基于滑窗DFT的海上光伏发电并网逆变器电流控制方法
2023-11-13王英林付佳宇
陶 蕾,王英林,付佳宇
(中国电力工程顾问集团华北电力设计院有限公司,北京 100120)
0 引言
近些年来,清洁能源应用更加广泛,为人们的用电环境提供了保障。光伏发电是众多清洁能源中使用最多的能源,对于电能的稳定使用具有重要作用。现如今,海上运输较多,大型货物在海上运输的时间甚至超过了陆地上运输的时间。因此,海上光伏发电也受到了广泛关注。但是,光伏发电同样存在隐患,当遇到阴雨天气时,发电稳定性不佳,很容易影响海上运输效果。针对以上问题,研究人员设计了多种方案,以控制逆变器电流的方式,确保发电稳定性。
有研究人员提出基于有源阻尼电流观测器的并网逆变器无电流传感器反馈控制方法。主要是以闭环控制为主,逆变电流出现故障之后,利用相应的模型重构电流,控制电流重构过程变量与电压变量,从而保证电流的稳定输出[1]。还有研究人员提出基于扰动观测器的海上光伏发电并网逆变器电流控制方法,主要是抑制负载电流扰动,处理电流中的稳态误差,从而实现电流的跟踪控制[2]。虽然以上两种方法均能够满足对逆变器电流控制的需求,但是在进行电流控制的过程中容易受到其他因素的影响,逆变器出现快速反应会导致电流参考值会出现大幅度变化,使得逆变器出现稳态偏差,导致电流控制效果不佳[3]。
为了解决上述方法存在的不足,本文在滑窗DFT 的条件下,设计了海上光伏发电并网逆变器电流控制方法。
1 海上光伏并网逆变器电流的滑窗DFT控制方法设计
1.1 确定海上光伏并网逆变器电流控制参数
船舶在海上运行时,海域面积辽阔,太阳能够从早到晚地广角照射,保证发电的稳定性[4]。光伏电压在各个发电单元的并网公共点高压侧,受到线路阻抗、光照强度、逆变器等因素的影响[5],并网电压很容易出现大幅度的波动,降低发电稳定性[6]。电网阻抗会造成并网逆变器的电流变化,逆变器的性能逐渐失稳,电流谐波减小,产生的电流谐波引起的谐振问题,是影响逆变器电流控制的主要因素[7]。本文根据海上发电的实际情况,确定逆变器的相关技术参数,如表1 所示。其中,Udmax为最大光伏列阵输入电压;Ud为MPPT 电压范围;Pout为逆变器交流输出功率;Uab为并网电压有效值;f1为电网频率;fs为逆变器开关频率[8]。一般情况下,允许电网电压Uab的范围为210~310 V,总电流波形畸变率小于5%,即可保证电流稳定性[9]。

表1 逆变器相关技术参数
根据逆变器相关技术参数的变化情况,确定出电流控制参数如下:
式中:Δimax为电流控制参数;Ts为逆变器载波周期;L为逆变器的等效电感。
通过Δimax的变化情况,将电感与电容功率缩小,增加并网电流的控制能力,电流波动畸变率在允许范围内的基础上,限制L,从而满足发电并网电流控制条件[10]。
1.2 基于滑窗DFT消除光伏发电并网逆变电流谐波
滑窗DFT 是一种谐波电流分析方法,逆变器电流控制过程中,仅依靠控制参数无法保证电流控制效果[11]。因此,本文利用滑窗DFT,消除光伏发电并网逆变电流谐波。对于任意的逆变器电流信号n(x),其滑窗迭代周期为X,周期采样个数为N,采样周期表示为s=X∕N,则光伏发电逆变电流的离散变化表示为:
