专创融合背景下机器人专业实验教学模式研究
——以《机器人导航与运动规划》为例
2023-11-14成都大学代华凤
◇成都大学 毛 润 代华凤
在专创融合背景下,为了满足智能制造产业升级对机器人专业人才的需求,本文开展了专创融合背景下机器人专业实验教学模式的研究。当前机器人的实验教学内容松散、单一,无法满足产业发展需求。基于专创融合的人才培养思路,以产业需求为导向,结合成都大学办学条件,按照任务驱动教学模式,设置了体现科学性和研究性的机器人导航与运动规划专题实验项目。实验项目包含从底层控制到上层规划的整体实现,对于学生双创能力的培养起到很好的促进作用。
党的十九大明确提出高等教育要实现内涵式发展,深化产教融合[1]。实验教学作为培养学生创新创业能力的重要抓手,对于学生熟练掌握相关专业知识起到很好的促进作用[2]。传统机器人运动规划实验课程,学生一般按照实验手册编写各种类型的运动规划算法,这样学生很难掌握机器人的底层运行机理。另外,实验内容较为单一,没有与生产实践相结合,这样培养的学生无法适应当前的产业需求。专创融合的本质是将双创教育融入到专业课程当中[3],引导学生运用专业知识发现问题和解决问题,培养学生实践动手和创新创业能力。《机器人导航与运动规划》这门课程是机器人工程专业的一门专业核心课程,教学内容包括机器人的运动学及控制、机器人定位技术、路径规划算法等。该课程与自动控制理论、嵌入式系统、C语言等课程密切相关,实践性和应用性非常强。根据我校的办学定位,为了更好服务地方人才需求,因此课程内容不仅要包含机器人运动规划相关内容,还要注重培养学生的实践能力和创新能力,使得学生毕业后能适应智能制造产业升级的发展需求,并能解决机器人产业应用中的一些实际问题。
1 专创融合背景
专创融合的本质是将双创教育融入到专业课程当中[3-5],引导学生运用专业知识发现问题和解决问题的能力,培养学生实践动手和创新创业能力。移动机器人导航与运动规划这门课程设置了32学时的实验课,包含全向轮小车运动学建模、3D建图导航和运动规划三个实验项目,这三个项目包含了移动机器人从底层控制到上层规划的整体实现。相比传统的实验教学,该实验设计上具有连贯性,学生能够通过学习,完全掌握移动机器人的整个开发流程。另外,全向轮小车广泛应用于医疗设备、物流设备、仓储、生产流水线、大型超市等众多行业,选择其作为实验对象,培养出的学生能够很好适应当前的产业需求[4-5]。
2 综合型实验方案与实验体系设计
为了培养学生的“双创”意识与能力,在机器人运动规划与导航实验教学中引入建构主义教学理念和任务驱动等以学生为中心的主动探索性教学模式,设计了模块化的综合性实验教学项目。
2.1 全向轮小车运动学建模
机全向轮小车由三个或以上麦克纳姆轮按照一定的排列方式组成的移动平台具有平面内三个自由度,可以独立的前后、左右移动和原地旋转[6]。可在不改变自身位姿的情况下向任意方向移动。其广泛应用于医疗设备、物流设备、仓储、生产流水线、大型超市等众多行业。对全向轮小车运动学建模是控制的第一步,在建模之前,为了简化运动学数学模型,做出以下几种理想化假设:①全向轮不打滑;②电机轴线中心与底盘重心重合;③各轮之间角度为120°。通过简单的速度分解,可知:
2.2 3D建图导航实验
