大孔径全可动射电望远镜换馈系统设计
2023-11-10杨凤辉汪敏董亮施硕彪
杨凤辉, 汪敏, 董亮, 施硕彪
(中国科学院 云南天文台, 云南 昆明 650216)
我国最南边的40 m孔径全可动射电望远镜位于云南省昆明市,其在可观测天区和射电天文观测方面具有独特优势。昆明40 m孔径全可动射电望远镜(以下简称射电望远镜)的主要任务是接收月球探测卫星和火星探测卫星下行的科学数据,并对探测卫星进行精密测轨。从2007年至今,射电望远镜圆满完成了“嫦娥一号”卫星、“嫦娥二号”卫星、“嫦娥三号”卫星、“嫦娥四号”中继星、“嫦娥四号”卫星、“嫦娥五号”卫星探测数据的传输、精密测轨及其他深空探测任务。目前,研究人员还利用射电望远镜开展了脉冲星、分子谱线的观测及甚长基线干涉测量等射电天文研究工作。
射电望远镜设计之初只有一个S/X双频馈源,观测频率为S频段的2~4 GHz、X频段的 8~12 GHz。为了进一步满足探月工程、深空探测及其他天文观测任务的需求,作者对S/X双频馈源进行多馈源改造,并开发了换馈系统。在不改变现有天线结构(包括主副反射面、天线背架支撑等)的基础上,拆除原S/X双频馈源,安装新的S/X双频馈源。新的S/X双频馈源在结构尺寸上有所变化,但其性能并未降低。原来的馈源支套上只有1个S/X馈源喇叭,现增加了C频段、Ku频段馈源,故改造之后馈源支套上有3个馈源喇叭,实现3个馈源4个频段之间电动快速切换,使天线具有多频段接收能力。本文给出了馈源及换馈系统的设计方案和实施方案,并在系统改造完成后对换馈系统的主要指标和天线的主要技术性能进行了测试。
1 换馈系统的组成及工作原理
射电望远镜如图1所示。馈源位于抛物面天线的卡塞格伦焦点上,馈源舱内有接收机、变频单元等设备,整个馈源舱重达4 t。馈源位置的准确性直接关系着天线的增益。为了保证馈源改造升级之后原有天线的性能不受影响,甚至有所提高,对换馈系统的设计和安装调试提出了较高要求。

图1 射电望远镜Fig.1 Radio telescope
1.1 换馈系统的组成
换馈系统的组成如图2所示[1],其主要包括馈源单元、结构单元和控制单元。其中:馈源单元由S/X双频馈源、C频段馈源和Ku频段馈源组成;结构单元主要由支撑筒、俯仰筒和密封套等组成;控制单元主要由驱动控制单元、位置显示单元和控制与保护逻辑测量单元等组成。

图2 换馈系统组成Fig.2 Composition of feed switching system
1.2 换馈系统工作原理
在垂直于主反射面轴线的平面内,将3个馈源排布于馈源支套内,3个馈源的相心处在同一圆弧面上,此圆弧面过天线焦点且垂直于主反射面轴线。工作时,摆动所需频段的馈源至弧面中心,对准副反射面,馈源之间的夹角和间隔在照射角范围内互不遮挡,并且尽量减少3个馈源支套对天线主反射面的遮挡。频段切换时,通过高精度电动推杆将工作馈源置于天线轴线相心处,将须工作的馈源移至弧面中心,并被可靠地锁定,同时将位置信号传递至控制系统[2-3]。
馈源单元中,S/X双频馈源的体积和质量最大,因此馈源系统设计的关键是S/X双频馈源的位置。从受力平衡和减小遮挡的角度出发,将3个馈源排列在一个水平面内,S/X双频馈源在中间,C频段、Ku频段馈源的体量较小,排在S/X双频馈源的两边。
馈源切换方式采取一维钟摆式,即通过驱动装置驱动位于同一平面的3个馈源的俯仰筒,使需工作的馈源摆动至中心轴线并对准副反射面。一维钟摆式馈源排布如图3所示。

