倾转旋翼飞行器设计
2023-11-10陈雨欣
刘 康 余 杨 陈 勇 陈雨欣
(1.湖北汽车工业学院,湖北 十堰 442002;2.武汉工程大学,湖北 武汉 430205)
0 引言
旋翼式无人机是无人机的一种类型,依靠一个或多个旋翼为机体提供升力和动力。随着无人机在不同领域中的应用不断深入,旋翼式无人机以其独特的空中悬停能力、较固定翼式无人机更优良的低空低速特性、对起降场地的低要求、极佳的机动灵活性及高可靠性而得到越来越多使用者的青睐,从而被广泛应用于各行各业中。
1 倾转旋翼无人机
在信息化、智能化技术飞速发展的今天,无人机的应用范围也越来越广,无人机向专业化、精细化和功能化方向发展。
在倾转旋翼机达到一定速度后,旋翼轴可向前倾转90°角,呈水平状态,将旋翼当作拉力螺旋桨来使用,此时倾转旋翼机能像固定翼飞机那样,以较高速度进行远程飞行,其具有普通直升机垂直起降和空中悬停的能力及涡轮螺旋桨飞机高速巡航飞行的能力。采用新思维来设计直升机的旋翼和总体布局,设计思想已突破传统直升机范畴,是直升机技术发展的必然结果[1]。
2 倾转旋翼无人机总体结构设计
本研究设计并制作出一款多功能倾转旋翼无人机,着重分析倾转旋翼无人机的硬件结构设计方案、飞行控制硬件的电路搭建设计与分析,并完成整机飞行控制系统的设计与搭建。
倾转旋翼无人机使用的是新型倾转飞翼式布局,由三轴螺旋桨提供拉力,并能进行多旋翼模式操作,包括垂直降落、空中悬停、翻滚、偏航、前进和后退操作,经过渡模式转换为固定翼模式,飞翼飞行采用全电机、双电机或单电机,进行高速、中速、低速的高续航飞行,从而使无人机具备多旋翼飞行器的垂直起降功能和固定翼飞行器高速、远距离、高续航飞行的飞行能力。无尾固定翼和机身融为一体,有良好的空气动力学外形,在有较高升阻比的同时,可减少气流产生的干扰。
本研究设计的倾转旋翼无人机采用“三旋翼+无尾飞翼式”布局。当三旋翼为垂直起降模式时,无人机对起降、悬停等动作提供动力支持。3 个倾转舵机带动电机进行相应模式切换。根据外形参数,用CATIA 软件来绘制出三维模型,在CATIA 软件中选用外形材料,从而计算出机体的转动惯量。外壳采用轻质PLA 材料(密度为0.6 g/cm3左右),内部结构采用轻木框架(密度为0.25 g/cm3左右),并以碳纤维管为机构支撑。整机估算重量为3 kg,无人机机架结构装配如图1所示。

图1 无人机机架结构装配(单位:mm)
3 倾转旋翼无人机硬件设计
本研究以Arduino mega 2560 开发板为主控板,搭载飞行系统,作为飞行控制系统数据交汇的硬件计算中心。由于主控板的I/O端口丰富,在接收到接收机数据信号和传感器姿态数据信号的同时,也会输出相应控制命令到执行机构,从而实现倾转旋翼无人机的机动。
3.1 传感器选择
采用GY-86 集成传感器,其集成了MPU6050 模块、MS5611 模块和HMC5883L 模块,使用方便,能减少传感器数据噪声,节约成本,同时使多功能倾转旋翼无人机接收到更为准确的姿态数据,可减少独立式传感器信息集合产生的干扰。
使用MPU6050 六轴(三轴加速度+三轴角速度陀螺仪传感器)姿态传感器,且含有一个第二IIC 接口,可用于连接外部磁力传感器,由“MPU6050+地磁传感器”通过卡尔曼滤波来计算姿态角。MPU6050自带数字运动处理器(DMP),通过IIC接口可向CPU提供四元数转欧拉角,即航向角(yaw)、横滚角(roll)、俯仰角(pitch)。
MS5611是一款高分辨率的气压传感器,分辨率可达10 cm。支持IIC 和SPI 通信协议,传输速率可达20 MHz,可设置其转换时间。测量范围为10~1 200 mbar。通过无人机上搭载的传感器模块和GPS模块配合,用于测量海拔高度、悬停等操作。
