考虑轮轨黏着的高速列车多目标速度曲线优化
2023-11-16付雅婷朱宏涛
付雅婷 朱宏涛

摘要:高速列車运行环境复杂多变,现有的给定运行速度目标曲线主要考虑列车运行的安全性和正点性,难以改善列车的其他运行性能。为了满足高速列车日益增加的行车需求,并改善列车的运行性能,针对安全、节能、正点及舒适多个目标,考虑轮轨间最优黏着,提出一种改进的多目标运行速度优化方法。首先,在满足区间限速以及列车动力学模型约束的前提下,建立安全、节能、正点、舒适4个评价指标,构成高速列车运行过程多目标优化模型;其次,在节能模型中考虑轮轨间黏着的影响,优化牵引/制动力使得其保持在最优黏着范围内,节约运行能耗;最后,采用基于参考点的非支配排序的优化算法(NSGA-Ⅲ)对多目标运行速度曲线进行优化。对真实线路的仿真验证表明,本文提出的考虑轮轨黏着的优化效果显著提高,尤其在节能方面;优化算法相较于GA和NSGA-Ⅱ,NSGA-Ⅲ算法在收敛效果和收敛速度上均为更优。
关键词:高速列车;多目标优化;黏着;NSGA-Ⅲ
中图分类号:U266 文献标志码:A
本文引用格式:付雅婷,朱宏涛. 考虑轮轨黏着的高速列车多目标速度曲线优化[J]. 华东交通大学学报,2023,40(5):59-67.
Multi-Objective Speed Curve Optimization of High-Speed
Train Considering Wheel Rail Adhesion
Fu Yating1,2,3,Zhu Hongtao1,2,3
(1. School of Electrical & Automation Engineering, East China Jiaotong University, Nanchang 330013, China;2. Jiangxi Key Laboratory for Advanced Control and Optimization, East China Jiaotong University,Nanchang 330013, China;3. State Key Laboratory for Performance Monitoring and Guarantee of Rail Transit Infrastructure, East China Jiaotong University,Nanchang 330013, China)
Abstract:The operation environment of high-speed trains is complex and changeable. The existing target curve of given operation speed mainly considers the safety and punctuality of train operation, which is difficult to improve other operation performance of trains. In order to meet the increasing traffic demand of high-speed trains and improve the running performance of trains, this paper proposes an improved multi-objective speed optimization method for safety, energy saving, punctuality and comfort, considering the optimal adhesion between wheels and rails. First of all, on the premise of meeting the restriction of interval speed limit and train dynamics model, four evaluation indexes of safety, energy saving, punctuality and comfort are established to form a multi-objective optimization model of high-speed train operation process; Secondly, the influence of adhesion between wheel and rail is considered in the energy-saving model, and the traction/braking force is optimized to keep it within the optimal adhesion range, so as to save operating energy consumption; Finally, optimization of multi-objective operating speed curve uses reference point based non dominated sorting optimization algorithm(NSGA-Ⅲ). The simulation results of real lines show that the optimization effect considering wheel rail adhesion is significantly improved, especially in energy saving; Compared with GA and NSGA-Ⅱ, the NSGA-Ⅲ algorithm has better convergence effect and convergence speed.
Key words: high speed train; multi-objective optimization; adhesion; NSGA-Ⅲ
Citation format:FU Y T, ZHU H T. Multi-objective speed curve optimization of high-speed trains considering wheel rail adhesion[J]. Journal of East China Jiaotong University,2023,40(5):59-67.
