高速磁浮与高速轮轨系统主要技术参数对比分析
2023-11-10伍卫凡
伍卫凡
(中国铁路设计集团有限公司,天津 300308)
引言
高速铁路是铁路现代化的重要标志,是集多种高新技术于一体的复杂巨系统,已在世界各国得到广泛重视[1],打造更加安全可靠、经济高效、温馨舒适、方便快捷、节能环保的智慧高铁系统将成为中国高铁乃至世界高铁发展的趋势[2]。2021年2月24日,中共中央、国务院最新印发的《国家综合立体交通网规划纲要》中提出:研究推进超大城市间高速磁悬浮通道布局和试验线路建设快捷、绿色、节能的高速磁悬浮铁路将成为中国乃至世界后高铁时代的发展趋势,在400~600 km/h速度级范围内可以为人们提供更优质便捷的出行选择,是现有高速和城市铁路路网系统的有益补充,未来极具竞争力[3-5]。
目前,高速磁浮制式主要有常导电磁悬浮系统、低温超导电动悬浮系统以及高温超导钉扎悬浮系统。其中,常导高速磁浮利用电磁吸引原理实现列车悬浮,我国于2002年引进德国技术建成了世界上第一条高速磁浮商业运营线—上海磁浮示范运营线,最高运营速度和试验速度分别为430 km/h和501 km/h,至今已安全运营近二十年。其次,以上海高速磁浮示范运营线为契机,利用四个五年计划,我国在常导高速磁浮交通系统原型样机研发、工程化产品制造、国产化装备研制、工程项目规划建设等方面开展了大量的研究工作。2019年5月青岛四方车辆厂研制的时速600 km高速磁浮试验样车下线,标志着我国在高速磁浮车辆、牵引、运控通信等核心技术研发方面取得了重要阶段性成果。此外,招阳等[6]对不同速度的平、竖曲线半径范围进行了研究;谢毅等[7]针对时速600 km以上磁浮线路的最小曲线半径和缓和曲线长度进行初步研究;刘堂红等[8]对列车交会瞬态压力冲击作用下的高速磁浮列车横向振动进行了分析;翟婉明等[9]对不同行车速度和不同桥跨情形下高速列车与桥梁结构的动力响应进行了对比分析;梅元贵等[10]对距隧道进口端内不同距离横截面上不同测点的压力及压力变化率进行了研究;沈志云[11]就高速磁浮列车对轨道的动力作用及其与轮轨高速铁路的比较开展了研究;任愈等[12-14]对基于感应回线的磁浮车辆连续测速定位方法开展了研究;李开成等[15]对高速磁浮车载运行控制系统进行了研究;邓亚士等[16]对高速磁浮线路设计参数进行了研究;王梓丞等[17]对高速磁浮运行控制系统关键技术进行了研究;杨光等[18]对高速磁浮列车运行控制系统体系结构进行了研究;范钦海[19]对高速磁浮车辆对轨道平顺性要求进行了论述。
基于目前应用较成熟的常导电磁悬浮,结合高速磁浮技术标准研究成果,分别从线路、轨道、桥梁、隧道及牵引运控、无线通信等方面系统对比了时速600 km常导高速磁浮与时速350 km高速轮轨的主要技术参数,总结了常导高速磁浮与高速轮轨铁路工程的主要区别,为以后的高速磁浮总体设计与仿真验证提供参考。
1 常导高速磁浮技术原理
常导高速磁浮列车利用悬浮架两侧的可控直流电磁铁与定子铁芯间的吸力来支撑车体悬浮,其悬浮原理如图1所示。在悬浮电磁铁中通入直流电流,悬浮电磁铁与轨道上的定子铁芯之间产生电磁吸引力将车体浮起。在悬浮电磁铁模块上设置间隙传感器,测量悬浮电磁铁与定子铁芯之间的距离,根据间隙传感器的反馈主动控制系统不断实时闭环调整悬浮电磁铁线圈的电流,使悬浮间隙保持在10 mm左右。车载导向电磁铁对安装于轨道两侧的软磁钢产生横向吸力以保持车辆与轨道动态对齐。常导高速磁浮的优点在于无论处于何种速度或停车,车体均能保持悬浮状态,不需要辅助轮,但悬浮和导向需要主动控制。
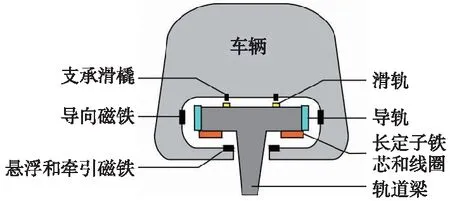
图1 常导高速磁浮技术原理
常导高速磁浮列车利用安装在车辆上的电磁铁与安装在轨道上的定子线圈,构成长定子直线电机系统实现牵引,定子部分沿线路纵向铺设在轨道上。定子由定子铁芯与定子线圈共同组成,当对缠绕在定子铁芯上的三相线圈通电时,线圈在定子铁芯中产生向前的电磁推力。
2 常导高速磁浮与高速轮轨铁路主要技术参数对比
2.1 线路工程
高速轮轨与高速磁浮铁路选线主要技术参数对比如表1所示。高速磁浮由于允许的最大侧向加速度及横坡角高于高速轮轨,因而相同速度情况下,高速磁浮最小曲线半径比高速轮轨小。当速度为350 km/h时,高速轮轨的最小曲线半径为5 500 m,高速磁浮的最小曲线半径则可为2 900 m。此外,由于高速轮轨列车受黏着系数的限制,其爬坡能力小于高速磁浮列车,因而,高速轮轨的最大坡度一般不宜大于20‰,困难条件下不应大于35‰;而高速磁浮的最大坡度则一般不宜大于50‰,困难条件下不应大于100‰。因此,高速磁浮线路选线较为灵活,可以较好地适应地形变化。

