基于改进冲突搜索的智能车库多AGV路径规划*
2023-11-09任明辉
任明辉,梁 军,陈 龙,张 春,王 云
(1.江苏大学汽车工程研究院,镇江 212013;2.宝胜系统集成科技股份有限公司,扬州 225800)
前言
近年来,基于自主引导车(automated guided vehicle,AGV)的智能车库(robot-based intelligent garage,RIG)成为智能交通与智慧导航领域研究热点。RIG 通过多AGV 搬运以实现车辆的存取过程,用户仅需在RIG 摆渡区进行车辆交换[1],提升了车辆停车便捷性,减少了停车场内部由于人为操作导致的冲突问题,提升车辆存取效率和车位供给量,是缓解城市“停车难”问题理想的停车方式。
RIG 兼具高效性和安全性的特点,通过RIG 停车管理系统为AGV 指派停车任务,并规划无冲突路径[2],其中包含的多AGV 路径规划是一项至关重要的技术。目前,多AGV路径规划常用时间窗[3]、交通规则[4]等方式解决多AGV 存在的冲突问题,能够满足小规模AGV 系统的无冲突路径规划问题,但是无法满足AGV规模逐渐庞大的智能车库系统。
目前研究学者将多AGV 系统建模为多智能体路径搜索(multi-agent path finding,MAPF)问题,将AGV 看作智能体来求解,在已知环境中为一组智能体搜寻无冲突路径,同时最小化AGV 运行时间总和[5-6]。CBS(conflict-based search algorithm)算法是一种领先的两级搜索算法,用于优化求解MAPF 问题,其核心思想是独立地为每个智能体规划一条路径,然后通过分支解决智能体之间的冲突[7]。Boyarski 等[8]将增强、元代理和绕过冲突措施等改进的研究成果引入到CBS 算法中,能够减少CBS 的运行时间,但是并未考虑到任务执行优先级和AGV 的实际冲突类型对CBS 的影响。Okoso 等[9]将CBS 算法应用到具有任务执行优先级的自主代客泊车系统,然而考虑的冲突类型和冲突解决措施相对简单。RIG 属于AGV 代客泊车系统,需要AGV 对车辆进行搬运,现有研究很少考虑到任务分配过程对多AGV路径规划的影响,且提出的冲突解决策略并不适用RIG环境。
针对具有任务执行优先级的RIG 系统,在分析RIG 实际冲突特点的基础上,引入基于备用区域搜索策略和旁路规划策略协同的冲突消解方法,提出了一种基于改进CBS 的路径规划算法,为RIG 规划多AGV无冲突路径。
1 RIG停车环境分析
1.1 RIG冲突类型分析