HMC5883L 是一款三轴磁场传感器,采用IIC 通信协议,传感器中的航向角是方向与磁北的夹角[2-3],可为无人机提供导航方向,和GPS 搭配使用,提供自主导航数据。
3.2 电源模块设计
该无人控制系统采用的是独立电源供电,独立电源的满载电源为6.6 V,超过控制系统所需电压,传感器产生的数据易受电压波动的影响。GY-86传感器作为感知倾转旋翼无人机姿态的主要感知器,要尽可能减少因电源电压波动而产生的数据噪声,从而避免数据波动对无人机飞行系统控制计算产生的不利影响。在应用卡尔曼滤波算法时,同样要尽可能保证传感器传输的数据有效准确。减少传感器误差,保证增强位置的连续性和稳定性,能更加准确地输出载体位置,提供硬件支持。
本研究采用6.6 V 的独立控制电源,通过5 V 稳压模块进行降压、稳压处理,并连接到MEGA 板的POWER 区域的5 V 和GND 的紧邻区域,对其进行供电。连接GY-86 传感器,将传感器和飞控板的对应电源区域进行对应连接。3.3 V 和GND 分布在5 V GND 两侧,由飞控板对传感器进行供电,SCL 和SDA分别连接到对应点上。I2C总线上传送数据,先发送最高位,由主机发出启动信号,SDA 在SCL 高电平期间由高电平跳变为低电平,然后由主机发送一个字节的数据。数据传送完毕后,由主机发出停止信号,SDA 在SCL 高电平期间由低电平跳变为高电平。按照上述过程可完成飞控板和传感器的通信[4]。
3.3 接收与执行机构
接收机将接收到的发射机信号转换成PWM 波控制命令,并对执行机构发出动作指令。由于飞控的介入,所发信号连接至飞控进行模拟信号的输入。
执行机构的信号线连接到飞控板的PWM 区域,飞控板将计算处理过的命令通过各个端口对每个执行机构分别发送独立的PWM 信号,对其分别进行精细的独立控制,协调整个执行机构系统,从而完成一系列复杂的飞行机动动作。由于电调需要接地线才能组成一个完整的闭环信号系统,所以PWM 区域的左侧飞控板提供地线端口,各个执行机构的地线将集成为一束,并与GND 接地端口连接在一起,从而形成完整的闭环信号。
独立控制系统采用单向开关对控制系统进行开关机操作。电机和电调接线端通过正反接可实现电机的正反转。根据各个电机的位置,分别对每个电机进行正反接操作。飞行控制硬件电路设计如图2所示。

图2 飞行控制硬件电路设计
4 倾转旋翼无人机软件设计
控制逻辑与控制算法是飞行控制系统的核心,飞行控制系统是飞控硬件应对各种指令信号的中央处理系统,控制逻辑与算法的合理性将直接关系到多功能倾转旋翼无人机飞行器在面对各种飞行工况时的应对能力。飞行控制系统的控制逻辑与控制算法是飞行器处理各种问题信号的应对公式,通过各个模块信号来模拟分析出姿态情况,从而计算出当前及预估情况给出的计算输出数据信号的计算控制框架。
三轴倾转旋翼无人机启动后对各项硬件进行参数数据初始化,启动开机自检,默认垂直起降多旋翼模式。本研究设计的倾转旋翼飞行器有3 种飞行模式,根据应用场景,可在3种模式中自由切换。
4.1 多旋翼模式
当无人机处于多旋翼模式时,倾转舵机处于垂直状态。飞行器通过多旋翼产生的升力来克服飞行器的自身重力,并通过旋翼转速变化来产生升力差,可实现无人机的起飞、飞行姿态的改变、前进后退、俯仰、翻滚等动作。
多旋翼控制器内部细分为高度控制器、位置控制器、姿态控制器,可实现多旋翼模式下飞行器的悬停、定高、横滚、俯仰和偏航等功能。
4.2 过渡模式
