轮式搜救机器人地形自适应机构设计及越障性能分析
2023-11-10赵迪陈果陈小利王熊锦
赵迪, 陈果, 陈小利, 王熊锦
(湖北工业大学 机械工程学院, 湖北 武汉 430068)
搜救机器人作为具备越障能力的智能化移动设备,能够代替人力更高效地完成灾后搜救工作,具有广阔的应用前景[1]。在复杂地形环境下的搜救工作中,一款具备地形自适应能力的越障机构对提升搜救机器人的移动性能和搜救效率有十分重要的意义。
目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果。吉林大学的杨璐等[2-3]提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力。中国科学技术大学的陈世荣等[4]研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力。华中科技大学的尚建忠等[5]提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力。北京邮电大学的刘金生[6]对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7-8]进行了仿真分析,仿真结果验证了该机构在越障时的优越性。此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9]、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10]以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11]对移动设备主体的越障能力和地形自适应能力均有较大的提升。
现阶段,国内的一些高校、研究所和实验室[12-15]虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处。
为提高灾后搜救效率、降低搜救人员的工作强度以及减少不必要的人员伤亡和财产损失,针对灾后典型的瓦砾、残垣路面,设计了一款被动地形自适应机构,用于辅助轮式搜救机器人在复杂地形环境中更高效地执行搜救任务。通过对地形环境的分析和归纳,确定了轮式搜救机器人的主要越障目标为400 mm高的垂直台阶。首先,基于传统越障机构的特点,对地形自适应机构进行选型;同时,通过分析机构的攀爬、越障原理和几何特性,确定各杆件的几何约束条件,并采用遗传算法对机构进行优化设计。然后,对轮式搜救机器人的整个越障过程进行分析,构建其主要越障阶段的动力学模型并开展力学分析。最后,建立轮式搜救机器人的多刚体动力学模型,利用ADAMS软件对其越障性能进行仿真和验证。
1 轮式搜救机器人地形自适应机构设计
1.1 地形自适应机构选型
在面对各种复杂的地形环境时,搜救机器人不仅要具备良好的运动平顺性,还要拥有优异的地形自适应能力。基于前人的设计经验以及轮式搜救机器人对地形自适应的实际需求,设计了一款被动地形自适应机构,其主要由图1(a)所示的双摇杆四边形攀爬机构和图1(b)所示的双摇臂越障机构组成。

图1 被动地形自适应机构单元Fig.1 Units of passive terrain adaptive mechanism
1.2 地形自适应机构几何模型构建
1.2.1 攀爬机构几何模型
双摇杆四边形攀爬机构的几何结构如图2所示。由三心定理可知,在四边形连杆机构ABCD中,连杆AD和连杆BC的延长线的交点P0为摆杆CDE的速度瞬心;摆杆CDE的末端与机器人前轮的中心相连。当机器人前轮与障碍物接触时,摆杆CDE末端E点在水平方向上外力F的作用下带动摆杆CDE翻转,将机器人前轮绕速度瞬心P0向上抬升至E'点,从而实现攀爬机构的越障功能并达到辅助机器人完成后续越障过程的条件。

图2 攀爬机构几何结构Fig.2 Geometric structure of climbing mechanism
攀爬机构能够向上抬升的条件为:在四边形连杆机构ABCD通过变形将前轮中心E点向上抬升的过程中,E点的运动轨迹不能越过竖直切面,同时应保证摆杆CDE的速度瞬心P0始终位于前轮中心E点的下方[16]。综上所述,以连杆AB为基础、A点为原点建立直角坐标系(x轴与地面平行,下文同),构建如图3所示的攀爬机构几何模型。设AB=L1,BC=L2,CD=L3,AD=L4,DE=L5,BD=L11;∠BAD=α0,∠ABD=β0,∠CBD=φ0,∠CDB=δ0,∠BDA=ε0,AB与y轴的夹角为λ0,DA与x轴的夹角为θ0,BA与x轴的夹角为α,DE与x轴的夹角为ρ0;根据实际需求,机器人底盘距离地面的垂直高度H=420 mm。