随着高速列车运行速度以及行车密度的不断增加,列车运行中需要优化的目标也在不断增多[1]。高速列车运行过程优化往往需要同时满足安全、节能、正点、舒适等多个目标,由于这些目标之间存在内部冲突,一个目标的优化往往要以其他目标的劣化为代价[2]。例如为了正点到达车站,行驶中常常加速,则会导致旅客舒适度降低;为了节约能耗,司机尽可能多的采用惰行工况,则会导致列车晚点到站。为此,需要在四个目标中间做出协调和折中处理,不能过分偏袒某一目标,要尽可能使总体的目标达到最优[3]。而列车需要在安全稳定的速度曲线下有序运行并且最大程度地节约列车运行过程中产生的能耗[4]。与此同时,高速列车系统主要的能耗来源于运行过程中牵引/制动力所产生的能耗[5]。而黏着力作为驱使列车运行的最终动力,其上限就是可利用牵引/制动力的最大值。若牵引/制动力超过当前位置的最大黏着力,不仅会降低电机功率,造成极大的能源浪费,而且严重时会导致车轮空转,发生安全事故[6]。若能将牵引/制动力约束在最大黏着力以下,则对降低能耗有着极大的帮助。
针对列车运行过程中的多目标优化问题,以及如何充分利用輪轨间黏着,国内外学者展开了诸多深入的研究与分析。张京[7]将遗传算法与粒子群优化算法相结合,优化工况转换点,以此得到最优的速度曲线。张惠茹[8]提出一种改进的非支配排序遗传算法,并通过实际线路数据生成优化后的节能驾驶曲线。李杰[9]将新型人群搜索算法用于高速列车自动驾驶曲线优化过程。李斌等[10]研究了不同的黏着系数变化引发的列车控制力差异,研究表明轮轨间黏着不足将导致机车的最大牵引力不能有效发挥。吴业庆[11]提出一种辨识最优蠕滑的方法,实现了最大黏着系数的利用,为稳定发挥牵引力提供了指导。Wu[12]研究了牵引过程中低黏着条件下的高速列车轮轨间力相互作用的数值。Xiao[13]提出了一种改进的防滑控制算法用于调整牵引功率,以此确保最大程度地利用轮轨黏着。综合国内外相关文献,本文设想是否可以将高速列车运行多目标优化与轮轨间黏着相结合,使得优化效果更好。
本文以高速列车实际线路数据为基础,将高速列车安全行驶、运行能耗、准点到站、乘坐舒适设为评价指标,区间固定限速条件与列车动力学方程为约束,建立高速列车运行过程多目标优化模型。同时在仿真中设定不同的最大黏着系数以此模拟实际驾驶中列车经过的不同轨面状况,在节能评价指标中将牵引/制动力超出最大黏着力的部分视为能源浪费。最后利用NSGA-Ⅲ算法对模型进行优化,并与GA算法、NSGA-Ⅱ算法进行对比,验证方法的有效性和可行性。
1 高速列车纵向动力学模型
1.1 高速列车动力学方程
参考《列车运行控制系统》,对运行过程中的高速列车进行受力分析,得到列车动力学方程
式中:m为列车的质量;t为列车当前运行时间;s为列车当前位置;v为列车当前运行速度;U为电机施加的控制力,(U>0为牵引力,U<0为制动力);f0为基本阻力,可通过列车的牵引/制动特性曲线确定(图1);fj为附加阻力,由列车当前位置的线路条件(坡道、曲线、隧道)确定,计算如下
式中:wi,wr,ws分别为列车当前所受到的坡道,曲线、隧道附加阻力。坡道附加阻力是列车在坡道上运行时,受到列车重力产生的沿运行方面相反的分力,其表达式如式(3)所示;曲线附加阻力由很多因素有关,难以用理论公式计算,通常采用经验公式计算,其表达式如式(4)所示;隧道附加阻力亦是用对应的经验公式求解,其表达式如式(5)所示。
式中:g为重力加速度;BC为标高差;AB为坡道长度;θ为坡道和水平方向的夹角。
式中:R为曲线半径;g为重力加速度。
式中:Ls为隧道长度。
1.2 多目标评价指标
本文建立4个目标的评价模型。
1.2.1 安全评价指标
高速列车在运行过程中的安全主要体现在不超速运行,其安全评价模型M为
式中:V(l)为高速列车当前位置l所对应的限速;v为当前列车的运行速度;M越小代表其安全性越高。
1.2.2 节能评价指标
将运行线路划分为数个区段,每段对应着不同的牵引/制动力和走行距离,乘积得到每个区段的能耗,所有区段的累加就是总适应度值[14]。其节能评价模型E为
式中:Ui为当前区段的控制力;ΔSi为当前区段的走行距离。
而在列车运行过程中,轮对与钢轨之间的黏着系数会随着蠕滑速度不断改变。如图2所示,黏着系数会随着轮轨间的蠕滑速度先增大到一个峰值点,也就是最大黏着系数,之后再减小。在峰值点处轮轨可以传递最大的牵引/制动力,也就是达到了最优黏着利用。峰值点左边为黏着区,在这部分轮轨间处于黏着状态,车轮不会打滑,力得到了很好的发挥;峰值点右边为滑动区,在这部分车轮会发生打滑现象,这时牵引/制动力是无法使用的[15]。