过渡模式为倾转舵机从垂直状态到水平状态的过程。在多旋翼模式向固定翼模式飞行过渡时,多旋翼产生的升力会在一定时间内全部转换成向前的拉力,巡航速度会大幅增加,但操控难度也会随之增加,且过渡过程中会产生飞行失速的问题,倾转过快或过慢、电机转速的高低变化都会使飞行器的飞行状态急剧变化,从而使无人机出现不可控状态。将姿态PID 控制器应用到信号处理中,对倾转舵机倾转速度、动力电机的转速高低进行微调,从而使飞行器的飞行状态保持稳定,使飞行器不进入失速区间,保证飞行器的飞行安全。
倾转过渡控制器可细分为倾转舵机角速度控制器、角度反馈控制器,可控制倾转舵机在不同角度范围内使用不同的角速度转动,防止旋转力矩对飞行姿态产生影响,并向其选择的控制器反馈角度信息。
连续选择控制器可细分为角度信息收集控制器、判断控制器、姿态控制器,用于收集反馈的倾转舵机角度信息,通过逻辑控制在不同阶段介入不同飞行模式,从而控制器助力飞行器的正常飞行。
4.3 固定翼模式
当无人机处于固定翼模式时,倾转舵机处于水平状态。飞行器通过机翼来产生升力,全部电机会产生向前的拉力,以克服前进的阻力。飞行器可通过调节各个动力电机的转速和控制舵板舵机来改变机身蒙皮外流体的流速,从而对飞行器的飞行姿态进行控制。飞控系统如图3所示。
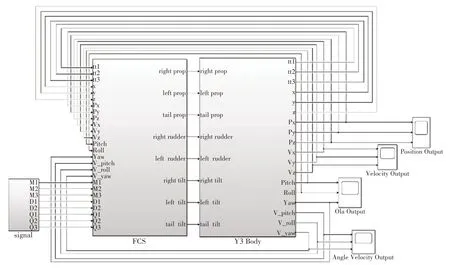
图3 飞控系统
固定翼控制器内部集成有姿态控制器,可实现控制固定翼模式下的俯仰、横滚和偏航等能力。
倾转旋翼无人机有两种飞行模式,即固定翼模式和多旋翼模式。因此,在飞行控制中,搭建连续性选择控制系统,通过遥控发射机的开关通道来产生拨杆开关信号,同时开关通道与倾转舵机的控制信号绑定,在倾转舵机不同角度下,可接入不同的控制模型。在过渡模式状态中,由于倾转舵机的角度发生变化,产生的升力也会随之变化。因此,要在倾转过程中使转速发生一定变化,通过改变升力的大小来适应飞行姿态的变化。
通过设计单独的倾转过渡控制器,用三角函数进行数据分析计算。在多旋翼模式到固定翼模式倾转过程中,桨叶产生的升力会逐渐转变为向前的拉力。在垂直模式向固定翼模式,即升力向拉力转变过程中,要达到固定翼模式下的失速下限,此时升力还是主导力。固定翼模式转换为多旋翼模式时,情况相反。
经过上述分析,给出过渡控制器的需求和执行工作。在多旋翼模式转换为固定翼模式时,要在前半段进行速度较快的切换,后半段逐渐减速,直至到达指定角度。
4.4 飞行模式切换算法程序
首先,将通过模块函数解算出的传感器四元数转换为姿态数据。其次,进入循环读取区间,对一些操作进行通道设置,用于切换飞行模式和飞行姿态。默认为垂直模式,若为垂直模式,对姿态PID 控制器进行设置。在垂直模式中还有定高模式,切换到定高模式,系统会读取当前传感器数据,获取气压传感器数据,并计算当前高度,通过陀螺仪加速度计等进行辅助控制,进入位置PID 控制器和高度PID 控制器,将计算出的数据发送至动力模块。若为固定模式,进入到固定翼模式姿态PID 控制器设置中。在垂直模式中,有自稳和定高2 种飞行模式,因此配备2 种动力分配输出表对电机和舵机进行配合控制。在固定翼模式中,通过动力分配输出表对电机和舵机进行控制。最后,判断飞行器状态和输出情况。在锁定状况下,通过发射机发送指定的解锁指令,电机进入怠速或停机状态。解锁状态下,电机中断程度正常使用。部分状态切换控制程序如下。
1.if(loop_cnt%2)//100 Hz
2.{
3.FlightStateTask(0.1);//10 ms 执行一次进行飞机锁定与加锁状态
4.FlightTask(CHdata[AUX1],1);//飞行模式取反变为-1 自稳/定高
5.ModeTask(CHdata[AUX2],-1);//倾转姿态取反变为-1垂直/水平
6.