表1 线路技术参数对比分析
综上分析,由于相同速度情况下高速磁浮比高速轮轨曲线半径小,爬坡能力强,因而高速磁浮铁路选线较为灵活,可以更好地适应地形变化。对于山区或丘陵地区,可以合理选用桥梁、隧道等形式;对于中心城区,可以采用地下形式穿越,减少工程投资。但由于高速磁浮最大侧向加速度及缓和曲线扭转率等参数大于高速轮轨,因而其旅客乘坐舒适度比高速轮轨略差。
2.2 轨道工程
高速轮轨铁路以无砟轨道结构为主,无砟轨道结构主要由钢轨、扣件、轨道板、底座等组成。目前已形成了以板式无砟轨道和双块式无砟轨道为主的结构体系,如图2所示。轨道工程除钢轨、扣件、轨道板在工厂内利用模具批量生产外,其底座、自密实混凝土等需要现场浇筑和铺设,圬工量大,施工中需借助精密的CPⅢ控制网及精调设备,才能够达到毫米级的施工控制精度。高速磁浮轨道结构主要由轨道梁、功能区、定子铁芯等组成。目前形成了以复合式轨道梁、叠合式轨道梁和梁上轨道板等为主的高速磁浮轨道梁结构体系。高速磁浮轨道功能区包括滑行面、导向面和定子面,如图3所示。

图2 高速轮轨铁路无砟轨道结构
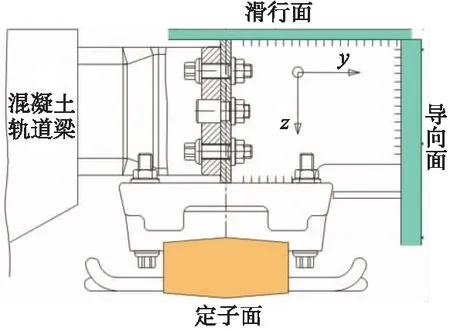
图3 高速磁浮铁路轨道结构
为保证车辆运行舒适性和安全性,高速磁浮与高速轮轨铁路均对轨道铺设精度有一定的要求。类似高速轮轨系统,高速磁浮系统采用轨距、轨向、高低、水平、钳距偏差、错位及与设计位置偏差等指标控制轨面平顺度,高速轮轨与高速磁浮主要技术参数分别如表2、表3所示。

