基于视觉技术太阳视位置跟踪控制系统的研制
2023-11-16郝慧芬刘艳辉
郝慧芬 刘艳辉
(1 鄂尔多斯职业学院 内蒙古鄂尔多斯 017000 2 包头轻工职业技术学院 内蒙古包头 014010)
0 引言
随着经济发展速度加快,人类对能源的需求不断增加,面对不可再生能源日益耗尽的现状,对可再生能源开发利用显得尤为重要。太阳能作为可再生能源具有应用广泛、获取容易、取之不尽用之不竭的特点,由于其安全可靠和清洁干净,正在被广泛开发和利用。在国家能源政策的大力支持下,太阳能产业迅速发展,就拿光伏发电来说,2022 年全国光伏发电新增并网容量87.4 GW,截至2022 年底,全国光伏发电累计并网容量392.04 GW[1]。尽管太阳能的优点众多,仍存在缺点,制约了它当前的利用和发展。比如其稳定性差,受地理位置、季节变换以及气候条件等自然因素影响较大,导致到达地面的太阳辐照度是间断且不稳定的;能流密度小,夏季晴朗天气正午时分太阳辐射辐照度最大,然而垂直于太阳光线的地球表面每平方米可以接收的太阳辐射功率只有1 353 W,远远小于到达地球表面太阳辐射能总量173 000 TW[2-3]。目前,提高太阳能的利用率,主要从2 个方面进行研究:①研究太阳能板材质,提升转换率,从而提升太阳能的利用效率,提升难度大,效果不明显;②检测太阳位置,控制太阳能板使其与太阳光线保持垂直,以提升太阳能利用率[3],提升效率高,提升方法的研究领域广,容易实现。
本跟踪系统是基于视觉技术检测太阳视位置,应用PLC双轴控制完成对太阳光线的定位和精准平稳的跟踪,使太阳能板采光面始终与太阳光线垂直,开辟了太阳能检测跟踪新方式,有效地提升了太阳能的利用率。鄂尔多斯地处内蒙古高原腹地,太阳能丰富,光照强度好,为研究太阳视位置跟踪控制系统提供了得天独厚的地理条件。
1 系统总体结构
本文研究的太阳视位置跟踪控制系统基于视觉技术间歇获取太阳视位置,采用PLC 实现双轴自动跟踪控制的方式,由位置检测装置和跟踪控制装置组成。系统框架如图1 所示。
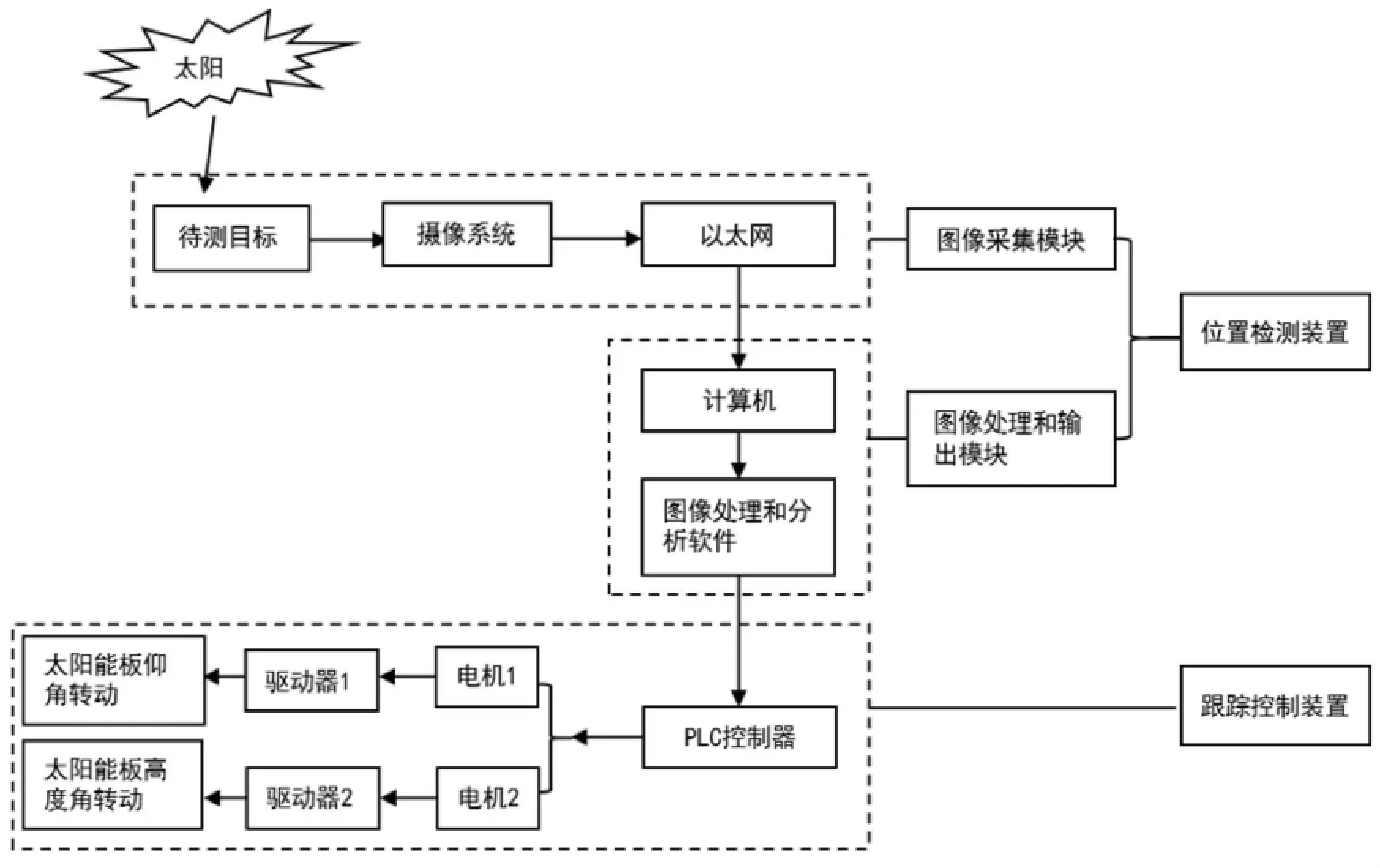
图1 系统框架图
2 位置检测装置
位置检测装置主要由图像采集模块、图像处理和输出模块组成:图像采集模块作为检测装置的重要部分,主要用来实时采集影子图像,是准确获取太阳视位置的基础[4],其由待测目标和摄影系统2 部分组成;图像处理模块包括图像处理、图像分析和视位置算法等部分,将采集到的影子图像通过图像处理软件Matlab 的一系列处理后,经图像分析获取相关参数,应用视位置算法可快速准确计算出太阳高度角和方位角。