如图1 所示,应用平行式车位布局的RIG 的车位布局方式与AGV 的运行方式息息相关,AGV 通常采用麦克纳姆轮底盘,可以全向移动,能够较为容易实现平行停车。在多AGV 搬运车辆任务过程中,AGV 间的冲突可分为对向冲突、交叉口冲突、停车冲突和跟随冲突4 种类型。对向冲突通常出现在两辆AGV相向通行同一AGV通道的情况,如图2(a)所示,它是一种典型的死锁现象,要求冲突的一方退出当前路径才能解决冲突,而不能通过等待操作解决。鉴于AGV 运行特点,RIG 交叉口位置在同一时间步长内仅允许一辆车通行,当多辆AGV 同时通行交叉口时,交叉口冲突即会产生,这是RIG 中较为常见的冲突类型,如图2(b)所示。在AGV 执行存取车任务进入或离开停位时,会占用AGV 通道并阻碍其他AGV 的正常通行,便会产生停车冲突,如图2(c)所示。倘若一个AGV 占用另一个AGV 在上一时间步占用的节点,两辆AGV 便会发生冲突,记为跟随冲突,如图2(d)所示。
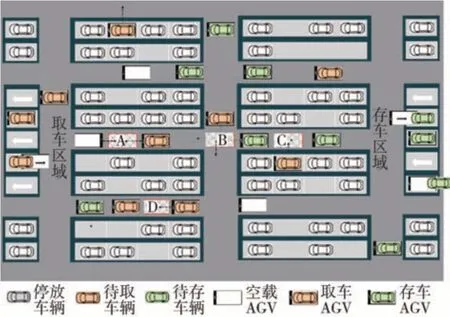
图1 RIG典型场景

图2 多AGV典型冲突类型
1.2 RIG路径规划问题描述
面向RIG 的多AGV 路径规划可以描述为多智能体路径搜索MAPF 问题,由无向图G(V,E)(其中V表示顶点集,E表示边集),一组负责执行停车任务的m个AGV 集A={a1,a2,…,am}以及一组待执行的实时停车任务T={τ1,τ2,…,τn}所构成。当ai被指派完成任务τk时,从初始停车位置oi出发,然后前往取车位置bk搬运车辆,最后达到车辆的目标停放位置gk。在RIG 中,AGV 的最大装载车辆数为1,且每个任务仅由一辆AGV 执行。当停车任务数量大于AGV 数量时,多于AGV 数量的任务只能在RIG 外等待,并不会影响RIG 内的AGV 运行情况,故假定m=n。AGV 运动机构通常选择麦克纳姆轮机构,可实现全向移动,有前进(Ad)、后退(Re)、向左横移(Lt)、向右横移(Rt)以及原地等待(Wp)等操作,且在每个时间步长内,AGV 均执行移动或等待操作。MAPF 的目标就是以最小化AGV 运行时间总和(sum of costs,SoC)为目标,搜索满足所有AGV 的无冲突路径,其目标为寻找最优的集合π*使SoC最小[10]:
2 RIG多AGV路径规划模型
针对RIG 中AGV 的任务执行优先级问题,提出了基于改进冲突搜索的路径规划模型(improved conflict-based search with priority,iCBS-pri)。该改进模型主要由任务分配(task allocation,TA)、单AGV 路径规划(path planning,PP)、多AGV 冲突检测与解决(conflict detection and resolution,CDAR)3 个模块组成,最终生成多AGV无冲突路径集合π*,如图3 所示。TA 将未分配任务分配给AGV,本文所提的TA 模块的任务执行优先级不受任务分配过程中任务与AGV 的距离影响;PP 模块是iCBS-pri下层搜索算法的主要内容,所提PP 模块通过设置直线惩罚函数,减少路径的转弯次数对AGV 运行时间的影响,以提高AGV 任务完成效率,最小化AGV 的SoC为目标;CDAR模块包括冲突检测(conflict detection,CD)子模块和冲突解决(conflict resolution,CR)子模块。