式中:n(ks)为光伏发电逆变电流的离散变化表达式;a0为初始采样点的电流数据;an为第n个采样节点的电流数据;λ为离散参数;k为常数;s为采样周期;bn为第n个采样节点出现的谐波电流数据。
引入滑窗DFT 算法之后,直接将an数据作为最新的电流数据进行分析,同时淘汰a0,提升电流谐波检测效率。滑窗DFT 迭代算法原理如图1 所示。由图可知,旧值就是电流初始数据;旧电流数据就是前5 次采集的电流数据;新电流数据就是最近5次采集的电流数据[12]。
引入滑窗DFT迭代算法之后,改进an与bn,公式如下:
式中:Nnew为最新的电流采样点;n(is)为第i个采样周期前的采样数据。
在一个完整的采样周期内,采样数据经过与之对应的旋转因子存储在连续空间中。在此空间内对不适合的瞬时谐波进行检测,保证负载电流的控制能力[13]。本文对最新采样数据进行谐波检测,谐波信号表示为:
式中:n′(ks)为最新电流数据中的谐波信号。
由于电流采样频率较高,计算量较大,本文使用了滑窗迭代简化计算步骤[14]。当一个完整的采样周期采样数据更替之后,滑窗循环指针回到初始位置,开始下一周期的数据循环更替,通过减、加等运算,即可完成谐波消除的迭代工作[15]。在谐波消除完毕之后,本文构建了逆变器电流有源阻尼控制模型,消除连续域内的不稳定极点,从而稳定离散域的电流。模型表达式如下:
式中:D[n′(ks)]为逆变器电流有源阻尼控制模型表达式;ρ4、ρ3、ρ2、ρ1为离散域内的异变电流极点;m4、m3、m2、m则分别为ρ4、ρ3、ρ2、ρ1的离散因子。
通过控制模型,将异变电流极点消除,从而确保逆变器的电流控制效果。
2 仿真实验
为了验证本文设计的电流控制方法是否具有使用效能,本文对上述方法进行了实验。受到海上发电的局限性,本文在实验室内模拟出海上发电环境,利用追光控制系统,将太阳高度角与方位角还原成海上发电情况,保证本次实验的有效性。在海上环境仿真完成之后,分别使用文献[1]基于有源阻尼电流观测器的海上光伏发电并网逆变器电流控制方法、文献[2]基于扰动观测器的海上光伏发电并网逆变器电流控制方法,以及本文设计的基于滑窗DFT 的海上光伏发电并网逆变器电流控制方法,对逆变器电流作出控制。实验具体过程以及最终的实验结果如下所示。
2.1 实验过程
在本次实验中,采用了Matlab∕Simulink 仿真软件,搭建出海上光伏发电仿真模型。模型主要是由两个光伏发电单元和SVG 组成,逆变器选用LCL 滤波控制参数,电流控制参数保持为设定值,电压控制点选在变压器10 kV 母线侧,保证本次实验的有效性。海上光伏发电仿真模型如图2 所示。图中,A1、A2、A3、A4、A5 为变压器仿真模型;M1、M2、M3 为线路仿真模型;SVG 为无功补偿器。

图2 海上光伏发电仿真模型
使用上述仿真模型,并分别模拟出晴天、阴天、雨天、风天的光照强度在一天的变化情况。光照强度的模拟时间为9:30-17:30,并根据光照情况设定变压器的模型参数。变压器参数如表2所示。

表2 变压器参数