表2 高速轮轨轨道静态铺设精度标准

表3 高速磁浮轨道主要技术参数
综上分析,由于磁浮列车和轮轨列车走行方式的不同,轨道结构在提供基本的传力功能外,还要满足牵引供电、运行控制等系统的需求。因此,高速磁浮铁路对轨道结构平顺性的要求更为严苛。特别是高速磁浮在定子面高低、错位等方面精度达到了0.1 mm级,需要依靠机加工技术才能实现定子面安装。此外,高速磁浮与高速轮轨均需通过设置特殊装置来解决特殊大跨度桥梁由于温度变化引起的系统问题,但高速轮轨相对具有更加成熟的特殊大跨度桥上轨道工程应用经验和解决方案。
2.3 桥梁工程
高速磁浮桥梁结构一般采用梁上轨道梁结构,其中承载梁与高速轮轨一样,由双线箱梁、桥面附属、支座、桥墩及基础等组成;梁上轨道梁类似高速轮轨无砟轨道结构,由轨道功能区和承载结构组成。高速轮轨和高速磁浮桥梁结构横断面分别如图4、图5所示,两者主要技术参数对比如表4所示。
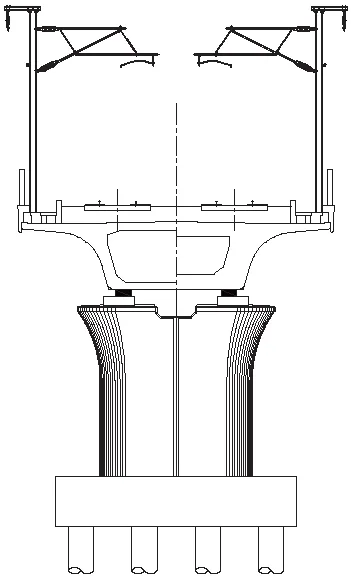
图4 高速铁路桥梁横断面 Fig.4 Cross section of high-speed wheel/rail railway bridge

图5 高速磁浮桥梁横断面Fig.5 Cross section of high-speed railway maglev bridge

表4 桥梁设计技术参数对比
综上分析,对于桥梁自振频率、挠跨比、变形、梁端转角以及下部结构纵向变形等技术指标,高速磁浮相较高速轮轨铁路有更高要求;对于下部结构横向变形和沉降要求等技术指标,高速磁浮与高速轮轨基本相当。轨道梁设计时需要综合考虑自振频率和刚度对工程的影响。
2.4 隧道工程
高速轮轨铁路隧道空气动力学效应主要表现在瞬变压力、洞口微气压波和行车阻力等方面,对行车速度、隧道有效净空、车辆限界面积以及列车密封系数影响较大。为保证列车行车安全和旅客舒适度,同时减小对周边环境的影响,需要通过车内舒适度准则、车辆动态密封指数、隧道最小阻塞比等参数确定隧道最小有效净空面积,并通过设置洞口缓冲结构减缓洞口微气压波问题。两者主要技术参数对比如表5所示。

表5 隧道设计技术参数对比
综上分析,由于高速磁浮设计速度高于高速轮轨,高速磁浮需要更大的有效净空面积降低空气动力学效应,同时对洞口缓冲结构、车辆气密性也提出了更高的要求。此外,高速磁浮需要对隧道内附属结构和设备等进行空气动力学检算,只有在满足强度、疲劳、稳定性指标且确保运营安全条件下,方能进入基本建筑限界和空气动力作用影响线内部。
2.5 牵引供电工程
高速轮轨牵引供电系统主要由外部电源、牵引变电所和接触网等组成,如图6所示。外部三相电力系统经牵引变电所将220 kV/330 kV的三相交流电变换为27.5 kV(或55 kV)单相电,经馈线电缆输送至接触网为电力机车供应电能。高速铁路牵引接触网一般采用AT单边供电方式,在牵引变电所出口及两个牵引变电所之间设置电分相。高速轮轨牵引供电系统通过外部电源电压、供电方式、牵引供电设施分布、牵引变压器接线形式等保证接触网电压水平,从而为动车组提供高质量电能。
高速磁浮牵引供电系统主要由外部电源、主变电所、牵引系统和供电系统组成,如图7所示。其中牵引系统主要由中压环网、牵引变电所、馈线电缆、定子开关站、连接电缆及长定子绕组线圈等组成,为列车运行提供可变频率、相位和电压幅值的牵引电力系统,供电系统则为高速磁浮所有子系统的用电设备和设施提供工频电力的系统。主变电所从公共电网中引入110 kV或以上电压等级的电源后,通过降压变压器降为35 kV(或20 kV、10 kV)中压供电电源。中压供电电源通过中压环网输送至沿线牵引变电所、轨旁变电所,牵引变电所把中压环网中交流电通过输入变压器及整流器降压整流成直流电,再由逆变器逆变为电压、频率可调的三相交流电,后经输出变压器、馈线电缆输送至定子开关站,经连接电缆输送供给长定子绕组线圈。两者主要技术参数对比如表6、表7所示。