7. if (myabs (CHdata [AIL]-remote_normal_value)<=remote_dead_zone)CHdata[AIL]=remote_normal_value;//副翼死区设置
8. if (myabs (CHdata [ELE]-remote_normal_value)<=remote_dead_zone)CHdata[ELE]=remote_normal_value;//升降舵死区设置
9. if(Mode ==Vert)//垂直状态
10. { //外环PID计算
11. //ROLL 外环X轴
12. PID_Set(&(roll. outer),limf((CHdata[AIL]-remote_normal_value)/30.0f,-16.0,16.0),0,-ang.Y,5.0,100.0,10 000.0);
13. roll.outer.Output=PID_Postion_Cal(&(roll.outer));
14. //PITCH 外环X轴
15. PID_Set(&(pitch.outer),limf(-(CHdata[ELE]-remote_normal_value)/25.0f,-20.0,20.0),0,ang.X,5.0,100.0,10 000.0);
16. pitch. outer. Output=PID_Postion_Cal(&(pitch.outer));
17. //YAW 外环,限制在±10 度左右
18. yaw_desire=(CHdata[RUD]-remote_normal_value)/50.0f+ang.Z;
19. if(yaw_desire >180)yaw_desire-=360;
20. if(yaw_desire <-180)yaw_desire+=360;
21. PID_Set(&(yaw.outer),0,yaw_desire,ang.Z,5.0,100.0,10 000.0);
22. //PID_Set(PID_DATA*data,float Input,float Desire,float Measure,float IntDifZone,float Integral_max,float OutLim)
23. yaw.outer.Output=PID_Postion_Cal(&(yaw.outer));
24. if(FlightMode==AltHold)
25. {
26. getAddData(&add);//得到气压、气压高度、GPS相关数据
27. AltDataDeal();//计算Z 轴速度,Z 轴高度测量
28. barAltHeightOut=PID_Postion_Cal(&barAlt HoldHeight); //高度环计算
29. barAltHoldRate.Desire=barAltHeightOut;//高度环输出为速度环入
30. barAltRateOut=PID_Postion_Cal (&barAlt HoldRate); //速度环输入
31. AltHoldChange();
32. }
5 实物设计
以轻木作为机身的主体材料,使用碳纤维型材、舵机、倾转舵机、动力电机、电调、Arduino mega 2560板和独立的动力电源控制电源等来构建无人机的基本结构。实物图如图4所示。
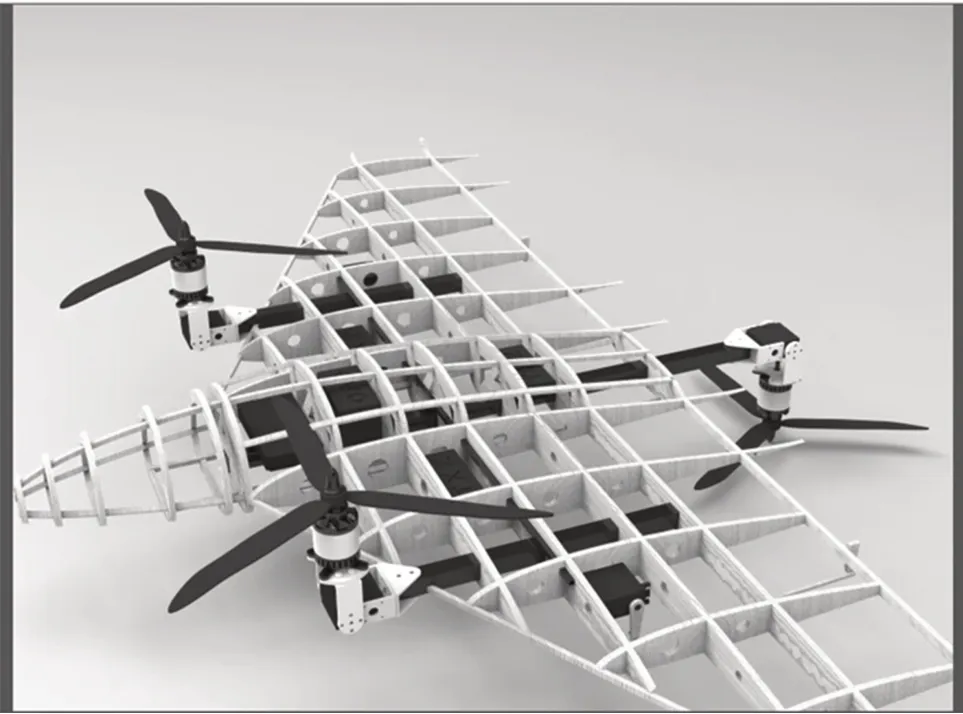
图4 实物图
6 结语
本研究设计的无人机为多旋翼与固定翼飞行器的有机结合物,能将二者的优异性很好地结合在一起,其垂直起降能力和远距离续航能力在某些细分应用领域中拥有无可比拟的优势。
研究中采用工业设计软件(如CATIA、Solid-Works、CAD 等)进行前期设计分析工作,为后期试制提供技术支持。在飞行系统搭建中,基于模型的设计思路,采用MATLAB Simulink 来构建倾转旋翼无人机飞行控制系统的模型。
研究结果表明,无人机构型设计合理,力学分析达到设计要求,通过电路搭建、连接、模型的设计烧录、3D 打印,最终设计出低成本的垂直起降和远距离续航的倾转旋翼飞行器,在侦查或救援领域具有重要的实用价值。
