去纸机器人在深加工玻璃生产中的应用
2023-11-11王东夏永恒邢奇平于阳阳
王东 夏永恒 邢奇平 于阳阳
(海控三鑫(蚌埠)新能源材料有限公司 蚌埠 233000)
0 引言
随着人工成本的日益增加,如何降低人工成本已经成为每个企业降本增效的关键所在。通过对产线自动化的优化改造降低人工成本已经成为企业发展过程中重点考虑的问题之一。在玻璃堆垛过程中,为了防止玻璃之间发生滑移,通常每放置一片玻璃,都会铺一张纸,以防止玻璃在运输工程中发生滑移造成玻璃损伤。在玻璃深加工过程中,需要对玻璃和铺纸进行分离、分配。常用的机械手无法单独完成玻璃与铺纸的分离分配,目前大多数企业采用人工抬片去纸以及机械夹纸的方式。一架玻璃存放架上玻璃板的数量均在100片以上,人工抬片去纸费时费力,抬片时无法及时精确地将玻璃放置到深加工输送线的辊道上,影响玻璃二次加工的效率;机械夹纸去纸的方式容易划伤或损坏玻璃,并且夹纸去纸后铺纸无法二次利用,造成浪费。自动去纸机器人的研发与改进有利于提高生产效率,精减人员,达到降本增效的目的。
1 自动去纸机器人
自动去纸机器人机械结构如图1所示。
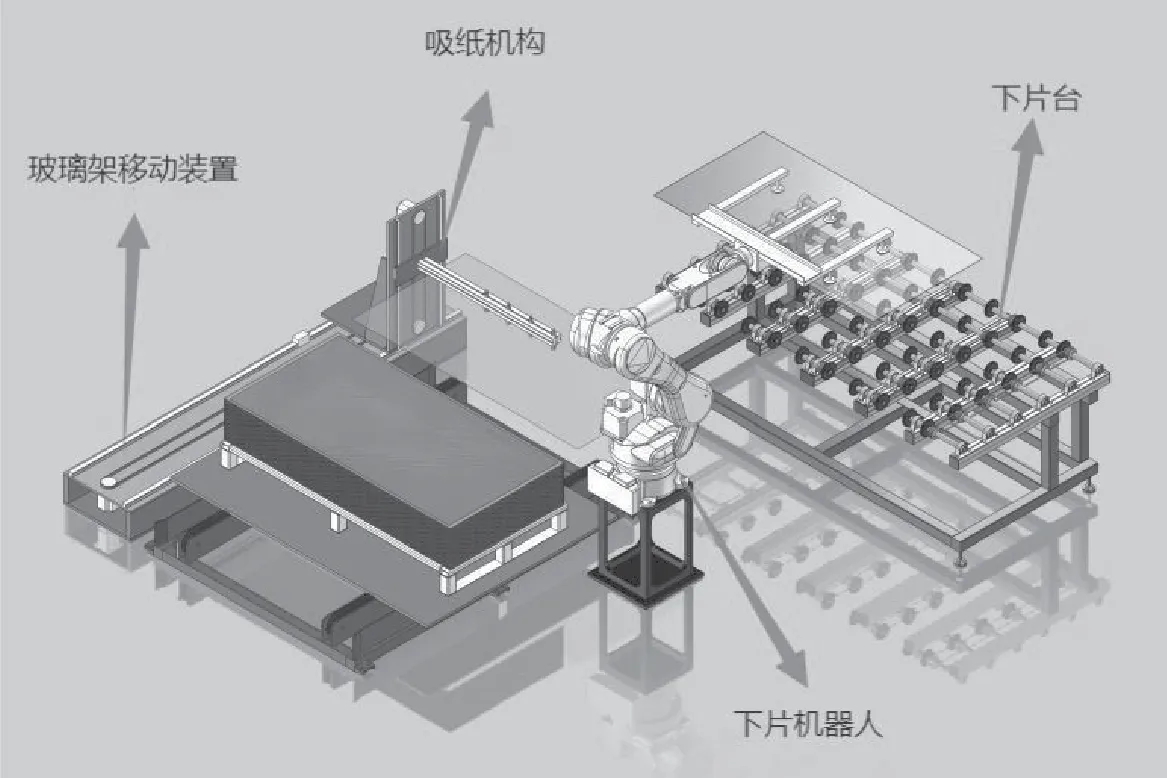
图1 自动去纸机器人机械结构
自动去纸机器人装置由下片机器人、下片台、吸纸机构、玻璃架移动装置等四部分组成。其中下片机器人由机器人、真空泵、真空吸盘、光电开关以及吸盘架组成。下片台由玻璃输送辊道、传动电机、光电开关等设备组成。吸纸机构由吸纸架、水平传动装置、纵向传动装置以及玻璃架进料装置组成。吸纸架由真空吸盘、色标传感器、传感器固定型材组成,主要用于玻璃/纸张的检测以及纸张的去除。水平传动装置由传动电机、传送皮带、滑轨以及安装纵向传动装置的滑架组成。纵向传动装置由传动电机、滑轨、传动皮带以及吸纸架组成,用于吸纸架的移动,使吸纸架上吸附的纸张能够准确地落入到储纸箱内。玻璃架移动装置由传动电机、传动链条、限位开关、玻璃架支撑板组成,用于待去纸玻璃移动到固定位置,方便机器人以及去纸机构正常工作。
1.1 检测原理
自动去纸机器人通过利用色标传感器的工作原理来检测纸张或玻璃。在机器人和吸纸机构上均配备色标传感器,利用色标传感器检测当前物品的材质是纸或是玻璃,当检测到是纸张时,吸纸机构开始工作,将纸张吸住并抽走。在纸张抽走后,反馈一个取纸完成的信号给机器人,机器人开始抓取玻璃,当玻璃抓取动作完成后,反馈信号给传感器,重复当前的检测操作。
1.2 工作原理
工人将需要去纸的玻璃架放在输送带上,当玻璃架到达设定位置后,机器人回原点,吸纸机构回原点,在触摸屏上设置玻璃架上的玻璃数量、玻璃规格尺寸,在触摸屏上点击自动/手动模式,色标传感器开始工作,检测到玻璃后,机器人开始抓取玻璃,放到玻璃传送辊道上,当玻璃传送辊道上的传感器检测到玻璃后,玻璃计数加1。机器人每次抓取下降高度=初始位置+吸走玻璃片数×每片玻璃厚度。每次吸走玻璃放到深加工流水线完成一次动作,此完成信号反馈给吸纸机构,然后机器人回到等待位置。