CD 子模块根据RIG 实际情况,通过检测参与冲突的AGV 运动状态以此确定实际冲突类型;本文改进的CR 子模块针对CD 子模块检测出的冲突类型,制定基于备用区域(spare zone,SZ)和旁路规划(bypass,BP)的冲突解决策略,以规划多AGV 无冲突路线。
2.1 TA模块
TA 在MAPF 问题中起着重要作用,它涉及如何在任务集T中的待分配任务分配给AGV集A中AGV。TA 根据AGV 的初始位置和待分配任务的初始位置间的距离进行分配,以减少AGV的无效运行路径,提升RIG的整体运行效率。同时,每个未分配的任务都与RIG 中任务执行优先级相关联,任务执行优先级不受任务分配过程中任务与AGV 的距离影响,能够以优先级排序的形式处理AGV间的冲突现象。
为提升停车场收益,停车会员收费是一项有效的措施[11]。在RIG 中,停车会员需要额外的费用,会员用户停车任务也应具有更高的执行优先级。由于RIG 任务存在执行优先级,在CBS 设计时应充分考虑到优先级对整体规划的影响,且在任务分配时不能影响任务原有的执行优先级。任务优先级pri={p1,p2,…,pn}是AGV 任务集T中任务执行次序的集合,如果,任务τk的优先级就比高[12]。通过给定任务优先级的集合pri,以piTi计算冲突过程中的时间成本消耗。具有优先级的MAPF 问题的目标就是寻找集合π*使SoC最小:
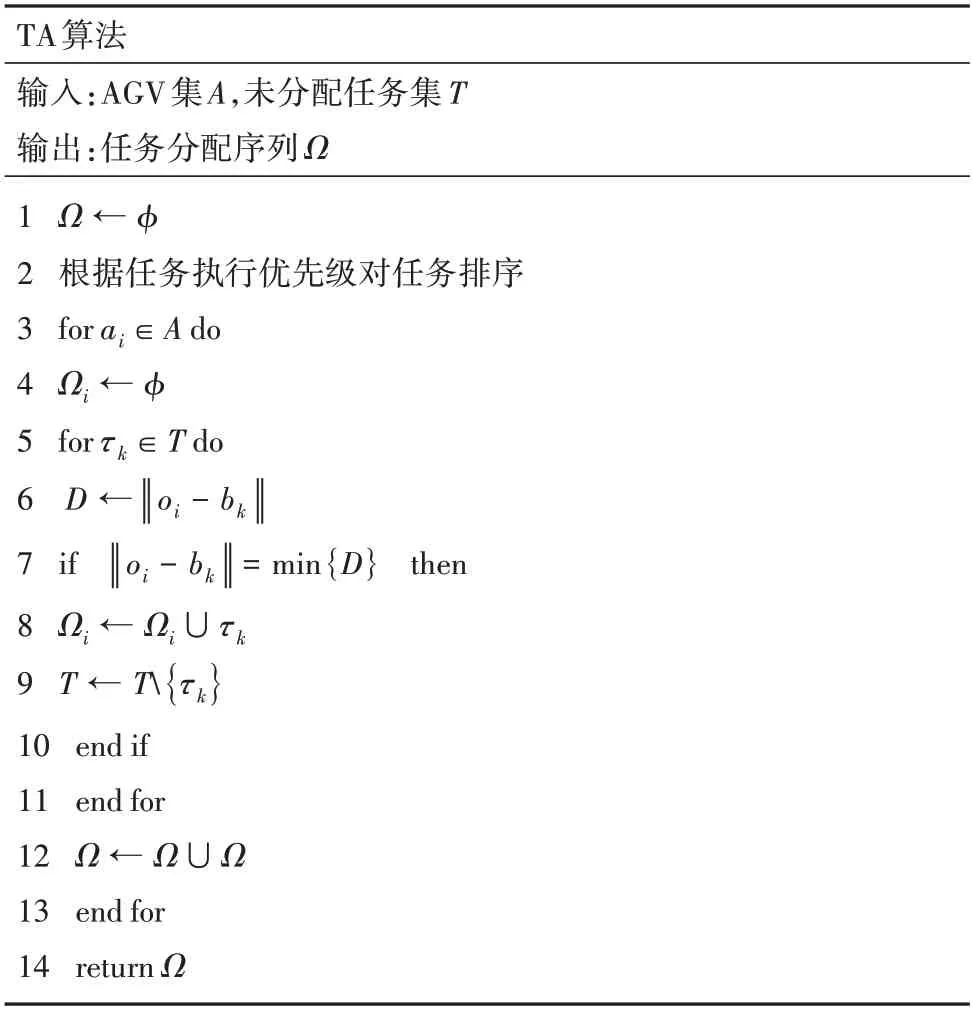
以AGV 的初始位置oi与未分配任务的初始位置bk间的距离为评定标准,将未分配任务分配至距离该任务最近的AGV。由于AGV 的数量有限,当任务的数量多于AGV的数量时,超出AGV数量的任务将等待第二次分配,并根据用户类型赋予优先级系数。如下的TA算法阐述了任务分配的具体流程。
2.2 PP模块
在RIG 中,将任务集T中的所有任务分配给AGV 集中的AGV 后,PP 模块通过规划无冲突路径导航到指定位置,完成车辆存取任务。在车辆存取过程中,PP 规划的无冲突路径通常由两部分组成:任务搬运路径(oi→bk)和任务执行路径(bk→gk)。由于AGV执行优先级由搬运任务决定,因此AGV在不同路段上具有的优先级可能有所不同,为简化PP模块的算法复杂性,PP 算法规划每一部分的路径,通过在改进的TA 算法中添加距离优先原则,AGV通常会继续完成原先搬运任务。在PP 算法中,对单一AGV规划最优路径,而不考虑其他AGV的影响。