太阳视位置应用影子成像原理获取分3 步。①建立地平面平台,在建立好的地平面平台上设计地平坐标系,地平坐标系是用来表示太阳在天空中的方位角和高度角以及其周日变化等[5],可为后续提取的影子向量提供方向,同时参照地平坐标系可从图像中提取标准长度像素值,以此度量影子像素长度。②选取合适的直杆固定在建立好的地平坐标原点并与地平面平台垂直,调整CMOS 摄像系统位置和焦距,采集完整清晰不失真的影子图像,并保证拍摄到直杆与坐标原点重合,然后通过以太网快速将采集到的影子图像传输给计算机图像处理软件Matlab,处理软件对影子图像进行图像翻转和阈值分割处理,从图像中提取出图像中的坐标系和影子轮廓,经边缘检测和图像分析,获取坐标系东西方向向量、影子方向向量、标准长度像素值和影子像素长度值等参数。③按照公式(1)和公式(2)算法计算太阳视位置高度角和方位角。如图2 所示,太阳高度角是太阳光线与影子间的夹角Hs,与直杆长度构成直角三角形,可按照公式(1)算出;太阳方位角可近似地看作是阴影与正南方的夹角As,以原点为中心,以正南方向为起始角度,顺时针为正值,逆时针为负值[6-7],按照公式(2)算出。
3 跟踪控制装置
跟踪控制装置主要由方位角电机和驱动器、高度角电机和驱动器、PLC 控制器组成。这种双轴式的跟踪方式,可实现太阳高度角和方位角2 个方位的跟踪控制,跟踪精度更高,稳定性更好。跟踪控制装置在驱动2 个轴转动时都选用了步进电机,运行平稳、无累计误差、跟踪精度高。
(1)太阳高度角跟踪。太阳高度角的跟踪通过可伸缩电动推杆的伸缩位移来调节太阳能板的仰俯角度,实现高度角的跟踪。可伸缩电动推杆通过齿轮减速后带动螺杆、螺母把电机旋转变为直线运动,利用电机正、反转完成推、拉动作。伸缩杆通过驱动器与PLC 连接,建立伸缩杆伸缩位移量与太阳能板仰俯角度转动大小的算法,将算好的数据发送给PLC 控制程序。PLC 将计算好的脉冲信号传输给驱动器,驱动器控制可伸缩电动推杆上的步进电机使伸缩杆移动相应的位移,从而推动太阳能板绕轴俯仰转动,完成太阳高度角的跟踪。其中,可伸缩电动推杆两端安装有限位开关,伸缩杆运行到顶端或低端都会自动断电,使电机及结构不致损坏。
(2)太阳方位角跟踪。太阳方位角的跟踪,是通过控制步进电机转动角度来调整太阳能板转动角度实现方位角的跟踪。按照太阳方位角算法计算,电源每输入1 个脉冲信号,太阳能板绕支撑轴转动的角位移量,将计算好的数据发送给PLC控制器程序,PLC 将计算好的脉冲信号传输给驱动器驱动步进电机转动,并通过减速器减速后带动太阳能板绕支撑主轴转动相应的角位移量,从而带动太阳能板绕支撑主轴转动到计算好的位置,完成太阳方位角的跟踪。太阳方位角跟踪结构设计过程需要设计1 个防电线缠绕结构,以免太阳能板转动和返回过程发生缠绕。