吸纸机构悬臂开始运动,运动到玻璃架原点位置(在玻璃架靠近储纸箱一侧设置一个限位开关)后,吸纸机构的悬臂下降到位,真空吸盘开始工作,完成吸纸,吸纸机构的纵向移动电机与横向移动电机开始工作;纵向、横向伺服电机采用两轴控制,保证悬臂在运动过程中呈一条直线。当悬臂在运动到储纸盒的限位处时,吸纸气缸开始缩回,释放真空,此时吸纸次数加1,纸会自动落到放纸的箱子里,吸纸伺服每次下降的高度就是初始位置+吸走玻璃片数×每片玻璃厚度,当实际吸走玻璃数量等于设定玻璃片数量时,机器人停止吸玻璃,回到原始位置。实际吸纸数量等于设定值时,吸纸机构停止吸纸,吸纸机械手回到原始位置。
1.3 报警原理
吸纸机构采用真空吸盘来吸取纸张,在吸取纸张的过程中,传感器检测到纸张,吸纸机构开始工作。在吸纸过程中,通过压力传感器反馈压力信号,当真空发生器故障或者吸盘破损导致负压压力长时间达不到设定值时,信号反馈给PLC,PLC执行外部声光报警。在吸纸完成后纸张抽取过程中,真空压力达不到设定值,信号也会反馈给PLC,PLC执行外部声光报警。
吸纸机构在纸张检测过程中,当传感器检测到纸张破损,信号反馈给PLC执行外部声光报警,通知操作人员处理,并同时停止设备。当操作人员处理完破损纸张后,通过操作台上的复位按钮,复位设备。
由于纸张是被剪切过的,无法用于铺纸机当中,进行二次铺纸。通过自动去纸机器人取下来的纸张会通过人工铺纸的方式进行二次利用,不完整的纸张可以在纸张的二次利用过程中,通过人工去除。
1.4 通讯原理
机器人与吸纸机构之间采用UDP通讯方式,相比TCP通讯,UDP通讯具备资源消耗小,处理速度快的优点。
2 控制系统
自动去纸机器人控制器采用西门子1200PLC,1200PLC具有模块化、结构紧凑、功能全面等特点,适用于多种应用,同时1200PLC具有可扩展的灵活设计,符合工业通讯最高标准的通讯接口,以及全面的集成工艺功能,传动控制采用西门子总线伺服PN V90,V90伺服器具备精度高,响应快,与1200PLC具备更好的兼容性的特点,保证了吸纸准确的同时减少现场接线,维护简单。
3 自动去纸机器人在玻璃深加工中的应用
由于工业机器人具有自由度高、运动控制精度高、运行速度高等特性,在玻璃深加工中能适应绝大多数工作要求,尤其适用于重复性工作,且由于其柔性好,当企业生产工艺发生改变时,可以通过及时切换程序使去纸机器人能够更快地投入到新工艺的生产中,同时还可以有效解决企业员工人员流动大、生产周期不易确定等管理难题。
在玻璃深加工中,一架玻璃(150片)人工去纸时间60 min,自动去纸机器人仅需要45 min,节约15 min,提高了效率,产品破损率降低30%以上,劳动成本节约70%以上。自动去纸机器人的投入使用可以替代传统工作模式,促进工作效率和工作质量的提升,同时人工劳动强度和风险也会降低。
4 结语
通过对自动去纸机器人上片机构的研发与使用,在生产过程中减少了该道工序的人员配置,提高了生产效率,且该设备具有相对结构简单、操作方便、控制稳定、安全可靠等优点,能够满足企业降本增效的需求。在行业内具有一定的推广意义。