图3 攀爬机构几何模型Fig.3 Geometric model of climbing mechanism
根据图3所示的攀爬机构几何模型,可得E点的横、纵坐标xE、yE的表达式:
设机器人前轮即将接触障碍物时,即攀爬机构即将受力变形时E点的初始纵坐标为yE0,则攀爬机构的抬升高度ΔH0为:
鉴于攀爬机构的抬升高度ΔH0与参数θ0、L2和L3有关,故选择这3个参数作为设计变量,其取值范围如表1所示。

表1 攀爬机构设计变量的取值范围Table 1 Range of design variables for climbing mechanism
结合实际布置需求,建立攀爬机构抬升高度的优化模型:
式中:f(X0)为优化目标函数,即攀爬机构抬升高度ΔH0的倒数;X0为攀爬机构的设计变量矩阵;x'E为xE的导函数。
1.2.2 越障机构几何模型
双摇臂越障机构的几何结构如图4所示。在越障过程中,越障机构因受到外力作用,其连杆位置发生改变,使得机器人中、后轮抬升,从而实现越障。连杆QG和连杆IS为连架杆,其延长线的交点为P1。由三心定理可知,交点P1为摆杆KGSU的速度瞬心。当机器人的中轮受力时,摆杆KGSU沿速度瞬心逆时针旋转,从而实现中轮的向上抬升。

图4 越障机构几何结构Fig.4 Geometric structure of obstacle-surmounting mechanism
通过分析可知,当摆杆KGSU中GS段与连杆SI处于同一直线时,越障机构的抬升高度达到极限。基于此,以越障机构处于极限位置时的抬升高度为优化目标,寻找最优解。
如图5所示,以机架QI为x轴、Q点为原点建立直角坐标系。根据越障机构的整体布局,令QI=L=750 mm,机器人中、后轮的轮距d=800 mm,机器人轮子半径R=150 mm。设越障机构位于极限位置时,∠GQI=α1,∠QGI=β1,∠QIG=θ1;连杆QG与连杆GK的夹角为φ1,∠KGS=∠GSU=γ;QG=L6,GK=L7,GS=L8,SI=L9,SU=L10。为保证受力均衡,梯形结构的腰长相等,即L6=L9,L7=L10。

图5 越障机构几何模型Fig.5 Geometric model of obstacle-surmounting mechanism
根据图5所示的越障机构几何模型,可得U点的横、纵坐标xU、yU的表达式:
设机器人中轮即将接触障碍物时,即越障机构受力变形时U点的初始纵坐标为yU0,则越障机构的抬升高度ΔH1为:
越障机构的抬升高度ΔH1与参数θ1、L6和L7有关,故选择这3个参数作为设计变量,其取值范围如表2所示。
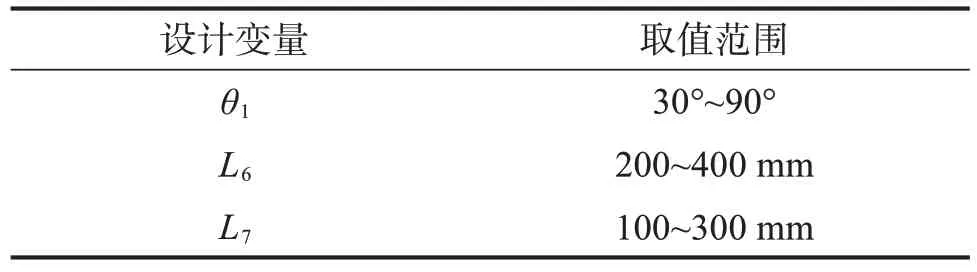
表2 越障机构设计变量的取值范围Table 2 Range of design variables for obstacle-surmounting mechanism
结合实际布置需求,得到越障机构抬升高度的优化模型:
式中:f(X1)为优化目标函数,即越障机构抬升高度ΔH1的倒数;X1为越障机构的设计变量矩阵;x'U为xU的导函数。
1.3 地形自适应机构优化
基于上文构建的优化模型,采用遗传算法[17-20]对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解。遗传算法的求解流程如图6所示。

