基于四元数的直接判决并行恒模均衡算法
2023-11-18森徐明莹邓明旭
李 森徐明莹 张 璐 邓明旭
(大连海事大学信息科学技术学院 大连 116026)
1 引言
提高无线通信系统的容量一直是无线通信领域研究的焦点。传统的极化分集方案是指在发射端和接收端同时使用一对具有正交极化方向的天线,以相同的频率不同的极化方向传输同样的信息,利用极化方向相互正交的天线发出的信号呈现出的不相关衰落特性来减轻多径效应,从而在发射机和接收机之间保持可靠的通信链路和可接受的服务质量。但是这种传统的极化分集方案并不能实现对频谱资源的有效利用,为了进一步提高频谱利用率,Isaeva等人[1]提出了在相互正交的两个极化天线上分别传输不同信息的4维调制(Quaternion O rthogonal Design,QOD)技术。4维信号在复杂的多径、反射、折射等传播过程中其极化方向的变化会导致两个不同极化方向的接收天线之间产生干扰,因此在应用QOD技术提高通信系统频谱利用率的同时,也需要设计高效的信号处理算法来实现4维信号的均衡和干扰抑制。
4元数是爱尔兰数学家Ham ilton在1843年首先提出的,因其本身固有的结构特点成为处理3维或4维信号相关问题的一个重要工具。例如最近的一些研究成果成功地将4元数应用在彩色图像处理[2]、风速预测[3]和矢量传感器阵列信号处理[4]等方面。近年来,人们对4元数神经网络也越来越感兴趣[5],提出了4元数卷积神经网络和4元数递归神经网络等[6]。最早将4元数应用到自适应滤波算法中的是Took和M andic[7],他们提出了4元数最小均方误差(Quaternion Least Mean Square,QLMS)算法。针对4元数不同的梯度求导规则,研究人员又陆续提出了QLMS算法的其他表达形式以及改进算法。例如:Xu等人[8]提出了基于广义哈密顿实演算(Generalized Ham ilton-Real,GHR)梯度求解规则的QLMS算法;并在此基础上进一步提出了能够统一处理4元数圆和非圆信号的自适应滤波宽线性(W idely Linear, W L)QLMS算法[9]。为了解决QLMS算法收敛速度慢的问题,M engüç等人[10]用4元数误差信号的最小峰度函数代替4元数最小均方误差函数,提出了4元数最小平均峰度(Quatern ion Least-M ean Kurtosis,QLMK)算法并进一步提出了宽线性4元数最小平均峰度(W idely Linear Quaternion Least-M ean KurtosisW L-QLMK)算法[11]。文献[12]使用误差熵作为代价函数,基于信息理论学习技术提出了4元数核最小误差熵(Quaternion Kernel M inimum Error Entropy,QKMEE)自适应算法,解决了QLMS算法在非高斯脉冲噪声环境下性能下降的问题。
以上的算法都是针对单输入单输出(Single Input Single Output,SISO)系统而言的,文献[13]探讨了利用多对双极化天线同时发射和接收垂直与水平极化电磁波的双极化多输入多输出(M ultip le Input M u ltip le Output,M IMO)系统,并使用4元数描述了双极化M IMO系统的信道模型,相较于双极化SISO传输系统,双极化M IMO系统在信道容量及信号传输效率方面有很大的提高。