M1 的线路长度约15 km,电压约0.27 kV,电阻为0.008 2 Ω∕km,阻抗参数约为3.66×10-6H∕km。M2 的线路长度约10 km,电压约为0.27 kV,电阻与M1相同,阻抗参数与M1 一致。M3 的线路长度约100 km,电压约10 kV,电阻约0.270 Ω,阻抗参数为2.50×10-3H∕km。根据上述给定的变压器参数与线路参数,令逆变器处于正常运行状态,光伏发电维持在低压侧10 kV母线附近的无功补偿容量约为850 kvar。考虑到逆变器的实际运行情况,将SVG的无功补偿容量设定为500 kvar,由此确保逆变器的运行状态。
2.2 实验结果
在上述实验条件下,本文随机选取了多个正常运行的逆变器,其标准电流一致。本文以正常运行的逆变器电流作为标准,在海上光伏发电并网逆变器运行的0.5~1.0 s 之内,对其电流进行控制。分别使用文献[1]基于有源阻尼电流观测器的海上光伏发电并网逆变器电流控制方法、文献[2]基于扰动观测器的海上光伏发电并网逆变器电流控制方法,以及本文设计的基于滑窗DFT 的海上光伏发电并网逆变器电流控制方法,对逆变器电流作出控制,控制过程中逆变器电流变化情况如图3所示。
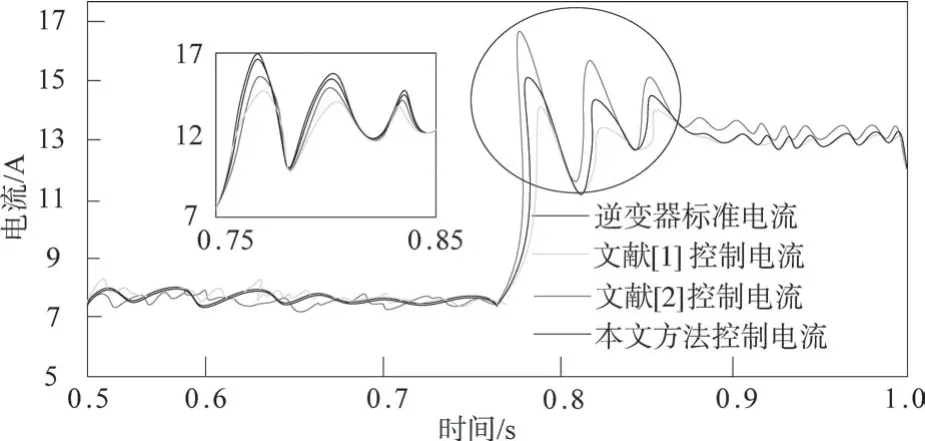
图3 实验结果
由此可知,在海上进行光伏发电的过程中,电压存在稳态偏差,电压波动较大,逆变器电流波动随之增加。使用文献[1]基于有源阻尼电流观测器的海上光伏发电并网逆变器电流控制方法之后,将逆变器的电流作出重构,减弱发电并网的稳态偏差,虽然具有一定的效果,但是逆变器电流控制效果与标准电流之间存在微弱差异,很容易出现逆变器电流波动幅度增加,从而发生故障,影响海上发电效果。使用文献[2]基于扰动观测器的海上光伏发电并网逆变器电流控制方法之后,将逆变器的采样电流进行了稳态控制,在逆变器运行的0.5~1.0 s 之内,功率阶跃响应效果更佳,对于电流控制具有一定的效果。但是,该方法主要针对逆变器的功率控制,实际运行时的电流与标准电流仍存在误差,亟须进一步改进。使用本文设计的基于滑窗DFT 的海上光伏发电并网逆变器电流控制方法之后,是将逆变器电流进行闭环控制,在消除电流谐波的基础上,减弱逆变器的稳态偏差,控制的电流与标准电流基本保持一致,能够实现电流的有效控制。由图3可知,本文方法控制的电流与标准电流相差无几,更适合应用在海上光伏发电并网逆变控制,符合本文研究目的。
3 结束语
使用光伏发电解决了海上发电的难题,对于海运模式的发展具有重要作用。但是现阶段海上光伏发电并网逆变器电流容易出现谐波问题,是影响海上光伏发电的主要因素。现有的逆变器电流控制方法存在会导致电流参考值会出现大幅度变化,使得逆变器出现稳态偏差,电流控制效果不佳。为此本文利用滑窗DFT 技术,设计了海上光伏发电并网逆变器电流控制方法。从控制参数、谐波电流、控制模型等方面,对逆变器电流进行控制,并通过实验验证该方法可在消除电流谐波的基础上,减弱逆变器的稳态偏差,控制的电流与标准电流基本保持一致,能够实现电流的有效控制,真正意义上提高海上光伏发电质量。