图6 遗传算法求解流程Fig.6 Genetic algorithm solving process
在遗传算法随机生成的种群中,各设计变量作为种群内遗传的基因,会在各自设定的范围内随机取值,进而得到攀爬机构或越障机构中各杆件的不同尺寸方案。不同的杆件尺寸方案随机组合构成不同的基因型,但一部分基因型可能不满足优化模型中的几何约束条件。为减少无效解的产生,在生成个体及交叉、变异后均须对个体的基因型进行判断,以去除不满足几何约束条件的基因型。为提高求解效率,采用十进制编码,在选择子代时采用精英策略,选取父代中表现型相对较好的前50%基因型编入子代;采用个体生成函数随机生成符合几何约束条件的新个体作为子代中的变异个体,最终得到新的子代。为确保遗传算法能够以最快速度实现收敛,设置变异概率随迭代次数的增加而减小。通过求解、迭代和优化,最终得到符合几何约束条件的被动地形自适应机构的最优尺寸参数。攀爬机构和越障机构的优化求解过程分别如图7和图8所示。

图7 攀爬机构的优化求解过程Fig.7 Optimization solving process for climbing mechanism

图8 越障机构的优化求解过程Fig.8 Optimization solving process for obstacle-surmounting mechanism
由图7可知,经过约50次的迭代后,攀爬机构的优化求解过程逐渐收敛,出现最优解X0=[110° 277 mm 158 mm]T,对应的最优解minf(X0)=2.976×10-3mm-1,此时攀爬机构的抬升高度达到336 mm。如图8所示,经过约80次的迭代后,越障机构的优化求解过程逐渐收敛,出现最优解X1=[61° 224 mm 150 mm]T,对应的最优解minf(X1)= 3.058×10-3mm-1,此时越障机构的抬升高度达到327 mm。
已知轮式搜救机器人的轮子半径为150 mm,当障碍物高度为400 mm时,机器人需要翻越的实际高度为250 mm,则被动地形自适应机构的抬升高度大于250 mm即可实现越障。由此可知,攀爬机构和越障机构均满足设计要求。
1.4 地形自适应机构的尺寸参数与布局
通过优化和计算,最终得到轮式搜救机器人被动地形自适应机构的结构尺寸及初始姿态参数,如表3所示。
搭建轮式搜救机器人的被动地形自适应机构,其整体布局如图9所示。基于机器人处于水平状态时越障机构的布置情况,计算得到攀爬机构下安装点至越障机构前安装点的距离D0=375 mm。

图9 轮式搜救机器人被动地形自适应机构的整体布局Fig.9 Overall layout of passive terrain adaptive mechanism of wheeled search and rescue robot
2 轮式搜救机器人越障过程分析
在被动地形自适应机构的辅助下,轮式搜救机器人应具备越过400 mm高垂直台阶的能力。因此,本节将针对轮式搜救机器人爬越400 mm高垂直台阶的过程进行详细分析。如图10所示,轮式搜救机器人的越障过程主要包括前轮越障、中轮越障、后轮越障三个阶段。

图10 轮式搜救机器人的越障过程Fig.10 Obstacle-surmounting process of wheeled search and rescue robot
1)前轮越障。如图10(a)所示,当机器人前轮接触到垂直台阶时,其开始进入越障阶段。前轮因受到垂直台阶阻力的作用,对攀爬机构中的摆杆施加沿逆时针方向的扭矩。在阻力的作用下,攀爬机构中各连杆的位置发生变化,带动前轮向上抬升,如图10(b)所示;直到前轮达到可越过垂直台阶的高度时,前轮完成越障,如图10(c)所示。
2)中轮越障。当前轮完成越障后,机器人以图10(c)所示的姿态继续向前行驶,一段时间后中轮开始与垂直台阶接触,如图10(d)所示。在垂直台阶的作用下,越障机构中的摆杆受到沿逆时针方向的扭矩的作用,使得越障机构中各连杆的位置发生变化,从而带动中轮向上抬升,如图10(e)所示。随后,机器人继续向前行驶,直到中轮越过垂直台阶,如图10(f)所示。
3)后轮越障。当中轮完成越障后,机器人以图10(f)所示的姿态继续向前行驶,一段时间后后轮与垂直台阶接触,如图10(g)所示,后轮因受到垂直台阶的阻力,使得越障机构中各连杆的位置发生变化并带动后轮向上抬升,如图10(h)所示,直到后轮越过垂直台阶,从而完成整个越障过程,如图10(i)所示。
3 轮式搜救机器人越障过程动力学建模与分析
由上文分析可知,在轮式搜救机器人的整个越障过程中,图10(b)、图10(e)、图10(h)所示的状态为越障过程中的关键状态。因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析。目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21-24]。基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析。
3.1 前轮越障受力分析
如图11所示,以攀爬机构下安装点A为原点建立直角坐标系,基于达朗贝尔原理建立前轮越障时轮式搜救机器人本体的力平衡模型。其中,点O为机器人的质心;m为机器人质量,m1为前轮质量;M1为前轮转矩,M2为中轮转矩,M3为后轮转矩;FNx1为垂直台阶对前轮在水平方向上的阻力,FNy1为前轮在竖直方向上的附着力,Fx1为机器人摆杆对前轮的作用力,Fy1为前轮在竖直方向上的阻力,F2为地面对中轮的支持力,μF2为中轮的附着力,F3为地面对后轮的支持力,μF3为后轮的附着力。