图3 一维钟摆式馈源排布示意Fig.3 Schematic of feed source layout with one dimensional clock pendulum
采取丝杠推拉的方式实现馈源系统的整体运动。为了保证每次摆动后所使用馈源的轴线能够与天线的轴线重合,馈源的摆动中心应位于天线的轴线上。转动中心的选取涉及力平衡、空间利用等诸多因素[4-5]。
3个馈源的偏开角度为15°。从C频段、Ku频段馈源的喇叭相心到S/X双频馈源喇叭边缘的角度均为15°,而C频段、Ku频段馈源喇叭对副反射面的照射角为11.8°,可以确保喇叭间不会相互遮挡。
2 馈源设计
2.1 原天线参数
射电望远镜的天线为焦径比为0.33的卡塞格伦双反射面天线。其中:主反射面直径在26 m以内的为实体面板;直径为26~40 m的为网面,网孔尺寸为4 mm×4 mm。卡塞格伦双反射面天线的几何参数如图4所示,其具体数值如表1所示。S频段和C频段工作在40 m孔径的实网全面板,由于网孔尺寸超过了X、Ku频段的波长,X、Ku频段工作在26 m孔径的内圈实面板,此时40 m孔径天线的有效孔径只相当于26 m孔径的天线。
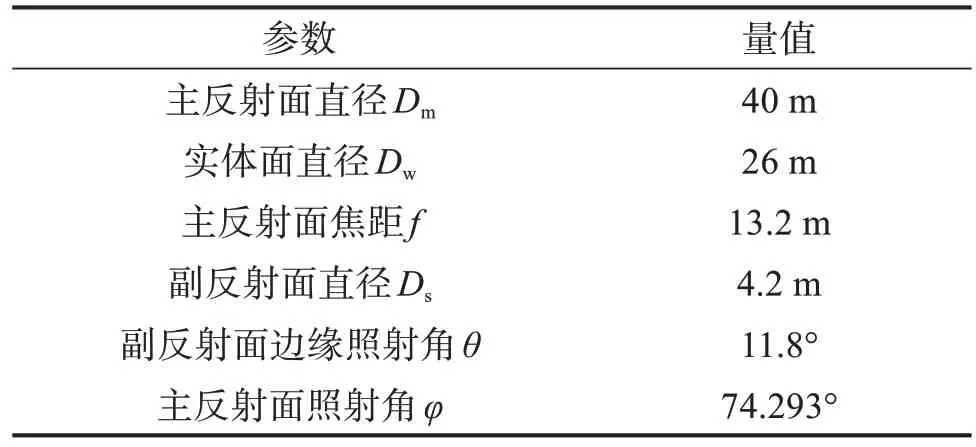
表1 卡塞格伦双反射面天线几何参数值Table 1 Geometric parameter values of Cassegrain antenna with dual reflectors

图4 卡塞格伦双反射面天线几何参数示意Fig.4 Schematic of geometrical parameters of Cassegrain antenna with dual reflectors
望远镜主抛物面方程为:z=x2/4f。面型精度的均方根值δRMS:当主反射面直径在26 m内时,δRMS≤0.8 mm;当主反射面直径为26~40 m时,δRMS≤2.4 mm。
利用天线现有的几何参数,可以设计不同频段高效率照射的馈源喇叭。
2.2 馈源结构及仿真
2.2.1 S/X双频馈源结构
S/X双频馈源主要由S/X双频段波纹喇叭、S/X频段耦合器、S频段极化器和X频段极化器等组成。S/X双频馈源结构如图5所示,其中,S、X频段共用一个辐射喇叭,通过S/X分波器将S、X频段的信号分离,并利用组合网络将耦合出的S频段信号分成左、右旋圆极化,而X频段的信号继续向后传输给制冷接收机[6]。
S/X双频馈源输出接口如图6所示。其中S频段接口采用标准FDP22(BJ22)法兰,X频段接口采用标准FBP84(BJ84)法兰。