4元数理论和4元数自适应滤波算法的研究进展为解决4维调制信号的均衡和干扰抑制问题奠定了理论基础。文献[14]用4元数有限冲击响应滤波器来模拟正交极化信道对传输信号产生的影响。文献[15]将2维调制的4QAM(Quadrature Am plitude Modulation,QAM)方案扩展到正交极化天线系统中的QOD的16Q2AM(Quaternion QAM,Q2AM)方案,并利用4元数4个部分之间彼此相互正交的特性将16Q2AM调制信号表示为4元数形式,在此基础上利用QLMS算法提出了一种基于训练信号的均衡方案解决了4元数有限冲击响应信道引起的码间干扰问题。文献[16]又进一步提出了一种基于4元数的恒模盲均衡(Quaternion Constan t M odu lus A lgorithm,QCM A)算法。仿真结果表明QLMS和QCMA两种算法都较好地实现了正交极化信道的均衡。由于QLMS算法是基于训练信号的,因此会降低通信系统的传输效率。QCMA盲均衡算法虽然可以提高通信系统的传输效率,但是由于QCMA算法的代价函数与相位无关导致均衡后的星座图会产生随机角度的相位偏移,使均衡器输出的稳态均方误差(Mean Square Error,MSE)过大。为了解决这个问题,参考在2维调制方案中的并行盲均衡算法[17–20]的思想,本文将直接判决(Direct Decision,DD)[21]的QLMS算法和QCMA算法相结合,提出了一种改进的4元数直接判决并行恒模(QCMA+DDQLMS)算法,利用QCMA算法能使眼图尽快张开和直接判决的QLMS算法收敛速度快、MSE小的优点,在实现均衡输出无相位模糊的同时还具有更小的MSE。
2 4元数基本理论和4维调制(QOD)技术
2.1 4元数基本理论
其中,q*代表q的共轭,qa,qb,qc,qd∈R( R表示实数域)。i,j,k是虚部单位向量,它们之间满足式(2)的关系
4元数在理论上可以理解为对复数的扩展,所以它与复数有着相似的运算法则,但4元数乘法不满足交换律,即:q1q2=q2q1。不过4元数的共轭满足qq*=q*q,因此,4元数的模值表达式为:|q|2=qq*。
对于4元数的梯度求导,本文采用基于GHR的运算规则,GHR演算简化了4元数的乘积规则和链式规则,能够高效计算4元数的导数,GHR导数分为左导数和右导数,本文主要关注左导数,它的求导规则为[8]
其中,f是关于4元数q的4元数函数,∂f/∂qa,∂f/∂qb,∂f/∂qc,∂f/∂qd是f对q的每个部的偏导。
特殊地,对于共轭的导数为
设g也是关于q的4元数函数,对于4元数函数相乘时的求导GHR演算中引入了一种新的求导规则[9]
其中∂f/∂q g,∂f/∂q g*也是一种GHR左导数,但只对某些特殊的函数形式才有定义,具体内容可以参考文献[9]中给出的表1。
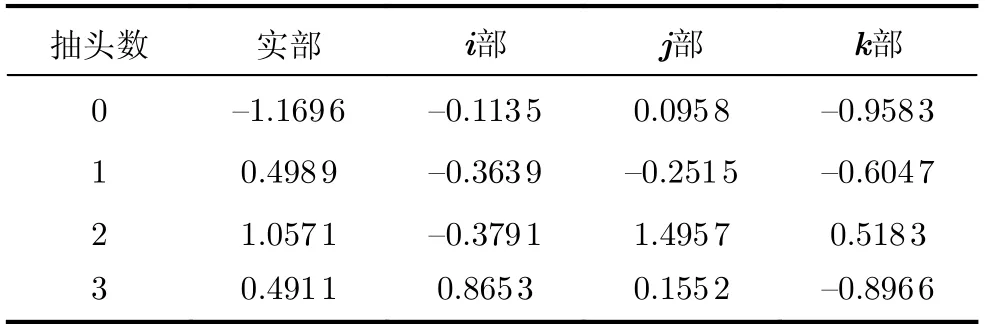
表1 4-抽头4元数信道脉冲响应
2.2 4维调制(QOD)技术
为了进一步提高频谱利用率,在双极化天线的基础上提出了QOD技术,信号通过QOD技术调制后经由正交极化天线发射将产生4维信号。在2维调制技术中基带信号可以采用复数表示,例如4QAM调制时基带信号的实部和虚部可以分别取1或–1,构成4种组合;16QAM调制时基带信号的实部和虚部可以分别取1,–1,3,–3中的一个值,构成16种组合。在QOD技术中,可以用4元数来表示4维基带信号[15]。例如:4元数的4个部分别取1或–1,则构成16种不同的组合,称这种调制方式为16Q2AM;同理,4元数的4个部分分别取1,–1,3,–3中的一个值,则一共有256种组合,称这种调制方式为256Q2AM。
3 4元数自适应均衡算法
4元数值无线通信系统模型如图1所示,4维信号s(n)经4元数有限冲击响应信道h(n)传输后在均衡器输入端和4元数加性噪声n(n)一起进入到4元数均衡器中。4元数均衡器的输入信号矢量为x(n)=[x(n),x(n-1),...,x(n-L+1)]T,其中x(n)可以表示为