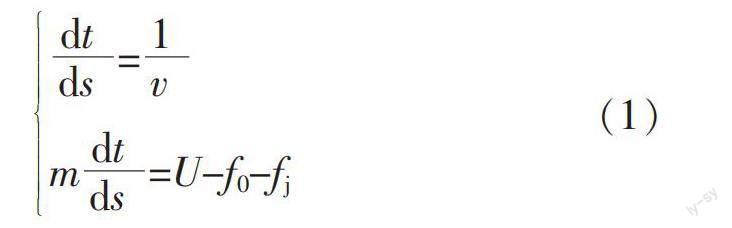
为了保证牵引/制动力得到充分利用,防止能源浪费,应尽可能的让列车轮轨黏着状态处于峰值点或左侧黏着区。而在运行过程中,列车会经过不同的路况,对应着不同的最大黏着系数[16]。本文考虑是否能在节能模型中加入黏着力的影响,将牵引/制动力超出当前路况的最大黏着力的部分视为浪费,对超出的部分进行优化,使其尽可能的减小,以此达到节能的目的。为了验证这个想法,本文在仿真中将实验线路按照里程均分为三段,分别对应雨雪,潮湿,干燥三种轨面状态,对应的黏着系数可通过式(8)求得。
式中: a、b、c为轨面系数;v为蠕滑速度。
通过大量实验,学者们计算出不同轨面状态下的轨面系数,再根据数学公式求出对应的最大黏着系数和黏着特性曲线如表1、图3所示[17]。
根据表1可知在雨雪、潮湿、干燥三种轨面状态下的最大黏着系数,接着利用式(9)求出对应的最大黏着力,表达式如下
式中:μ为黏着系数;m为列车质量; g为重力加速度。
综合上述分析,本文对原先的节能评价模型提出改进,在计算原有能耗的基础上再考虑当前路况下最大黏着力对于消耗能源的影响。首先求出列车当前时刻所处公里标、运行速度和运行工况;然后计算出对应的最大黏着力、牵引/制动力;接着对前者超出后者的部分进行优化,使其尽可能减小。改进后的节能评价模型表达式如下
式中:Ui为当前区段的牵引/制动力;Fa为当前区段对应的最大黏着力;ΔSi为当前区段的走行距离。
1.2.3 正点评价模型
以列车运行时间与运行图给定的站间运行时间的差值作为正点评价指标,其正点评价模型为
式中:T0为运行图给定的站间运行时间;Tu为列车运行时间,两者越接近越好。Ti为正数代表提前到站,负数代表晚点到站。
1.2.4 舒适评价模型
以两个相邻区段的加速度的差值作为舒适度评价指标,其舒适评价模型为
式中:ai为第i个区段的加速度;K越小说明加速度变换的越慢,旅客的舒适度越高。
综上,高速列车运行过程多目标优化模型如下
式中:t为列车当前运行时间;s为列车当前位置;v为列车当前运行速度;m为列车的质量;U为电机施加的控制力(U>0为牵引力,U<0为制动力);f0 为基本阻力;fj为附加阻力;V(l)为高速列车当前位置 所对应的限速;a为列车当前加速度;amax为允许的最大加速度;V(0)为列车在起点的起始速度;V(S)为列车在终点的最终速度;G(·)为多目标适应度函数;式(14)为模型约束。
2 基于参考点的非支配排序的高速列车多目标优化算法
目前已存在多种多目标优化算法,并在高速列车领域中展示了它们在处理两个或三个目标上的优势。随着高速列车行车密度与驾驶速度不断增加,列车运行过程中需要优化的目标也随之增加,传统的优化算法已经不足以解决新出现的问题,现在越来越需要开发出多目标优化算法来处理多目标(4个或以上目标)优化问题。为此,本文选取基于参考点的非支配排序的优化算法(NSGA-Ⅲ)进行仿真优化。
NSGA-III算法[18]在带精英策略的非支配排序遗传算法(NSGA-Ⅱ)的基础上提出改进。NSGA-Ⅱ算法[19]引入精英策略提高了种群个体的质量,引入拥挤距离保证了种群个体的多样性,并利用快速非支配排序降低计算的复杂度。然而本文有4个需要优化的目标,需要选择具备处理4个或以上目标能力的优化算法。同时,当目标函数数量超过三个时,拥挤距离的计算成本较高,计算量极大,NSGA-Ⅲ算法在搜索前已经根据偏好设置好了搜索方向,有效地缩小了多维搜索空间的范围,极大地降低了算法运算量的同时提高了算法的收敛性。最重要的是在高速列车运行曲线优化中,对每个优化目标会存在不同程度地期望偏好,而NSGA-Ⅲ算法会根据实际需求设置参考点和参考向量,以此达到有偏好的优化,更适用于高速列车优化的背景和本文所构建模型的求解。
2.1 数值求解方法
根据NSGA-Ⅲ优化算法的基本思想,结合高速列车行驶中的实际情况,本文将227.78 km的实验线路按照线路坡道变化,划分为0.7~0.8 km长度不一的304个区段,一个区段只能存在一种运行工况并始终保持匀速运行。仿真中每隔0.1 s更新列车的运行速度、所处的公里标和控制工况,结合图1求出当前列车的牵引/制动力。算法中将划分的各个区段作为单个个体,对其进行优化,并根据4个目标的适应度值判断优化是否成功。