表6 高速轮轨牵引供电系统主要技术参数
综上分析,高速磁浮牵引供电系统外部电源电压等级与高速轮轨基本一致,均可为220 kV及以上,但两者在系统组成、供电制式、供电方式、接触网和馈线电缆电压等级上存在较大差异。高速轮轨牵引供电系统通过牵引变电所输出标称电压为25 kV的工频单相交流电;高速磁浮则需先由主变电所将外部公共电网降至35 kV后,通过经中压环网为沿线牵引变电所交直交环节后输出电压等级为0~12 kV(相)、频率为0~356 Hz的三相交流电。
2.6 运行控制工程
高速轮轨铁路运控系统主要由行车调度指挥、列车运行控制、车站联锁和信号集中监测子系统等子系统组成。我国时速250 km以上高速铁路列车运行控制系统采用CTCS-3系统,是基于GSM-R无线通信实现车地信息双向传输,无线闭塞中心(RGB)生成行车许可,轨道电路实现列车占用检查,应答器实现列车定位,ATO实现列车从车站自动发车、区间自动运行、自动停车、自动开门、车门与站台门联动等的列车运行控制系统。
高速磁浮铁路运行控制系统由中心调度指挥、地面轨旁控制、车载设备、车地无线通道等子系统组成,实现列车运行的安全防护、过程控制和自动调度等。目前,上海高速磁浮示范线和青岛四方高速磁浮试验线的运控系统均是以牵引分区为地面控车核心的分散控制模式,该模式由中央运行控制、分区运行控制、车载运行控制和车地无线通信等子系统组成。主要技术参数对比如表8所示。
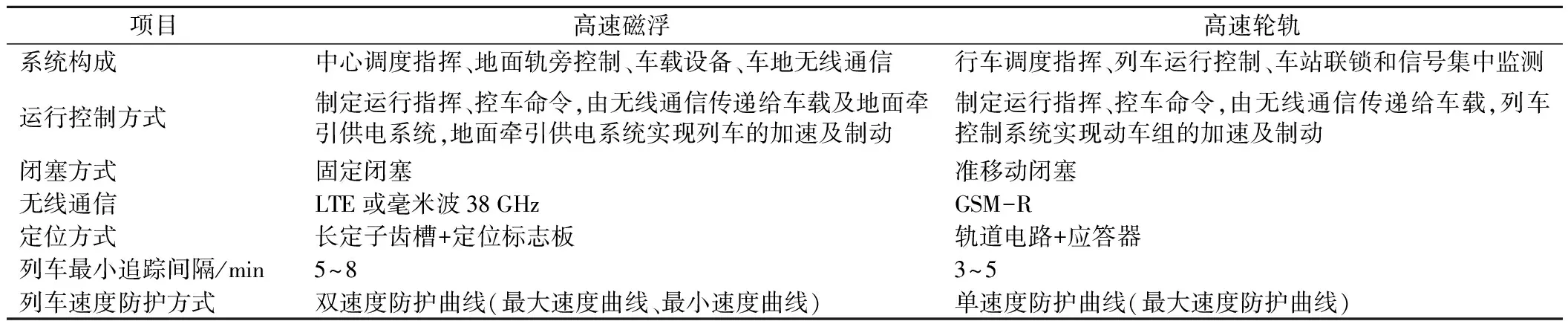
表8 运行控制系统主要技术参数对比分析
综上分析,高速磁浮与高速轮轨铁路运行控制系统的主要区别在于列车控制方式、闭塞方式、测速定位方式等方面。高速磁浮列车控制是信号控制、无线通信、牵引供电3个子系统单元安全耦合的集成,其命令与控制间通过无线通信衔接;其次,高速磁浮闭塞方式采用固定闭塞方式,1个分区只能有1列车运行;然后,高速磁浮测速定位方式采用相对位置检测配合绝对位置误差校正,通过车载相对位置传感器感应线圈输出信号的相位和周期实现相对位置检测,通过接收定位标志板发送的固定位置信息数据报文,实现列车的定位和误差校准。此外,高速轮轨以车站或集中站为单位,设置相应的运控设备,高速磁浮较高速轮轨地面设备多、分布广。
2.7 无线通信工程
高速磁浮铁路通信系统与高速轮轨相同,包括车地无线通信系统和基础设施通信系统两部分,其中基础设施通信系统主要包括主干传输网、电话系统、视频监控系统、电源及接地系统等子系统。目前,高速轮轨无线通信系统采用GSM-R系统,系统应提供语音通信、调度通信、列车控制数据传输、调度命令和无线车次号校核信息传递等业务,而高速磁浮铁路无线通信系统则采用LTE或毫米波38GHz技术。两者主要技术参数对比如表9、表10所示。