图6 S/X双频馈源输出接口Fig.6 Output interface of S/X dual-frequency feed source
2.2.2 C频段馈源结构
C频段馈源主要由波纹喇叭、圆极化器和正交器等组成。C频段馈源的带宽最宽,为4~8 GHz。其波纹喇叭采用直线张角喇叭,如图7所示[7]。其输出段呈直线。
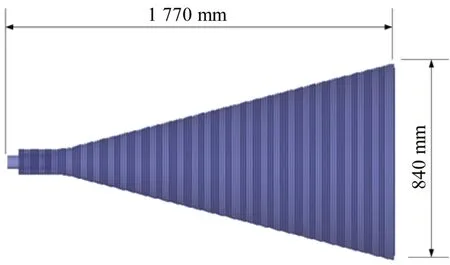
图7 C频段馈源波纹喇叭示意Fig.7 Schematic of corrugated horn of C frequency feed source
2.2.3 Ku频段馈源结构
Ku频段馈源主要由波纹喇叭、圆极化器和正交器等组成。波纹喇叭采用直线张角喇叭,如图8所示;圆极化器采用圆波导介质片移相形式;正交器选用圆波导形式。其极化方式为左右旋圆极化,接口为标准BJ140方形法兰。
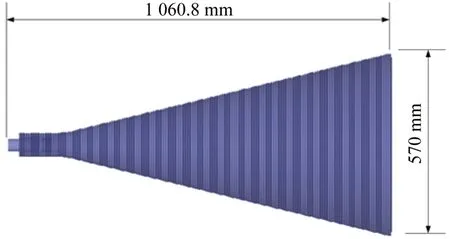
图8 Ku频段馈源波纹喇叭示意Fig.8 Schematic of corrugated horn of Ku frequency feed source
2.2.4 馈源仿真
依据上述设计的各个馈源喇叭,采用电磁仿真软件对天线辐射特性进行仿真分析。S频段、C频段馈源进行实网组合40 m孔径仿真,X频段、Ku频段馈源进行26 m孔径实体面板仿真。天线辐射特性仿真模型如图9所示,仿真结果如表2所示。

表2 天线辐射特性仿真结果Table 2 Simulation results of antenna radiation characteristics

图9 天线辐射特性仿真模型Fig.9 Simulation model of antenna radiation characteristics
3 换馈系统设计
3.1 换馈系统结构
根据换馈方案和工程难点,设计了换馈系统并进行了安装调试。换馈系统结构如图10所示,其主要由与中心体连接的支撑筒、与多频馈源支套连接的俯仰筒、连接支撑筒和俯仰筒的电动推杆、俯仰筒和支撑筒之间的旋转轴以及与旋转轴一端连接的旋变组合等零部件组成。
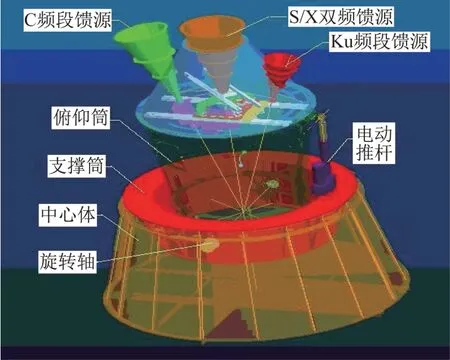
图10 换馈系统结构Fig.10 Structure of feed switching system
电动推杆一端铰接在支撑筒上,另一端铰接在俯仰筒上,在电机的驱动下,推杆伸长或收缩,带动俯仰筒绕换馈摆动中心旋转。通过旋转变压器确定俯仰筒的旋转角度并反馈给控制系统,实现位置闭环控制,保证馈源换馈到位时的位置精度。电动推杆由T形丝杠、电机、减速机、换向器、传动轴、联轴器、制动器和离合器等部件构成,具有换馈到位时自锁稳定、运行过程平稳、使用寿命长等优点。
各频段馈源工作时的馈源位置如图11所示[8-10]。