基于上述的分析,高速列车运行过程多目标优化算法,具体步驟如下[20]。
Step 1 初始化参数,包括种群数量、迭代次数、交叉率、变异率等,设置结构体存放参数。
Step 2 种群初始化。根据实际线路数据和高速列车相关参数生成50组控制工况序列,判断其是否符合实际驾驶情况,并计算每组的适应度值和平均适应度值。
Step 3 从50组中选出总适应度值最小的一组作为初始工况序列,作为初始种群P,记录4个优化目标的适应度值,并生成参考点。
Step 4 对种群P进行交叉、变异操作,得到另一个种群Q,检测其控制工况序列是否符合实际驾驶情况,并计算4个优化目标的适应度值。
Step 5 合并种群P和种群Q,得到两倍个体数量的新种群M;
Step 6 将新种群M进行快速非支配排序,得到5个非支配层F1、F2、F3、F4、F5;
Step 7 优先从支配等级高的非支配层中的个体选出下一代种群,若F1、F2、F3、F4、FL(L≤5)层中的个体总数恰好为N,则将以上非支配层中的个体选作下一代种群,同时迭代次数增加1,执行Step 9;若F1、F2、F3、F4、FL(L≤5)层中的个体超过N,则先选择F1、F2、F3、F4、FL(L≤5)层中的个体作为下一代种群,剩余的个体执行Step 8进行选择;
Step 8 计算层中每个个体与参考点的差值,按照从小到大的顺序依次放入下一代种群,直到数量刚好等于N,则不再选择个体,生成新种群,同时迭代次数增加1;
Step 9 判断是否达到设定的迭代次数,若是则终止迭代;否则重复 Step 4至Step 8。
3 仿真实验结果分析
为了验证提出的基于参考点的非支配排序优化算法(NSGA-Ⅲ)的改进模型对于高速列车运行过程多目标优化的有效性,本文以京沪高铁线路上运营的CRH380AL高速列车为实验对象,基于“泰安—徐州东”的实际运行数据进行仿真实验,先将改进前后模型的优化结果进行对比,验证模型的有效性;再将GA算法、NSGA-Ⅱ算法与NSGA-Ⅲ算法的优化结果进行对比,验证方法的可行性。
仿真区段线路基本参数如表2所示[21]。表2中:v为列车当前运行速度;an为常用制动时运行速度小于300 km/h时的减速度;Sn为常用制动时运行速度小于300 km/h时的制动距离;ae为紧急制动时运行速度小于300 km/h时的减速度;Se为紧急制动时运行速度小于300 km/h时的制动距离。
3.1 实验结果及分析
图4给出了CRH380AL高速列车某次在“泰安—徐州东”区间内运行的速度-里程(V-S)曲线。其中,两站间的距离为227.78 km,运行图中给定的站间运行时间为3 088 s,可接受的提前/晚点范围为120 s[22]。
根据实际线路中的相关数据,计算出初始条件下4个目标的适应度值,如表3所示。
结合图4和表3可知列车运行过程中仍存在优化空间。例如对于安全目标,列车在制动过程中速度几乎接近当前路段的限制速度,存在很大的安全隐患;对于正点目标,速度过高导致时间超过了可接受的范围;对于节能目标有很大的改善空间。
为了提高列车运行过程中的整体效果,本文中在考虑轮轨间黏着的基础上,对节能评价模型作出了改进,并使用NSGA-Ⅲ算法对4个目标进行仿真实验,得到优化后的速度-距离曲线如图5所示。
优化仿真过程中进行了100次算法迭代,其总适应度值变化如图6所示。
将迭代100次后的结果进行计算,得到优化后的四项评价指标参数值,如表4所示。
通过图6可以直观地看出,列车在制动过程中,优化后的制动速度远远低于当前路段的限制速度,安全性能大大增加。对比表3表4可知,优化后所有的评价指标均得到提升,运行曲线安全性更高、能耗减少了一半左右、到站时间更接近运行图给定的站间运行时间、舒适度也大幅度提升。为了进一步说明本文方法的有效性,下面将从模型和算法两个方面进行对比。
3.2 模型的对比
改进的节能评价模型为式(6),在式(3)的基础上考虑了不同轨面的黏着系数,将牵引/制动力超出最大黏着力的部分视为能源浪费进行优化,以此达到更好的节约能耗效果。为了验证改进模型的有效性,接下来用未改进的节能评价模型进行优化,得到结果如下所示。
通过表5可以得出,未改进的节能评价指标比改进后的节能评价指标增加了20.76%,总适应度值增加了14.38%。仿真结果说明改进后的节能模型降耗成效显著,考虑不同轨面状态下的黏着力对提高能源开发利用、有效抑制不合理的能源浪费至关重要。
3.3 算法的对比