传统A*算法是一种以此选取估计成本最小的节点作为下一步的搜索节点,接着重复此操作直至寻找到目标节点,能够寻找到MAPF 问题的最优解,但是实际规划的路径往往会出现多个拐点[13]。在图论中,拐点的个数并不会影响路径的最优性,而在实际RIG环境中,AGV搬运车辆完成停车任务,属于重载AGV,当AGV 遇到拐点时,AGV 会调节麦克纳姆轮的速度在原地旋转进行方向调整,以此完成转弯动作,会耗费大量时间。因此在实际规划AGV 路径时,既要确保路径最短,又要尽可能选择拐点最少的路径。
传统A*算法的核心是通过指定的启发函数对未遍历的节点进行查询,缩小搜索范围,提升搜索速度,具体表达如下:
式中:f(n)表示从初始节点到目标节点的最低成本估计;g(n)为由初始节点到当前节点的实际成本;h(n)为当前节点到目标节点的估计成本,h(n)也就是启发函数。由于RIG 环境较为规整,且AGV 仅在x轴或y轴方向行驶,为使规划出的路径最短,同时尽可能选择拐点最少的路径,因此选择曼哈顿距离作为启发函数,并在启发式函数中加入惩罚函数o(n),通过计算父节点和子节点的直线度决定惩罚函数值。
本文在选择曼哈顿距离作为启发函数,并在启发式函数中加入惩罚函数o(n)的基础上提出改进后的A*算法表达如下:
2.3 CDAR模块
CDAR 模块需要对各AGV 规划路径,各路径之间难免存在冲突,针对此问题CDAR 模块设计了CD子模块和CR 子模块来消解路径冲突,CD 子模块根据RIG 实际情况,通过检测参与冲突的AGV 运动状态以此确定实际冲突类型,CR 子模块针对CD 子模块检测出的冲突类型,制定基于备用区域和旁路规划的冲突解决策略,以规划多AGV无冲突路线。
2.3.1 CD子模块
PP算法为单个AGV规划路径,但是路径间可能存在冲突现象,冲突检测方法则须正确检测AGV 间存在的所有冲突现象。在CBS 算法中,通过迭代时间步,分析所有AGV 的位置信息以此检测冲突现象,主要有边冲突、点冲突、交换冲突、跟随冲突和循环冲突5种类型,如图4所示。
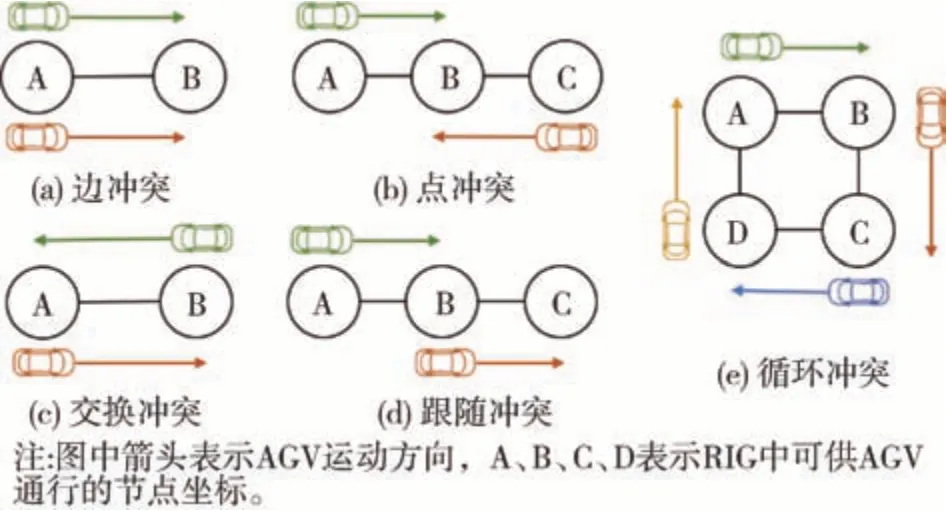
图4 MAPF问题中存在的主要冲突类型
在RIG 中,多AGV 冲突类型通常为对向冲突、交叉口冲突、停车冲突和跟随冲突4 种类型,与MAPF 问题中的点冲突、交换冲突和跟随冲突3种类型对应[14],循环冲突出现频率较低,而边冲突在RIG中几乎不会出现,因此通过检测MAPF 中的冲突类型即可确定RIG 中的冲突现象。πi(t)、πj(t)分别表示ai和aj经过t个时间步长后的位置,并通过πi(t)、πj(t)来描述MAPF问题中存在的主要冲突类型。
(a)边冲突:ai和aj在执行各自的搬运任务时,两辆AGV 在同一时间步以相同的方向通行同一条边(A,B)ϵE,可表示为πi(t)=πj(t) 且πi(t+1)=πj(t+1),如图4(a)所示。
(b)点冲突:ai和aj根据规划路径,两辆AGV 在同一时间步占据同一个节点BϵV,可表示为πi(t+1)=πj(t+1),如图4(b)所示。
