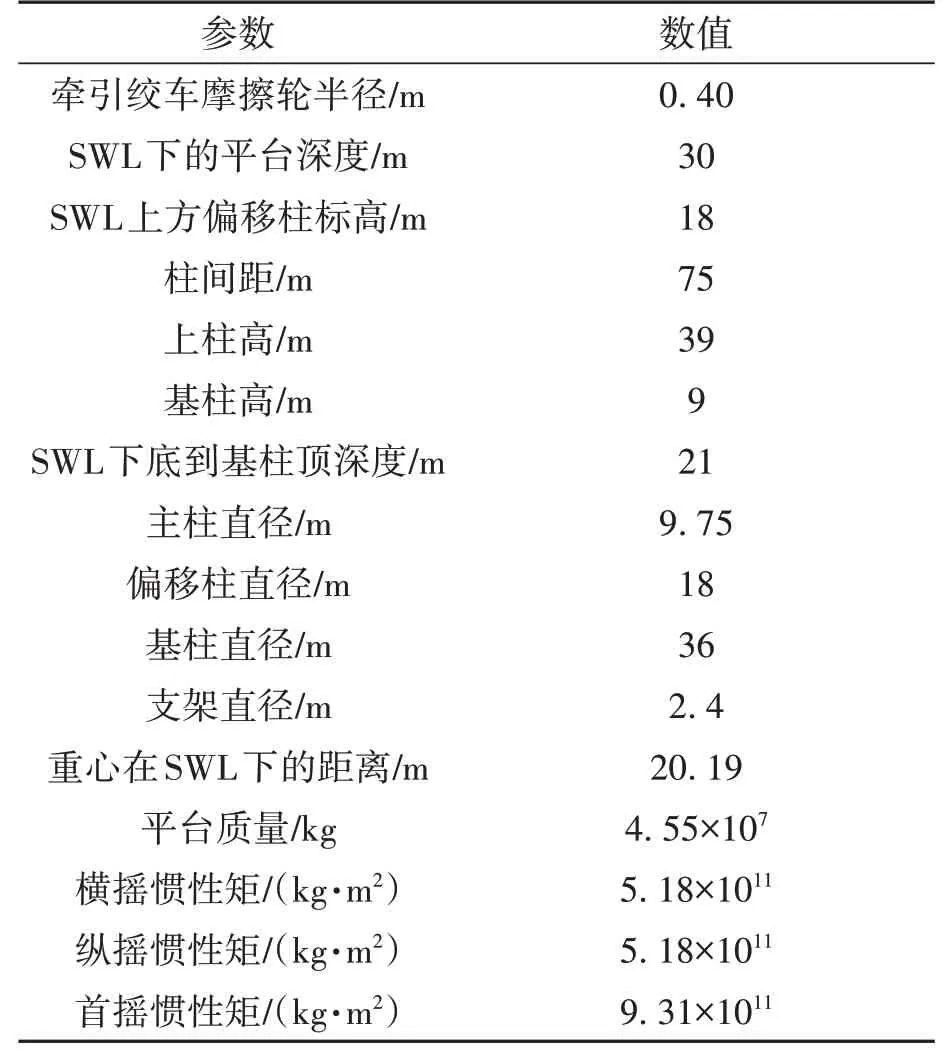
表1 SNL-13.2 MW风机平台参数Table1 SNL-13.2 MW wind turbine platform parameters
风机的系泊系统由 3 条锚链组成,每两条锚链之间的夹角为 120°,缆孔布置在静止水位线下21 m处的底柱顶部,与深度为150 m锚点相连接,布置方式如图4所示。

图4 系泊系统布置示意图Fig. 4 Layout diagram of mooring system
2.2 计算工况
本节为风浪联合作用下的SNL-13.2 MW 半潜浮式风机的时域仿真模拟设计工况。风机实际工况复杂多变,故计算将JONSWAP 谱生成的不规则波作为水动载荷的基本类型,并且考虑湍流风对风机运动的影响。
为了使工况更符合实际,仿真结果更适用于我国海域,工况设计参考了IEC 61400 标准[16]及我国相关海域的风浪流统计数据[17],工况具体数据如表2所示。
表2 不同工况下的环境参数Table 2 Environmental parameters at different working conditions
3 仿真结果与分析
漂浮式风机平台动态响应特性的研究,必须考虑风波耦合作用[18]。本节主要模拟 13.2 MW超大型半潜浮式风机系统在“气动—水动—系泊—控制”全耦合条件下的运动响应。由于纵荡、纵摇、首摇运动对半潜浮式风机而言较为重要,故本文仅研究纵荡、纵摇、首摇运动响应。根据表 2 环境参数,使用 FAST 对SNL-13.2 MW 浮式风机系统与DTU 10 MW 风机系统[19]进行全耦合分析,波浪载荷为JONSWAP 谱生成的不规则波,入射方向为 0°;风荷载选取湍流风,入射方向为0°。计算总时长为5 000 s,截取1 000 ~4 000 s 的时程数据消去瞬态反应对计算结果的影响。
3.1 风机运动响应的时域分析
3.1.1 波高变化对风机运动响应的影响
图5 为浮式风机系统在正常海况不同波高作用下纵荡、横荡、首摇方向的时域运动响应。由图5可知,风机纵荡运动幅度受波高影响最明显,首摇运动受波高影响最不明显,这是因为波浪入射方向与风机系统平台对称轴方向平行,因此波浪所引起的载荷具有对称性,对风机系统造成的首摇响应几乎可以忽略不计,此时,风机系统的首摇运动响应主要由风载荷引起。在湍流风工况下,风机的运动响应幅度更加剧烈,由图5 可知,SNL-13.2 MW 半潜浮式风机系统在正常海况不规则波及湍流风作用下,平台运动响应较小,浮式风机平台运动响应表现为在各自由度方向上做无规则的振荡运动。