表9 高速轮轨系统无线通信主要技术参数
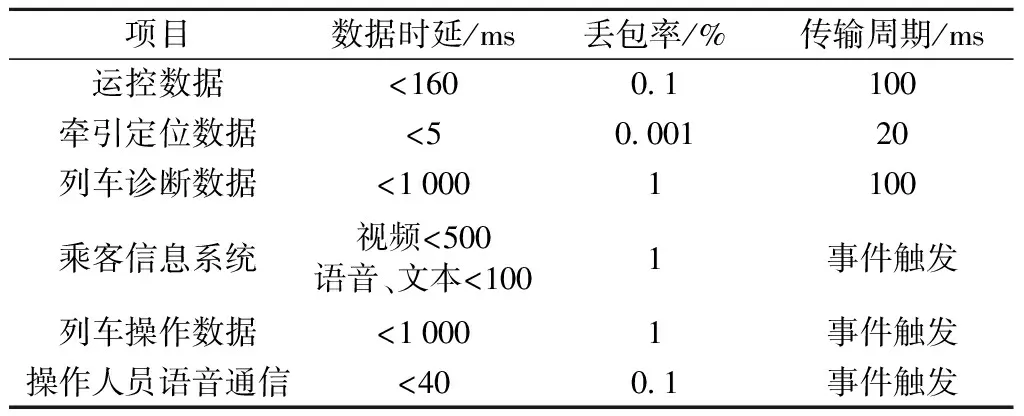
表10 高速磁浮系统无线通信主要技术参数
综上分析,高速磁浮铁路车地无线通信数据传输性能与高速轮轨铁路有着较大的差别,高速磁浮铁路对传输时延等通信技术参数有着更高的要求。高速轮轨铁路GSM-R无线通信系统的数据时延、丢包率等技术参数尚不能满足高速磁浮无线通信要求。此外,考虑上海高速磁浮示范线38 GHz微波通信技术尚未经时速600 km高速磁浮实践验证,未来需要对5G、38 GHz微波通信、LTE等无线通信技术在时速600 km高速磁浮中应用进行深化研究。
3 结论
高速磁浮利用非接触电磁力实现列车的悬浮和导向,采用长定子直线电机及地面牵引控制系统实现列车运行状态的控制。通过常导高速磁浮与高速轮轨主要工程技术参数分析,得出主要结论如下。
(1)高速磁浮对轨道功能区有严格的制造精度要求,其轨道梁功能区需采用机加工方式实现精度控制。
(2)高速磁浮轨道梁具有更为严格的变形、频率要求,轨道梁设计时需要综合考虑自振频率和刚度对工程的影响,桥梁一阶竖向自振频率不小于1.1v/L。
(3)为降低隧道内空气动力学效应,高速磁浮需要更大的有效净空面积,同时对洞口缓冲结构、车辆气密性也提出了更高的要求。
(4)由于高速磁浮采用地面控制,1个分区只能有1列车运行,其信号控制、无线通信与牵引供电3个子系统间耦合更为紧密,对车地无线通信数据传输性能也提出了更高的要求,牵引定位数据时延要求不大于5 ms。