(c)交换冲突:ai和aj按照既定的路径,在同一时间步以相反的方向通行同一条边(A,B)ϵE,并实现相互交换位置的效果,可表示为πi(t)=πj(t+1)且πi(t+1)=πj(t),如图4(c)所示。
(d)跟随冲突:当ai计划占用aj在上一个时间步占用的节点BϵV,可表示为πi(t+1)=πj(t),如图4(d)所示。
(e)循环冲突:一组AGV 在同一时间步内,每个AGV 移动到之前被另一个AGV 占用的节点,形成一个“旋转循环”的模式,可表示为πi(t+1)=πi+1(t),πi+1(t+1)=πi+2(t),…,πj-1(t+1)=πj(t) 且πj(t+1)=πi(t),如图4(e)所示。
2.3.2 CR子模块
CR 子模块是对检测的冲突制定一组约束(N.constraints),以成本(N.cost)最小化为目标,为所有AGV 规划一组无冲突路径(N.solution),是CBS 上层搜索算法的关键部分(N表示约束树上的节点)。CBS 上层搜索算法在约束树(constraint tree,CT)上执行最佳的搜索策略,通过生成限制AGV 的约束集来迭代解决冲突现象。从只有一个约束集为空的初始根节点开始,调用CBS 下层搜索找到N.solution,下层搜索评估N.cost最低的节点,然后选择最低的N.cost扩展CT 节点,然后CBS 下层搜索会选择扩展的节点并在N.solution中识别一组冲突N.constraints。如果N.constraints为空,则CBS终止并返回N.solution,否则会随机选择一个要解决的冲突,根据冲突的类型施加约束,并添加到N.constraints中,同时CBS 下层搜索会重新规划N.solution中的路径以适应新添加的约束。以图5为例,a1和a2搬运具有不同优先级的任务,调用下层路径规划算法得到两条路径,在A 点存在点冲突C=,通过拆分节点A以生成两个子节点,每个节点均继承A点的约束集,通过为每个节点添加约束a1或a2在初始位置等待并计算A.cost,可以获得A.solution,其冲突解决措施为a1在初始位置等待1个时间步长。
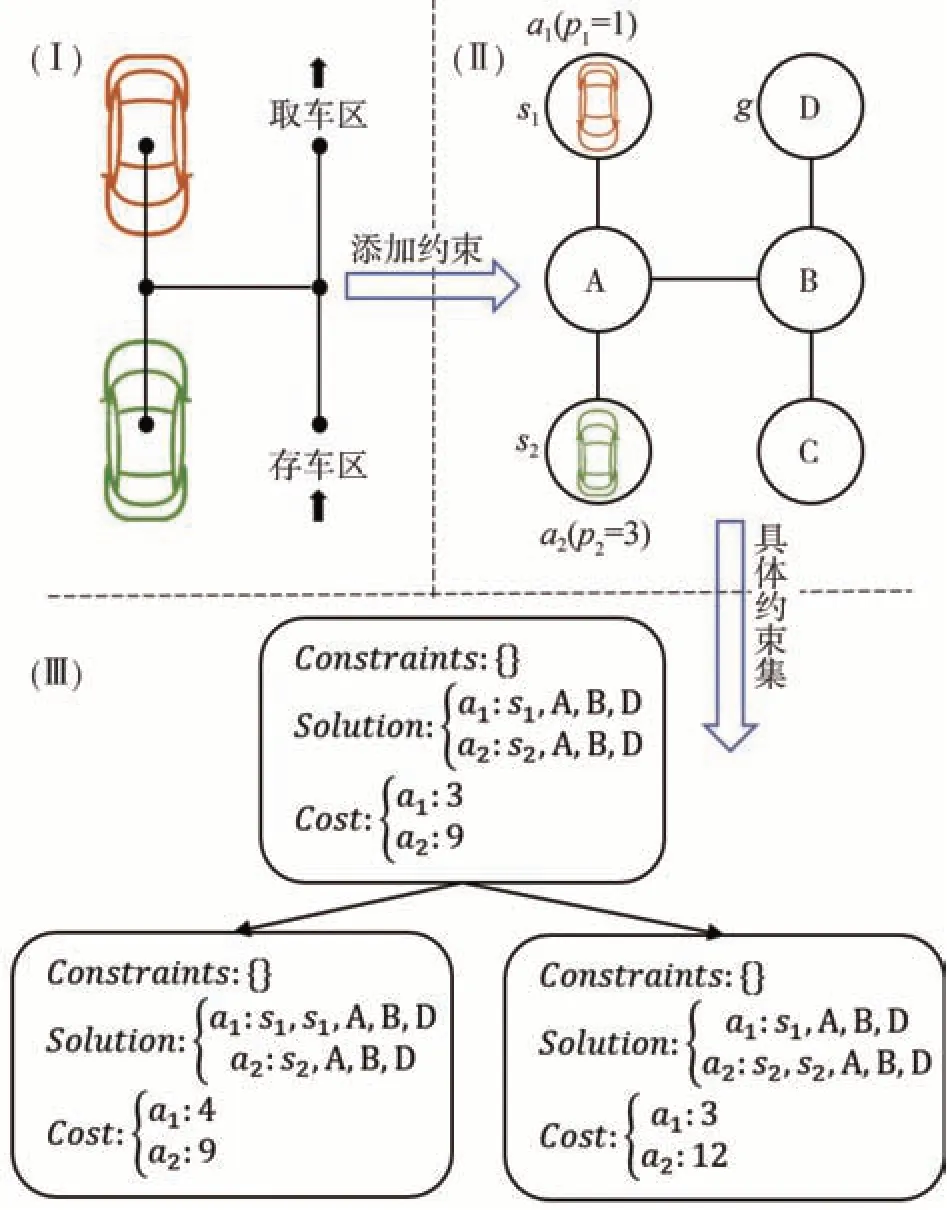
图5 基于CBS的冲突解决策略
在RIG中,所有车辆均需要AGV搬运,且AGV将车辆搬运至指定车位后立即返回指定的停放位置,故AGV有搬运状态和非搬运状态。由于路径规划算法是分段规划,可以通过判断AGV 的初始位置oi和须执行任务的初始位置bk间的距离来实现,即oi=bk时,AGV处于搬运状态,设为hi=1,否则hi=0。
面对AGV 间的冲突,通常办法是约束其中一辆AGV 使其等待,以此来实现冲突解决的目的。然而,对向冲突和循环冲突会使AGV 陷入死锁现象,无法通过等待措施解决该类冲突现象,此时约束其中一辆AGV 退出当前路径,本文提出的冲突解决措施主要有备用区域搜索(SZ)和旁路规划(BP)[15]两种策略。