4 系统软件设计
太阳视位置的跟踪系统涉及到的软件有两部分:一部分是硬件的驱动和工作方式,另一部分是检测太阳视位置采集到的相关信号,需要设计控制器内部程序对数据进行处理和分析。另外,还有一些辅助功能的软件设计,该系统软件设计流程如图3 所示。
系统启动后根据太阳在试验地点每日升起的时间自动进行系统初始化。初始化主要包括系统信息初始化和太阳能板跟踪位置初始化,太阳能板跟踪位置初始化采用天文计算方式中的SPA 算法,GPS 与PLC 进行通讯,按照GPS 的配置协议进行配置后,PLC 可通过GPS 获取测量地的地理信息和时间信息[8],将获取的信息传输给SPA 算法计算出太阳视位置,通过驱动器控制太阳方位角电机和太阳高度角电机,使太阳能板转至相应位置,完成太阳能板的初始定位。随后每隔5 min 视觉系统采集影子图像传输给图像处理软件进行图像的处理和分析,提取相关参数,按照视觉技术视位置算法计算太阳高度角和方位角,将计算结果传给PLC 控制程序,驱动电机将太阳能板对准太阳,实现跟踪,直到太阳落山为止。最后,将太阳能板水平复位[9]。
5 实验与分析
实验选择相同型号的50 W 太阳能板,将方位角调整到正南方向,高度角倾斜40°固定安装,与基于视觉技术太阳视位置跟踪控制系统进行对比。实验地点在鄂尔多斯职业学院(北纬39°36′54″,东经109°48′56″)空旷无遮挡的地方进行,选择太阳光线充足的5 d,每日实验从早上6 点开始到下午7 点结束,实验记录如表1,基于视觉技术太阳视位置跟踪控制系统日发电量相对于固定安装太阳能板的日发电量最高提升了36.8%。通过实验反应太阳能板的发电量受环境温度影响,在环境温度为25 ℃左右时太阳能板的能量转换最高,随着温度上升和降低,太阳能板的能量转换会降低。

表1 发电量对比实验
6 结语
本跟踪系统只是针对基于视觉技术太阳视位置跟踪控制系统中的位置检测和跟踪方式可行性进行的一次验证。经过跟踪实验测试,在晴天光照充足温度在25 ℃左右的情况下,基于视觉技术的跟踪方式与固定式相比较获取太阳能转换提升了36%以上,太阳能转化提升效果明显。但本跟踪系统存在的弊端是受天气影响大,在光照条件不好光线变暗的情况下,视觉系统无法采集到清晰的影子图像,无法准确获取太阳视位置,进而影响跟踪精度。针对目前的状况,后续需要在现有的技术基础之上加入天文计算方式的轨迹跟踪,2 种方式可根据日照情况自动切换实现混合式太阳能跟踪,采用混合式跟踪在一定程度可避免单一跟踪的弊端,并且整个系统能够在全天候、高效率的进行跟踪,可大大提高能量的转换效率[10]。