为了验证NSGA-Ⅲ算法是否适用于优化高速列车运行过程中的目标曲线,本文选择GA算法与NSGA-Ⅱ算法作为对比对象,从收敛速度、收敛结果两个方面进行比较,以此验证NSGA-Ⅲ算法的可行性。
根据上述优化结果可以看出:从评价指标来判断,NSGA-Ⅲ算法的精度明显要高于 NSGA-Ⅱ算法和GA 算法,且收敛速度更快。NSGA-Ⅱ算法容易陷入局部最优,全局寻优能力低于NSGA-Ⅲ算法。这说明NSGA-Ⅲ算法相较于其他两种算法具有显著的优越性。
4 结论
针对高速列车运行过程中的多目标优化问题,本文分析了列车受力情况,在满足区间固定限速以及车辆动力学方程约束的条件下,建立了行车安全、包含不同轨面状况下最大黏着力约束的能源消耗、准点到站、旅客乘坐的舒适度等4个评价指标,构成高速列车运行过程多目标优化模型。结合高速列车运行过程中的行车特点,选择基于参考点的非支配排序算法优化目标曲线。仿真中以“泰安—徐州东”站间为基础数据,对初始的实际线路进行优化,最终结果优化后4个评价指标都有所提升,尤其是节能评价指标。并且为了说明本文方法的有效性和可行性,在模型和算法方面均做了对比,结果显示本文改进的节能模型对于降耗有着显著作用,考虑轮轨间的黏着对于高速列车多目标优化有極大的帮助;NSGA-Ⅲ算法在收敛速度和收敛效果都有极大的优势,非常适用于高速列车优化的实际领域。
参考文献:
[1] 宋鸿宇,上官伟,盛昭,等. 基于弹复力调整的高速列车群动态运行轨迹优化方法[J]. 交通运输工程学报,2021,21(4):235-250.
SONG H Y,SHANGGUAN W,SHENG Z,et al. Optimization method of high-speed train group dynamic operation trajectory based on resilience adjustment[J]. Journal of Transport Engineering,2021,21(4):235-250.
[2] GU Q,TANG T,CAO F,et al. Energy-efficient train operation in urban rail transit using real-time traffic information[J]. IEEE Transactions on Intelligent Transportation Systems,2014,15(3):1216-1233.
[3] 闫璐,张琦,丁舒忻,等. 基于双目标优化的高速铁路列车运行调整[J]. 中国铁道科学,2022,43(2):161-171.
YAN L,ZHANG Q,DING S X,et al. High speed railway train operation adjustment based on double objective optimization[J]. China Railway Science,2022,43(2):161-171.
[4] 贾宝通,孟学雷,贾飞,等. 面向节能的高速列车追踪控制方案研究[J]. 铁道科学与工程学报,2021,18(8):1986-1996.
JIA B T,MENG X L,JIA F,et al. Research on energy-saving oriented high-speed train tracking control scheme[J].Journal of Railway Science and Engineering,2021,18(8): 1986-1996.
[5] YANG X,LI X,NING B,et al. A survey on energy-efficient train operation for urban rail transit[J]. IEEE Transactions on Intelligent Transportation Systems,2015,17(1):2-13.
[6] 徐传芳,陈希有,郑祥,等. 基于动态面方法的高速列车蠕滑速度跟踪控制[J]. 铁道学报,2020,42(2):41-49.
XU C F,CHEN X Y,ZHENG X,et al. Creep speed tracking control of high-speed trains based on dynamic surface method[J]. Journal of Railways,2020,42(2):41-49.