图11 轮式搜救机器人前轮越障受力分析Fig.11 Force analysis of front wheel obstacle-surmounting of wheeled search and rescue robot
在前轮越障过程中,设整个机器人的质心沿水平方向的位移为x1,沿竖直方向的位移为y1。令机器人质心的俯仰角为ϕ0,转动惯量为J0,由此建立前轮越障过程中整个机器人的动力学模型:
根据图11(b),对前轮在越障过程中的受力情况进行分析。通过分析可知,前轮的加速度a1和角加速度ω1分别满足式(8)和式(9):
由此建立前轮越障时的动力学模型:
式中:J1为前轮的转动惯量。
3.2 中轮越障受力分析
同理,如图12所示,以越障机构前安装点I为原点建立直角坐标系,并基于达朗贝尔原理建立中轮越障时轮式搜救机器人本体的力平衡方程。图中:m2为中轮质量;F1为地面对前轮的支持力,μF1为前轮的附着力,FNx2为垂直台阶对中轮在水平方向上的阻力,FNy2为中轮在竖直方向上的附着力,Fx2为机器人摆杆对中轮的作用力,Fy2为中轮在竖直方向上的阻力;其余变量与图11同。

图12 轮式搜救机器人中轮越障受力分析Fig.12 Force analysis of middle wheel obstacle-surmounting of wheeled search and rescue robot
如图12(a)所示,θ1在机器人越障过程中由65°逐渐减小至极限位置时的30°。设QS=L12,连杆GS与x轴的夹角为φ2,SU与x轴的夹角φ3。已知θ1,可计算得到越障过程中L12的值,从而推导出任意时刻φ2、φ3的值,即:
设在中轮越障过程中,整个机器人在水平方向上的位移为x2,在竖直方向上的位移为y2;越障机构后安装点Q到机器人质心的距离为L0,由此可建立中轮越障过程中整个机器人的动力学模型:
根据图12(b),对中轮在越障过程中的受力情况进行分析。通过分析可知,中轮的加速度a2和角加速度ω2分别满足式(16)和式(17):
由此建立中轮越障时的动力学模型:
式中:J2为中轮的转动惯量。
3.3 后轮越障受力分析
同理,如图13所示,以越障机构后安装点Q为原点建立直角坐标系,基于达朗贝尔原理建立后轮越障时轮式搜救机器人本体的力平衡方程。图中:m3为后轮质量;FNx3为垂直台阶对后轮在水平方向上的阻力,FNy3为后轮在竖直方向上的附着力,Fx3为机器人摆杆对后轮的作用力,Fy3为后轮在竖直方向上的阻力;其余变量与图11和图12同。