图1 4元数值无线通信系统模型
其中*表示卷积运算。均衡器的输出为
其中,w(n)=[w0(n),w1(n),...,w L-1(n)]T为4元数值的均衡器权矢量,L为均衡器的长度。
3.1 4元数最小均方误差(QLMS)算法
QLMS算法的代价函数为
其中,d(n)为均衡器期望输出的4维信号,也就是已知的训练序列。
QLMS算法权矢量w(n)的更新公式为[14]
其中,µ>0为QLMS算法迭代步长。
3.2 4元数恒模盲均衡(QCMA)算法
QCMA算法的代价函数为

迭代步长大小决定了每次更新后均衡器抽头系数的变化程度,进而影响算法的收敛速度和稳定性。具体而言,在一定范围内,算法的迭代步长越大,抽头系数更新的幅度就越大,算法收敛速度也会更快。然而,如果步长过大则可能导致算法不稳定,甚至出现震荡现象。相反,如果步长过小则算法收敛速度会变慢。因此需要在保证收敛的前提下选择合适的迭代步长。
3.3 4元数直接判决并行恒模均衡算法
QLMS算法在实际应用中,必须有训练序列才能完成均衡,会降低通信系统的传输效率。QCMA盲均衡算法虽然不需要训练序列,但是它的均衡结果会产生随机角度的相位偏移,导致M SE较大。为了克服QCMA算法稳态误差大和QLMS算法需要训练序列的问题,本文将基于判决引导的最小均方误差(Decision-Directed QLMS,DD-QLMS)算法与QCMA算法相结合提出了一种4元数直接判决并行恒模均衡(QCM A+DD-QLM S)算法,首先利用QCMA算法张开眼图,然后利用DD-QLMS算法进一步减小MSE。4元数直接判决并行恒模均衡器的原理图如图2所示,该方案由一个QCMA均衡器和一个同时工作的D D-Q L M S 均衡器组成,设wd(n)=[wd,0(n),wd,1(n),...,wd,L-1(n)]T为D DQLMS算法的权矢量,则直接判决并行恒模均衡器的权矢量可以表示为w(n)=wc(n)+wd(n),均衡器的输出为
其中,QCMA算法权矢量wc(n)的更新方程按式(11)计算。
µd>0 为DD-Q LM S算法迭代步长。由于DDQLMS算法中的期望信号为并行均衡器输出的判决信号,为了保证算法的有效性在QCMA+DD-QLMS并行算法中上述权矢量的更新过程只有在利用QCMA算法将眼图打开后才工作。定义利用QCMA算法进行权矢量更新后整个均衡器的输出为
通过判断QCMA算法权矢量更新前后均衡器的判决输出是否相同来判断眼图是否打开,即
如果眼图没有打开则继续利用QCMA算法来打开眼图,DD-QLMS算法不发挥作用;如果眼图已经打开则进一步利用DD-QLMS算法减小均衡器的输出误差。因此最终在QCMA+DD-QLMS并行算法中DD-QLMS算法的权矢量更新公式为
4 仿真实验
设信道脉冲响应h(n)为4抽头的4元数FIR滤波器,其系数的具体取值如表1所示[16]。
MSE是衡量盲均衡算法的一个重要性能指标,MSE 的定义为M SE=其中m代表M en tecar lo运行次数,在本文中取m=300。由于4维调制信号有4维坐标,无法直接画出4维调制信号的星座图,所以本文中以2维星座图或3维星座图的形式来表示4维调制信号。当以2维星座图的形式来表示4维调制信号时共有两个2维星座图,1个2维星座图表示i和实部,1个2维星座图表示j和k部。当以3维星座图的形式来表示4维调制信号时共有4张图,每张图中包括4元数4个部中的任意3个部。
实验1输入信号为16Q2AM信号,噪声采用4元数值加性高斯白噪声,信噪比设为25 dB,均衡器长度L=15,采用中心抽头系数初始化的方法。QCMA算法的迭代步长设为µc=0.001 3[16],QCMA+DDQLMS算法的迭代步长首先设为情形1(C1)中的参数:µc=0.001 3,µd=0.001 2。对QCMA和QCMA+DD-QLMS算法进行实验仿真。均衡前的星座图如图3所示,各个极化方向上的信号已经完全无法分辨。图4和图5分别给出了利用QCM A和QCM A+DDQLMS算法均衡后的2维星座图,图6和图7分别给出了利用QCMA和QCMA+DD-QLMS算法均衡后3维星座图。从均衡后的星座图中可以看出,由于QCMA算法的代价函数中只考虑了信号的模值,而没有考虑到信号的相位信息,因此其均衡后的星座图出现了明显的相位偏移现象,而QCMA+DDQLMS并行算法中先用QCMA算法来张开眼图,然后在DD-QLMS算法中利用并行均衡器输出的直接判决信号作为参考信号找出输出信号中与之最接近的点,既考虑了幅值又考虑了相位,因此均衡后的星座图没有出现相位模糊。