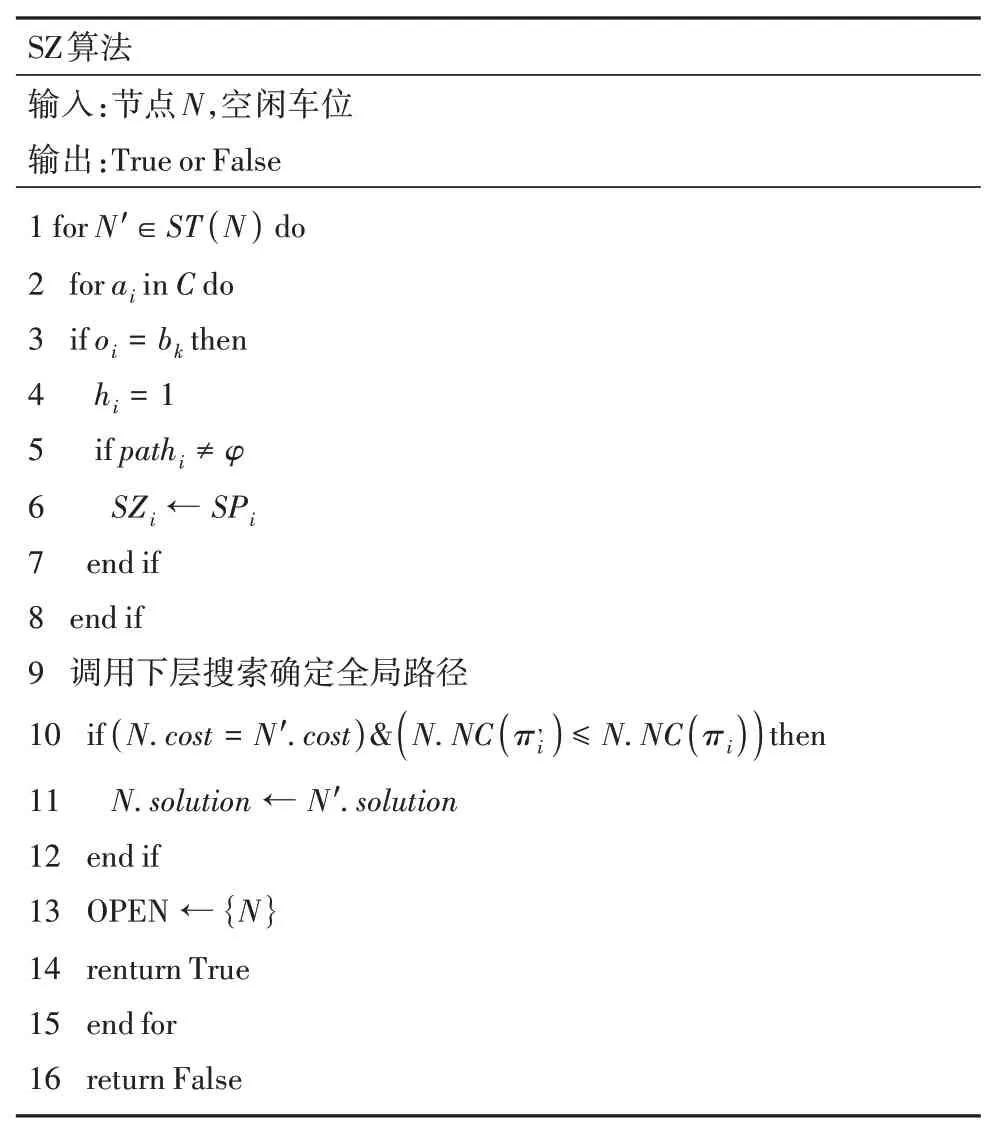
SZ 策略通过为AGV 划分周边空闲区域作为避障区域,以实现冲突解决的目的,仅适用于两辆AGV 冲突的类型[15-16],也是RIG 中最为普遍的冲突类型。由RIG的布局特点可知,对于搬运状态AGV,附近空闲车位可以作为AGV 的备用区域,而对于非搬运状态AGV,所有车位可作为备用区域。然而,如何规划备用区域是一个非常关键的问题。AGV在进入备用区域时须执行转弯操作,根据冲突节点出现的时间步,提前为冲突AGV 划分备用区域,常被设置为车位区域。如下SZ 算法阐述了备用区域搜索策略的具体流程。
BP 策略[17]是通过规划其中一个AGV 的路径,以绕过冲突减少CBS 搜索树的节点数量。由于对AGV 路径再规划,RIG 中所有已知路径均会受到影响,冲突节点的总数量(Number of Conflict,N.NC)可能会增加,会造成时间步长的显著增加。相较于原始路径πi,BP规划出的新路径π,i不能增加新的冲突节点,即N.NC(π,i) ≤N.NC(πi),且满足约束N.constraints。从保持路径最优性的角度来看,在MAPF 问题中必须规划一条有效的旁路,使SoC 最小。当处理节点N上的冲突C时,BP 通过以优先规划N.NC最小的方式遍历节点N的所有子节点ST(N),即N′∈ST(N)且N.NC(π,i) ≤N.NC(πi),然后判断所规划旁路的有效性(BP 算法第3 行),并生成有效旁路的所有节点的集合P。以两个AGV参与的冲突为例,倘若第一个子节点判定旁路有效,则BP 不需要添加任何新的节点,也避免了调用其余子节点的底层搜索。

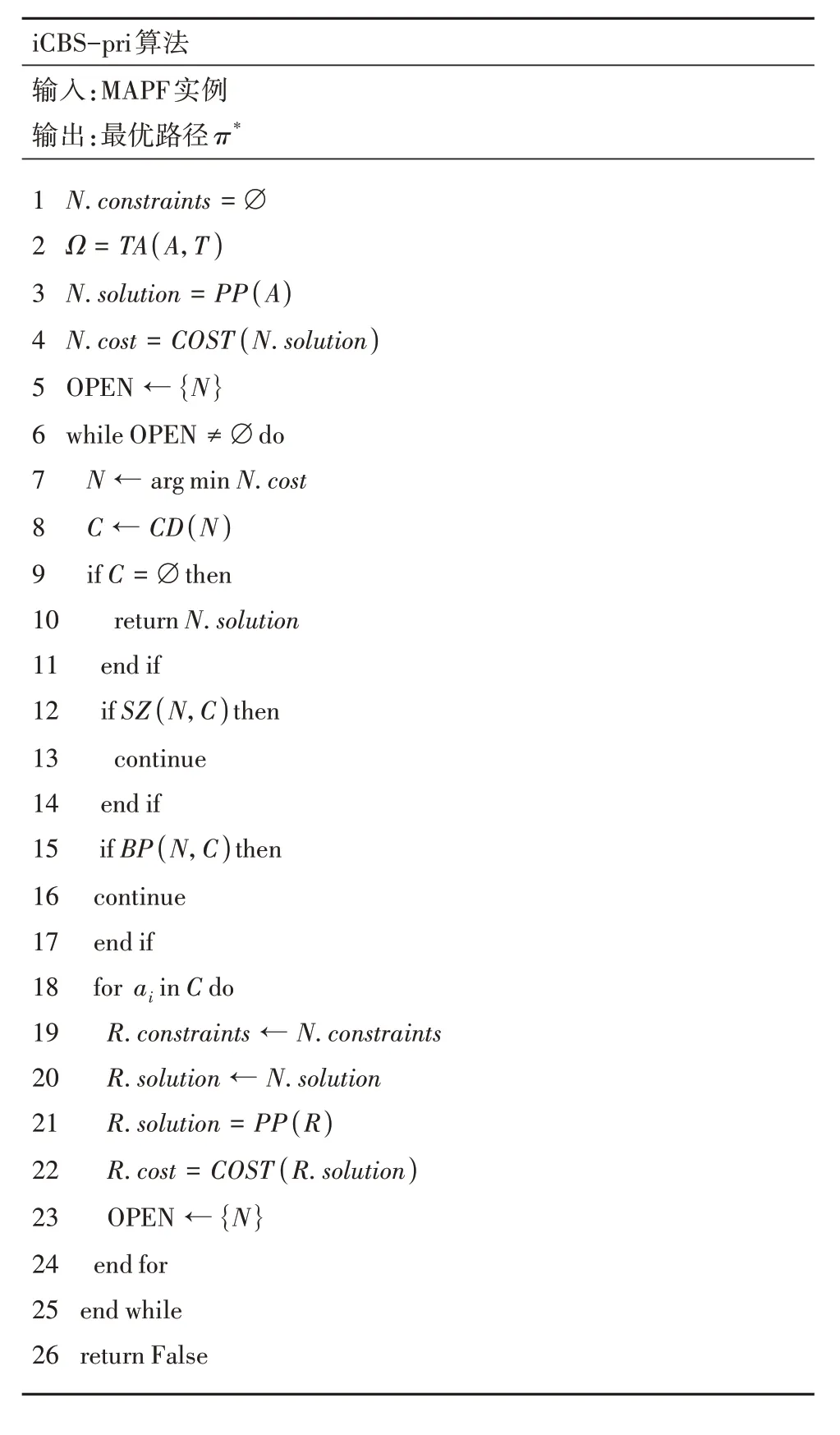
在RIG 环境中,停车冲突类型较为简单,通常采用等待措施来解决,该方法就不再赘述。跟随冲突类型是由于领航AGV 的停止而造成的跟随AGV 与领航AGV 之间的冲突,领航AGV 在时间步长为t时可能存在多个冲突,因此,解决跟随AGV 时,将跟随AGV 解决冲突所需的时间步长计入到领航AGV,以尽可能避免跟随AGV 和领航AGV 的避让操作。对于对向冲突类型,属于死锁,本文针对此种冲突采取SZ 和BP 协同的方式来进行冲突解决,由于SZ 对整体规划影响较小,在N.cost相同的情况下,优先选择SZ,具有高优先级的AGV 具有优先通行权,降低了冲突产生的概率,会减少无关的搜索工作算法。本文采用的备用区域搜索策略和旁路规划策略协同算法能够提升任务规划的成功率,由于搜索备用区域和有效旁路在一定程度上能够帮助算法提前终止搜索或剔除无关搜索工作,从而进一步提升任务规划成功率。如下iCBS-pri算法阐述了冲突解决的具体流程。