在风浪发生变化的条件下,风机系统运动达到平衡状态时,纵荡方向的运动响应幅值为最大为20 m,横荡方向的运动响应幅值为4 m,首摇方向的运动响应幅值最大为7.1°(-4.1°,+3.1°)。一般而言,风机在正常运行工况下的漂移不应超过工作水深的5%,摇摆不超过±3°[20],可见SNL 半潜浮式风机系统在正常运行下的运动响应是基本满足要求的,能保证风机的安全运转。
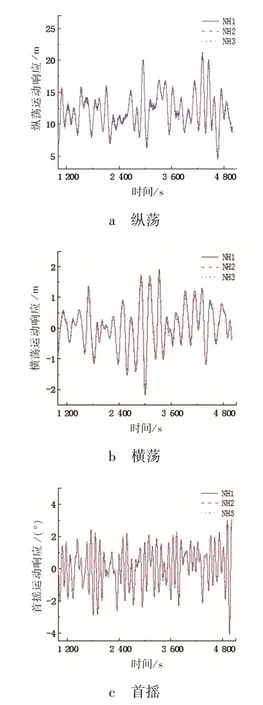
图5 波高变化下风机的时域动态响应图Fig. 5 Time domain dynamic response of the wind turbine at different wave height
3.1.2 风速变化对风机运动响应的影响
图6 为半潜浮式风机系统在湍流风作用下,风速改变时,风机的纵荡、横荡以及首摇方向的时域运动响应。
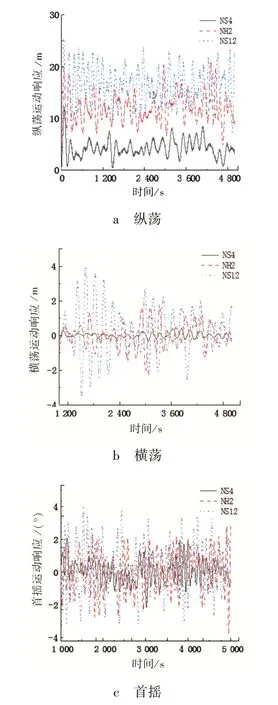
图6 风速变化下的风机的时域动态响应图Fig. 6 Time domain dynamic response of the wind turbine at different wind speed
由图6 可知,正常工况不规则波湍流风作用下,风速越大,风机纵荡运动稳定位置的偏移幅度越大,但稳定后的纵荡幅度随风速增大而略有变大;湍流风作用下的各自由度运动幅度更大,因湍流风风速在y和z方向均有分量且其实时风速在平均风速附近振荡。另外,从图6a 注意到,风速从4 m/s增大到8 m/s对纵荡稳定位置造成的偏移量要大于风速从8 m/s 增大到12 m/s 给纵荡稳定位置造成的偏移量,这是由于当风速从8 m/s变化到12 m/s时,风速超过了风机的额定风速,风机变桨造成的。在风速发生变化的条件下,风机系统运动达到平衡状态时,纵荡方向的运动响应幅值最大为24 m ,横荡方向的运动响应幅值为6 m,首摇方向的运动响应幅值最大为7.5°。符合文献[21]所述的安全标准,可见SNL-13.2 MW半潜浮式风机系统在正常运行下的运动响应是基本满足要求的,能保证风机的安全运转。
3.2 风机运动响应的频域分析
图7 为浮式风机系统在不同海况下纵荡、纵摇、垂荡方向的功率谱密度曲线。
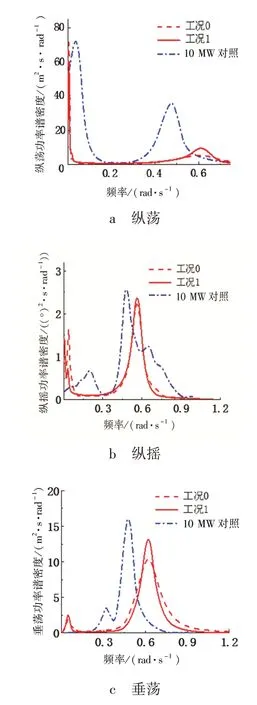