图3 16Q2AM调制时均衡前3维星座图

图4 16Q2AM 调制时QCMA算法均衡后2维星座图

图5 16Q2AM调制时QCMA+DD-QLMS算法均衡后2维星座图

图6 16Q2AM 调制时QCMA算法均衡后3维星座图
为了验证步长对算法收敛性及稳态性能的影响,在图8中除了给出上述两种情况下的MSE收敛曲线还增加了QCM A+DD-QLM S算法在情形2(C2)µc=0.002,µd=0.001 2时的收敛曲线。从图8的对比结果图可看出,对比QCMA算法,QCMA+DD-QLMS算法具有更小的稳态MSE。而对于具有不同迭代步长的QCMA+DD-QLMS算法,迭代步长与算法的收敛速度是呈正向关系的,即迭代步长越大算法的收敛速度越快;而迭代步长与算法的稳态性能是呈反向关系的,即迭代步长越大算法的稳态性能越差、稳态MSE越大。

图8 16Q2AM调制时QCMA和QCMA+DD-QLMS算法MSE收敛曲线对比图
实验2输入信号为256Q2AM信号,噪声同样采用4元加性高斯白噪声,信噪比设为45 dB,两个算法的迭代步长分别设为µc=0.000 005,µd=0.000 08,均衡器长度L=15,采用中心抽头系数初始化的方法,对QCMA算法和QCMA+DD-QLMS进行实验仿真。均衡前的星座图如图9所示,各个极化方向上的信号同样也是完全无法分辨。图10和图11分别给出了利用QCMA和QCMA+DD-QLMS算法均衡后的2维星座图,图12和图13分别给出了利用QCMA和QCM A+DD-QLM S算法均衡后的3维星座图,图14给出了两种算法的MSE收敛曲线对比图。

图10 256Q2AM调制时QCMA算法均衡后2维星座图

图12 256Q2AM调制时QCMA算法均衡后3维星座图

图13 256Q2AM调制时QCMA+DD-QLMS算法均衡后3维星座图

图14 256Q2AM调制时QCMA和QCMA+DD-QLMS算法MSE收敛曲线对比图
从仿真结果的均衡后星座图可看出,两种算法均完成了均衡任务,但是QCMA算法均衡后的星座图出现明显的相位偏移现象,收敛后的MSE也较大,而QCMA+DD-QLMS算法均衡后的信号都聚集在各自星座点的周围,并没有出现相位模糊的现象且得到了更小的稳态MSE。但QCMA+DDQLMS算法是将QCMA算法与DD-QLMS算法并行操作,很显然它的计算复杂度要高于QCMA算法。
5 结论
QCM A算法虽然实现简单,计算复杂度低,但是均衡后会出现相位模糊现象且MSE较大。为了解决这个问题,本文提出一种基于QCMA算法和DD-QLM S算法相结合的QCMA+DD-QLMS并行算法。所提出的算法充分利用了QCMA算法能较好地打开眼图的特性和DD-QLMS算法MSE小的优点。对QCMA和QCMA+DD-QLMS算法进行了仿真验证,从均衡后的星座图及算法的M SE收敛曲线来看,虽然QCMA+DD-QLMS算法较QCMA算法的计算复杂度高,但是QCMA+DD-QLMS算法很好地解决了QCMA算法的相位模糊问题,使得均衡后的输出具有更小的MSE。