3 实验验证
3.1 实验说明
通过构建典型RIG 场景的20×20 栅格地图,每个栅格为边长为1 个单位长度的正方形栅格,黑色和蓝色栅格分别为已占用的停车位和空闲停车位,停车位容量为130,如图6所示,左侧为存车区域,右侧为取车区域。通过随机生成AGV 停车位置的方式重复进行实验100 次,取其平均值作为实验结果,并设定仿真时间为5 min。假设AGV 和任务数量相等,且设定存车任务和取车任务相等。在RIG 车位区域针对存车任务,当任务数量小于或等于存车区域车位数量时,在存车区域随机生成任务初始位置,在RIG 的空闲车位区域随机生成任务目标位置,而当任务数量大于存车区域车位数量时,超出存车区域车位的存车任务数量在下一个时间步随机出现在存车区域的车位位置,任务目标位置仍随机生成在RIG 的空闲车位区域。选取分配成功率、路径长度与转弯次数、冲突类型检测准确率和任务执行成功率等作为评价指标。本文实验是在Windows10 系统下进行,利用MATLAB 2022a 对算法关键组件进行仿真验证,硬件配置为NVIDIA GeForce GTX1060,3 GB 显存,Intel(R)Core(TM)i5-8400 CPU @2.80 GHz×6,16 GB RAM。
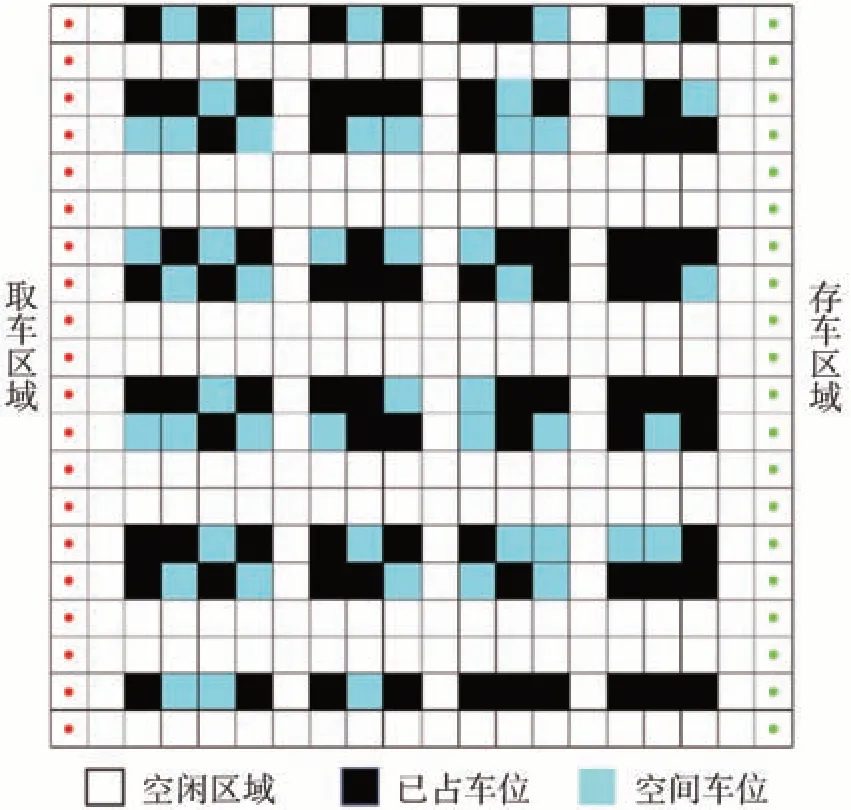
图6 典型RIG场景栅格地图
3.2 实验验证与结果分析
3.2.1 实验一:任务分配算法实验验证
实验验证不同任务数量N的情况下,任务分配算法的有效性。选取任务分配成功率Sta、任务分配一致性Cta和任务平均分配时间Tta作为任务分配算法评价指标,以任务分配成功率Sta和任务分配一致性Cta表示任务分配算法的性能,Sta由成功分配的任务数Ns与任务总数N的比值得到,Cta表征任务的两阶段均由同一AGV执行的概率,由同一AGV执行的任务数量Nτ与任务总数N得到,即
任务分配算法实验结果如表1 所示。不同任务数量N情况下任务分配成功率Sta总是为100%,因为任务数量和AGV 数量相等,且任务分配算法针对每一个未分配任务τk依据距离原则分配给最近的AGV(ai)。任务分配一致性Cta表征同一任务分配给同一AGV 的概率,当任务数量较少N≤10 时,Cta总是接近100%,而N>10 时,由于超出存车区域的车位数量的车辆会在车位空闲时随机生成,存在AGV到达任务初始位置时将该AGV 分配给新生成的存车任务的情况,因此随着AGV 数量的增加,Cta呈现降低趋势且最小为88.9%,从而平均分配时间成本总和Tta也在不断增大。

表1 任务分配算法实验结果
3.2.2 实验二:单AGV路径规划算法实验验证
实验验证改进A*算法与传统A*算法的性能对比,通过随机生成AGV 停车位置的方式重复进行实验100 次,取其平均值作为实验结果,并设定仿真时间为5 min。选择路径平均长度Lpp和拐弯次数Ntpp作为路径规划算法的性能评价指标。具体的实验结果如表2所示。