全向轮小车3D建图导航功能主要是通过视觉slam结合激光slam的方式来实现的,视觉建图与激光雷达建图并行,最终由rtabmap进行整合[7]。如图1所示,建图效果在rviz中的呈现就是既有2D平面地图,又有立体图像效果,因此该功能所呈现的效果为3D效果。RTAB-MAP采用离散贝叶斯过滤器来估计形成闭环的概率,将新的定位点与存储在工作内存中的定位点进行比较。当发现新旧定位点之间有一定概率形成闭环时,新旧定位点就链接到一起。其中涉及两个步骤,一个是取回:当闭环概率最高的那个定位点的邻接定位点不在工作内存时,从静态内存取出放回工作内存;二是转移:当闭环检测的处理时间超过阈值,在最低权重的定位点中,存储时间最长的将被转移到静态内存中去。

图1 全向轮小车3D建图
2.3 运动规划算法实验
运动规划的目的是根据实时地图环境,规划出一条从起始点到目标点的路径。本实验让学生实现两种经典的运动规划算法Dijkstra算法[8]和 A*算法[9]。如图2所示,Dijkstra算法是从一个顶点到其余各顶点的最短路径算法,解决的是有权图中的最短路径问题,采用贪心算法的策略,每次遍历到起始点距离最近且未访问过的顶点的邻接节点,直到扩展到终点为止。
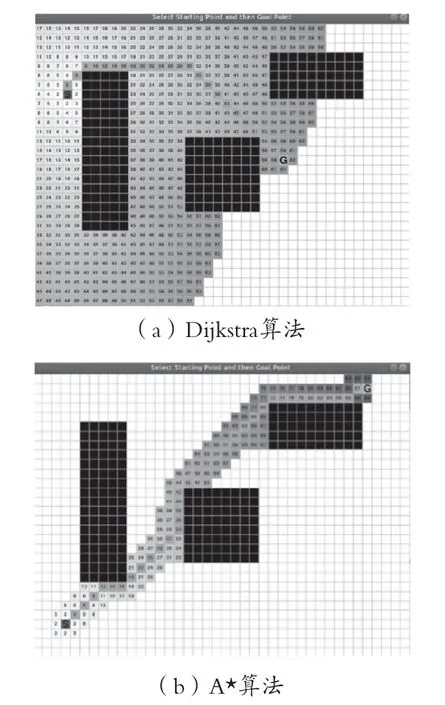
图2 运动规划算法效果对比
A*算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。首先把搜寻区域简化为一组可以量化的节点后,下一步要做的便是查找最短路径。在A*中从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。A*算法与Dijkstra算法的不同之处在于A*算法是一个“启发式”算法,它已经有了一些先验知识。它不仅关注已走过的路径,还会对未走过的点或状态进行预测。因此A*算法相比Dijkstra而言调整了进行广度有限搜索的顺序,少搜索了那些“不太可能经过的点”,更快地找到目标点的最短路径。
实验过程中,学生提前通过查阅相关文献,了解两种算法思想。然后理论上分析两种算法的时间复杂度,并通过实践对比两种算法效果,能够深入了解机器人运动规划的工作原理。
3 实验效果评价
机器人运动规划与导航综合性实验目的是为了培养学生“双创”能力,熟悉机器人从底层控制到上层规划的整体设计能力。教师将学生分为3人一组的实验小组,每个小组在实验之前需提前预习实验指导书、自主查阅相关文献资料,小组内部交流并设计实验方案。实验前,需将实验方案提交给教师进行审核,判断实验方案的可行性,并对实验方案提出修改意见。实验实施阶段,以学生为主体,以实现实验目标为导向,培养学生的创新能力与解决实际问题的能力。各小组实验过程中,通过分工合作完成实验内容,实现相关机器人相关功能和性能,并如实记录实验过程中的关键数据和参数。实验总结阶段,要求学生对实验过程中的数据进行整理分析,对比不同算法不同参数的实际表现,并撰写实验报告。实验成绩由实验预习成绩(30%)和实验报告成绩(70%)两部分构成。学生通过这一系列完成的机器人项目的过程中,掌握了解决问题的方法,同时对“双创”能力的提高起到了促进作用。依托这个实验项目,多名学生组队参加了中国机器人及人工智能大赛、中国高校智能机器人创意大赛,并取得了优异的成绩。