[7] 张京,朱爱红. 基于遗传算法和粒子群优化的列车自动驾驶速度曲线优化方法[J]. 计算机应用, 2022,42(2):599-605.
ZHANG J,ZHU A H. Optimization method of automatic train operation speed curve based on genetic algorithm and particle swarm optimization[J]. Computer Application,2022,42(2):599-605.
[8] 张惠茹,贾利民,王莉. 基于Pareto多目标优化的高速铁路列车节能驾驶曲线集生成[J]. 铁道学报,2021,43(3):85-91.
ZHANG H R,JIA L M,WANG L. Generation of energy-saving driving curve set for high-speed railway trains based on Pareto multi-objective optimization[J]. Journal of Railways, 2021,43(3):85-91.
[9] 李杰. 基于多质点模型的高速列车追踪运行ATO多目标优化研究[D]. 兰州:兰州交通大学,2021.
LI J. Research on ATO multi-objective optimization of high-speed train tracking operation based on multi particle model[D]. Lanzhou:Lanzhou Jiaotong University,2021.
[10] 李斌,楊忠良,罗世辉,等. 考虑轮轨黏着变化的货运列车纵向动力学仿真[J]. 振动测试与诊断,2021,41(6):1059-1065.
LI B,YANG Z L,LUO S H,et al. Longitudinal dynamics simulation of freight train considering wheel rail adhesion change[J]. Vibration Testing and Diagnosis,2021,41(6): 1059-1065.
[11] 吴业庆,赵旭峰,喻励志,等. 基于最优蠕滑辨识的高速列车黏着控制研究[J]. 机车电传动,2020(2):12-16.
WU Y Q,ZHAO X F,YU L Z,et al. Study on adhesion control of high-speed trains based on optimal creep identification[J]. Electric Drive of Locomotive,2020(2):12-16.
[12] WU B,XIAO G,AN B,et al. Numerical study of wheel/rail dynamic interactions for high-speed rail vehicles under low adhesion conditions during traction[J]. Engineering Failure Analysis,2022,137:106266.
[13] XIAO G,WU B,YAO L,et al. The traction behavior of high-speed train under low adhesion condition[J]. Engineering Failure Analysis,2022,131:105858.
[14] 赵辉,代学武. 基于闭塞区间的高速列车运行时间与节能协同优化方法[J]. 自动化学报,2020,46(3):471-481.
ZHAO H,DAI X W. Collaborative optimization method of high-speed train operation time and energy saving based on block section[J]. Acta Automatica Sinica,2020,46(3):471-481.
[15] WU B,WU T,AN B Y. Numerical investigation on the high-speed wheel/rail adhesion under the starved interfacial contaminations with surface roughness[J]. Lubrication Science,2020,32(3):93-107.
[16] SHI L,MA L,GUO J,et al. Influence of low temperature environment on the adhesion characteristics of wheel-rail contact[J]. Tribology International,2018,127:59-68.
[17] 李中奇,张俊豪. 基于快速自适应超螺旋算法的高速列车最优黏着控制[J]. 铁道科学与工程学报,2022,19(8):2143-2150.
LI Z Q,ZHANG J H. Optimal adhesion control of high-speed trains based on fast adaptive super spiral algorithm [J]. Journal of Railway Science and Engineering,2022,19(8):2143-2150.
[18] DEB K,JAIN H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach[J]. IEEE Transactions on Evolutionary Computation,2014,18(4):577-601.
[19] DEB K. Multi-speed gearbox design using multi-objective evolutionary algorithms[J]. Journal of Mechanical Design, 2003,125(3):609-619.
[20] 付雅婷,原俊榮,李中奇,等. 基于钩缓约束的重载列车驾驶过程优化[J]. 自动化学报,2019,45(12):2355-2365.
FU Y T,YUAN J R,LI Z Q,et al. Optimization of heavy haul train driving process based on coupler draft constraint [J]. Journal of Automation,2019,45(12):2355-2365.
[21] LU W,QIN S S,MU Z G,et al. Simulation study on evacuation of CRH380AL high-speed train and its influencing factors[J]. China Safety Science Journal,2020,30(8):164.
[22] 张欣欣. 高速列车运行控制[M]. 北京:北京交通大学出版社,2012.
ZHANG X X. High speed train operation control[M]. Beijing:Beijing Jiaotong University Press,2012.
通信作者:付雅婷(1988—),女,副教授,博士,硕士生导师,青年井冈学者,研究方向为轨道交通优化运行与智能运维。E-mail:fuyating0103@163.com。
(责任编辑:姜红贵)