图11 各频段馈源工作时的馈源位置Fig.11 Feed source position during each frequency feed source working
3.2 换馈系统受力分析
原馈源系统总重量约为4.15 t,重心距中心体上端法兰面1 260 mm;换馈改造后旋转部分的重量为3.98 t,重心距中心体上端法兰面1 766 mm,驱动装置需提供5.8~9.1 t的力,同时换馈系统总重量的变化对天线配重的影响也需考虑。
建立换馈系统有限元模型。选取Shell63单元模拟中心体、支撑筒和俯仰筒,Link8单元模拟电动推杆,质量单元Mass21模拟馈源质心。仿真中只考虑结构重力载荷,约束中心体底面法兰。中心体、支撑筒和俯仰筒均采用Q235钢材[11-12]。相对于支撑筒和俯仰筒,3个馈源喇叭的质量很小,在建立换馈系统有限元模型时可以忽略。所建立的换馈系统有限元模型如图12所示。

图12 换馈系统有限元模型Fig.12 Finite element model of feed switching system
换馈机构的旋转范围为-15°~15°,对应着3种馈源的工作状态。每种馈源工作时,又分别对应天线从朝天到指平的不同姿态。校核整个换馈系统的结构强度和刚度。天线处于朝天姿态时馈源的受力分析结果如图13所示[13-14]。天线处于朝天和指平不同姿态时换馈系统的受力分析结果如表3所示。
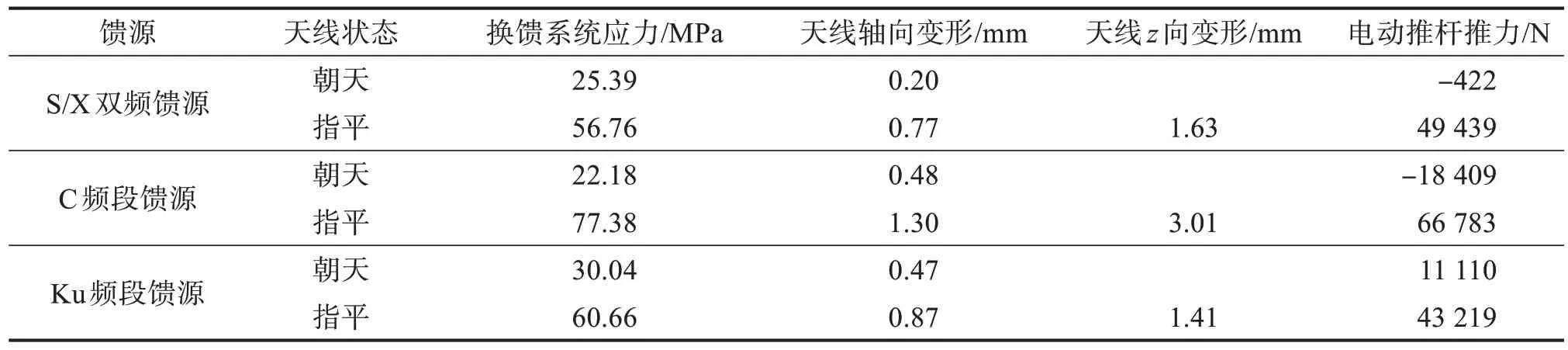
表3 天线处于处不同姿态时换馈系统的受力分析结果Table 3 Force analysis results of feed switching system with antenna at different attitudes
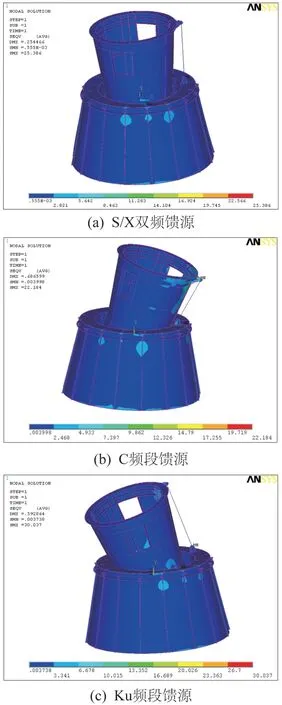
图13 天线处于朝天姿态时馈源的受力分析结果Fig.13 Force analysis results of feed source with antenna at upturn position
天线处于朝天姿态时,换馈机构的应力最大值为30.04 MPa,出现在中心体上法兰板与筋板连接处。同时,天线轴向变形最大值为0.48 mm,为天线朝天时C频段馈源换馈到位时的变形。
天线处于指平姿态时,须考虑其在换馈平面内垂直于轴线方向的重力变形,即考虑系统工作时天线z向的变形。此时换馈机构的应力最大值为77.38 MPa,出现在C频段馈源工作时推杆尾座连接处。同时,天线轴向变形最大值为1.30 mm,z向变形最大值为3.01 mm,均为C频段馈源工作时天线指平时的变形值。
进行换馈机构屈曲稳定性分析时须约束中心体底面法兰,对俯仰筒上端法兰加载2 000 kg的载荷,得到换馈机构在该种载荷工况下换馈机构的一阶屈曲稳定性安全系数为11.868。
综上可知,在换馈过程中,换馈机构的最大应力(77.38 MPa)小于Q235钢材的容许应力(157 MPa),天线轴向变形最大值(1.30 mm)小于5 mm,在加载2 000 kg的工况下换馈机构的一阶屈曲稳定性系数为11.868,满足了结构强度、刚度和稳定性要求。
3.3 控制系统设计
3.3.1 控制单元工作原理
控制系统的主要任务是准确、稳定、可靠地控制多频馈源的位置,使工作频段的馈源能够准确地与天线保持同轴,不发生漂移。
控制单元采用典型的三环控制系统,其输入是给定的位置控制命令。实际的控制信号是由给定的位置命令与馈源实际位置之间的角度误差的大小和极性决定的。控制信号控制电机,使换馈机构向误差减小的方向转动,从而实现各频段馈源精确定位在目标位置。控制单元中,电流环和速度环控制在中央控制器中实现,位置环控制在控制软件中实现。换馈单元的工作原理如图14所示[15-17]。