图7 13.2 MW风机系统不同海况下的功率谱密度曲线Fig. 7 Power spectral density of 13.2 MW wind turbine system under different sea conditions
由图7 可知,纵荡方向功率谱密度曲线两处峰值分别出现在0.005 rad/s、0.63 rad/s 分别对应纵荡固有频率与波浪谱峰频率。在纵摇方向上,有3 处峰值,分别位于0.005 rad/s、0.032 rad/s、0.63 rad/s,与纵荡运动的功率谱密度曲线类似,对应纵摇的固有频率与波浪谱峰频率;在垂荡方向上功率谱密度曲线有两处峰值,分别在0.048 rad/s、0.63 rad/s。对比风机在无风工况与风波联合作用工况下的功率谱密度曲线,发现风载荷将对纵荡、纵摇、垂荡运动的较高频运动与纵摇的低频运动造成激励。另外,风机在纵荡、纵摇、垂荡方向的功率谱曲线峰值位置与固有频率、波浪频率的对应现象在类似的风机仿真工作的结果一致[4,21],间接验证了本文仿真的可靠性。
3.3 13.2 MW 风机、10 MW风机动态特性对比
在额定工况下,对SNL-13.2 MW半潜海上浮式风机与DTU 10 MW 风机使用FAST进行全耦合分析,比较图7中13.2 MW 和 10 MW 浮式风机相近工况下运动响应频谱可知:13.2 MW 和 10 MW 浮式风机具有相似的频域特性,10 MW 浮式风机由波浪荷载所激励的波频运动的幅值略高于13.2 MW 浮式风机波频运动的幅值;13.2 MW浮式风机由风荷载所激励的低频纵荡运动的幅值略高于10 MW 浮式风机低频纵荡运动幅值,且前者的低频纵摇幅值要显著高于后者的低频纵摇幅值,验证了文献[4]的观点:浮式海上风机大型化后,风荷载对风机系统运动的低频激励作用更加突出。
4 结论
本文针对 SNL-13.2 MW 半潜浮式风机平台的水动力性能、风浪联合作用下的动力响应及锚泊系统性能展开研究,对平台在不同工况下的运动特性和动力学响应进行了对比分析。得出以下结论:
(1)SNL-13.2 MW 半潜浮式风机平台在湍流风作用的正常运行工况下,纵荡、纵摇、垂荡的响应幅值较小,处于合理范围内,满足风机正常安全工作的规范要求;恶劣工况下,由于变桨作用,风机在纵摇、纵荡方向运动幅值小于额定工况下的幅值,在垂荡方向幅值显著大于额定工况,但在较深水域仍满足安全工作规范要求。
(2)正常工况下,13.2 MW 风机与10 MW 风机在纵荡、纵摇、垂荡方向上的动态响应差异较小。前者的低频纵摇幅值要显著高于后者的低频纵摇幅值,验证了文献[4]观点:浮式海上风机大型化后,风荷载对风机系统运动的低频激励作用更加突出。