图13 轮式搜救机器人后轮越障受力分析Fig.13 Force analysis of rear wheel obstacle-surmounting of wheeled search and rescue robot
后轮越障时对机器人整体姿态的几何分析、设计和计算与中轮越障时同理。设在后轮越障过程中,机器人在水平方向上的位移为x3,在竖直方向上的位移为y3,由此建立后轮越障过程中整个机器人的动力学模型:
如图13(b)所示,对后轮在越障过程中的受力情况进行分析。通过分析可知,后轮的加速度a3和角加速度ω3分别满足式(20)和式(21):
由此建立后轮越障时的动力学模型:
式中:J3为后轮的转动惯量。
基于上述动力学模型计算可得:在前轮越障过程中,轮式搜救机器人的质心高度上升108 mm,质心俯仰角的变化范围为[-1°, 5°];在中轮越障过程中,机器人的质心高度上升91 mm,质心俯仰角的变化范围为[-3°, 7.5°];在后轮越障过程中,机器人的质心高度上升206 mm,质心俯仰角的变化范围为[-1°, 2.4°]。
4 轮式搜救机器人越障性能仿真
4.1 多刚体动力学模型的建立
通过建立多刚体动力学模型来对装配被动地形自适应机构的轮式搜救机器人的越障性能进行仿真和分析,以验证在400 mm的障碍高度下机器人完成越障任务的可行性。同时,通过监测机器人在翻越障碍物过程中的空间姿态来考察其稳定性和地形自适应能力。
建立轮式搜救机器人的多刚体动力学模型,如图14所示。在建模时作如下假设:

图14 轮式搜救机器人多刚体动力学模型Fig.14 Multi-rigid-body dynamics model of wheeled search and rescue robot
1)忽略车身、车架等部件的具体结构和外形属性,使用质量相等的长方体替代;
2)攀爬机构及越障机构的杆件按照连接需要保留位置信息,简化成连杆;
3)除了阻尼和弹性元件外,其余零件均视作刚体,在仿真过程中不考虑变形;
4)各运动副内的摩擦力忽略不计。
4.2 动力学仿真分析
将建立的轮式搜救机器人多刚体动力学模型和400 mm高的台阶障碍地形导入ADAMS软件,以开展机器人的越障仿真分析,其越障过程如图15所示。

图15 轮式搜救机器人越障过程仿真结果Fig.15 Obstacle-surmounting process simulation results of wheeled search and rescue robot
由图15可知,轮式搜救机器人在被动地形自适应机构的辅助下能够顺利通过400 mm高的垂直台阶,且行驶过程平稳。
轮式搜救机器人的越障稳定性评价主要参考其质心在竖直方向上的状态参数的变化情况,包括质心在竖直方向上的位移、速度、加速度以及质心俯仰角。通过ADAMS仿真得到轮式搜救机器人质心在越障过程中的位移、速度和加速度曲线,如图16所示。

图16 轮式搜救机器人越障性能仿真结果Fig.16 Obstacle-surmounting performance simulation results of wheeled search and rescue robot
由图16可知,在越障过程中,轮式搜救机器人质心在竖直方向上的加速度在0.8—1.2 s(前轮越障)、1.2—1.7 s(中轮越障)以及2.5—3.0 s(后轮越障)阶段共出现了3次波动,其中前轮和中轮在越障时受到的冲击稍大。当前轮、中轮、后轮依次完成越障后,机器人的质心高度由最初的420 mm提升到最终的820 mm。
基于由ADAMS仿真得到的轮式搜救机器人质心在越障过程中的位移数据,计算得到质心俯仰角的变化曲线,如图17所示。由图可知,在越障过程中,机器人质心俯仰角的变化范围为[- 4°, 8°]。

图17 轮式搜救机器人质心俯仰角变化曲线Fig.17 Variation curve of centroid pitch angle of wheeled search and rescue robot
基于理论计算可知:在越障过程中,轮式搜救机器人质心高度上升了405 mm,质心俯仰角的变化范围为[-3°, 7.5°],与动力学仿真结果基本一致。综上所述,在被动地形自适应机构的辅助下,轮式搜救机器人具备所需的越障能力,且在越障过程中质心俯仰角的变化远小于失稳角(74°),说明其越障稳定性良好。
5 结 论
1)基于对传统越障机构的分析,完成了地形自适应机构的选型,并结合遗传算法对其进行了优化,实现了对轮式搜救机器人被动地形自适应机构的设计。
2)对轮式搜救机器人的越障过程进行了分析,基于达朗贝尔原理建立了其动力学模型,并对其越障性能进行了分析和计算。
3)基于轮式搜救机器人的结构特点,建立了其多刚体动力学模型;利用ADAMS软件对机器人的越障性能进行了仿真,并与理论计算结果进行了对比。对比结果验证了轮式搜救机器人的越障及地形自适应能力,这可为轮式搜救机器人样机的搭建及后续研究的开展提供理论依据。