图14 换馈单元工作原理示意Fig.14 Schematic of working principle of feed switching unit
3.3.2 控制单元主要部件
控制单元主要由中央控制器、远程控制计算机及控制软件、直流伺服电机(含测速机和制动器机组)、电机驱动控制器、可编程逻辑控制器、编码模块、模拟量采集模块、位置传感器和安全保护器件等组成[18]。
中央控制器是实施馈源轴运动位置的闭环控制及接口数据通信的核心部件。采用基于中央控制器工业总线的嵌入式计算机系统,并搭配各种扩展模块,来保证控制系统的高精度及高可靠性控制,并使得系统易开发及易维护。
直流伺服电机选用稀土永磁宽调速直流伺服电机测速机组,它具有效率高、体积小、质量小、噪声小及调速范围大等优点。
电机驱动控制器是驱动天线的功率放大器。选用英国Park公司生产的590+直流马达控制器,它具有功率放大倍数高、动态响应好、效率高、体积小、质量小、噪声小及调速范围大等优点。
控制与保护逻辑电路包括安全保护逻辑以及控制电路,其功能主要是馈源旋转方向的限位保护、系统启动与停机控制等。
3.3.3 远程控制上位机
远程控制上位机与控制单元的中央控制器通过网络进行通信。控制单元可以实现换馈链路的数字位置闭环控制、数字角度编码、控制参数的设置和保存、与外界监控机的双向数据通信。上位机远程控制界面如图15所示,其具有待机、手动控制和位置闭环控制等3种控制方式。

图15 上位机远程控制界面Fig.15 Remote control interface of upper computer
待机:在该方式下,制动器抱闸,驱动单元处于禁用状态;手动控制:在该方式下,用户可以通过手动方式转动馈源,改变换馈速度;位置闭环控制:在该方式下,位置指令通过远程控制上位机的控制软件直接输入,执行后使馈源精确摆向指定的工作位置,到达指定位置后自动停止并锁定。
4 换馈系统的安装及调试
4.1 换馈时间
在换馈过程中,电动推杆的最大行程为760 mm,运行速度为2.5 mm/s,因此换馈时间t=760/2.5=5.067 min <10 min,可见能较为快速地进行换馈操作。
4.2 安装精度
虽然换馈机构的结构强度和刚度满足了要求,但在现场安装中必然存在安装误差,因此在换馈机构设计中须采取以下2个措施来保证安装精度[19],以进一步优化结构方案,减小变形。
1)馈源支套与俯仰筒的安装定位如图16所示。采取圆止口定位模式,由4个定位销确保源支套与俯仰筒的正交性,以保证到位及复装的精度。安装止口的最大间隙为0.15 mm,定位销的装配间隙为0.06 mm,则折算至天线相心处的最大安装误差为0.21 mm。

图16 馈源支套与俯仰筒的安装定位Fig.16 Installation and positioning of feed sleeve and pitching cylinder
2)将换馈机构的旋转轴支座与俯仰筒和电动推杆进行一体化设计,支撑筒与中心体间同样采取圆止口与上法兰面相配的结构,避免现场安装时找正和调整,保证了安装基准的一致性、安装的便利性及定位的准确性。
4.3 换馈精度
换馈系统的换馈精度由馈源支套尺寸精度、换馈机构装配精度、电动推杆运动精度及铰接精度、伺服控制精度及结构变形量等决定。
根据机械加工的精度等级,馈源支套尺寸精度可以达到0.5 mm;换馈机构装配精度可达0.2 mm。
当电机转动时电动推杆作伸缩直线运动,推杆前端与俯仰筒铰接。推杆的运动精度即推杆每次能伸缩的最小距离,选用运动精度为0.1 mm的推杆。推杆铰接精度由其制造精度和安装工艺决定,推杆前端与俯仰筒的铰接非常牢固,安装工艺保证了没有发生偏移的可能,而且根据受力分析可知,在最大受力状态下铰接应力小于其屈服极限,铰接不会发生破坏。推杆两端铰接精度为0.04 mm,则推杆运动及铰接总精度为0.14 mm。
电机采用调速范围宽、线性度好的直流电动机,其转速完全由换馈控制系统输出的控制电压控制,不需要齿轮减速机。伺服控制精度由编码误差、伺服驱动误差和伺服控制误差组成,伺服控制精度可达0.5 mm。
综合多种因素可得换馈系统引起的不同频段下的天线指向精度,如表4所示。

表4 换馈系统引起的不同频段下的天线指向精度Table 4 Antenna pointing accuracy in different frequency bands caused by feed switching system
4.4 柔性防雨罩的设计
馈源整体摆动时,馈源支套与中心体之间要密封,且需防雨、防尘,因此设计了具有足够硬度和适当延展性的柔性防雨罩。防雨罩材料为全涤纶,其两面涂有聚氯乙烯防雨涂层,在-40~60 ℃的气温下有3 a以上的使用寿命,在昆明地区有5 a以上的寿命,且后续更换简便,成本低廉。防雨罩上端与俯仰筒连接,下端与支撑筒固定,随着换馈时馈源的摆动一侧被柔性拉伸,另一侧则发生折叠,从而保证了整个系统的密封防雨。馈源柔性防雨罩实物如图17所示。

图17 馈源柔性防雨罩实物Fig.17 Object of flexible rain cover for feed source
5 天线性能测试
利用所设计的换馈系统对馈源进行改造。馈源改造后,根据天线性能测试标准对天线的主要性能指标进行测试[20-21],结果如表5所示。由表可知,天线的主要性能指标均满足了要求。

表5 馈源改造后天线的主要性能指标值Table 5 Main performance index values of antenna after feed modification
6 结 论
馈源和换馈系统改造之后,射电望远镜配置有S频段(2~4 GHz)、C频段(4~8 GHz)、X频段(8~12 GHz)和Ku频段(12~18 GHz),馈源通过换馈系统进行精准切换。改造后天线的工作频率得到扩展,可以满足更多的观测需求,提高了望远镜的观测效率和科研产出。
目前,换馈系统尚存在以下2点不足:一是换馈系统质量大,如果系统发生故障而需手动切换馈源时操作难度较大;二是不能随着天线俯仰角的变化实时调节馈源位置,天线俯仰的范围为5°~90°,由于天线自重变形,馈源对应的位置也须实时修正。下一步将针对以上不足进行改进,完善系统。主要的改进措施是,统计在使用过程中3个频段馈源的位置与天线俯仰角的关系,得出修正系数,以在换馈系统控制单元中实时修正馈源位置命令。