表2 路径规划算法实验结果
由表2可知,与传统的A*算法相比,添加直线惩罚函数的A*算法在平均路径长度上优势并不明显,而平均拐点数量减少了2.29,拐点数量减少率达38.62%,说明其抑制拐点生成的效果较为明显。
3.2.3 实验三:iCBS-pri算法实验验证
实验通过在CBS 算法中增加SZ 和BP 策略,验证不同冲突消解策略在CBS算法中的作用。选取不同车位占有率(p=30%,60%,90%)下验证iCBS 算法、CBS[10]算法、CBS+SZ[16]算法和CBS+BP 算法的性能,选择任务规划成功率和SoC 作为iCBS 算法的评价指标,并探讨了50%任务具有执行优先级的情况下,优先级对iCBS-pri 算法性能的影响。图7 展示了不同车位占有率(p=30%,60%,90%)以上4种算法随着AGV 数量的增加,对应的任务规划成功率Stp和SoC的实验结果。任务规划成功率Stp由成功规划的任务数量Ntp与任务总数N的比值确定,表征系统在有限时间内的多AGV路径规划性能。
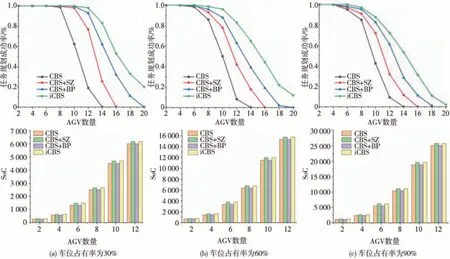
图7 iCBS算法实验结果
图7 所示的实验结果表明,随着AGV 数量的增加,任务规划成功率逐渐减小,而SoC 逐渐增加,这是由于AGV 数量的增加导致了路径规划问题的复杂性,进而使冲突现象明显快速增加。增加BP策略的CBS 算法(CBS+BP)和增加SZ 策略的CBS 算法(CBS+SZ)任务规划成功率明显高于CBS 算法。在p=30%,AGV数量为12时,CBS算法的Stp仅为0.2,而CBS+SZ 算法和CBS+BP 算法的Stp分别达到0.8和0.92,主要是因为搜索备用区域和有效旁路能够帮助算法提前终止搜索或剔除无关搜索工作,从而进一步提升任务规划成功率。BP 策略在解决AGV之间的冲突时使用了有效旁路,而BP算法能够保证AGV 路径的完整性和最优性,因此添加BP 策略的CBS 算法与传统CBS 算法具有相同的SoC,添加SZ策略的CBS 算法与iCBS 算法的SoC 相等。SZ 策略通过搜索附近的可用区域为AGV 规划避让空间,能够增加路径规划的成功率。在p=60%,AGV 数量为12 时,CBS+SZ 算法的Stp仍达到0.45,但会增加CBS 算法的SoC。随着车位占有率的增加,实验中p由30%增加到90%,SZ 策略和BP 策略的可搜索范围逐渐减少,对CBS的贡献逐渐减少,因此各种算法的任务规划成功率之间的差距逐渐减少,iCBS 算法的优越性逐渐降低。
优先级对iCBS 算法的影响如图8 所示。iCBSpri算法的任务规划成功率总是高于iCBS算法,是因为具有高优先级的AGV 具有优先通行权,降低了冲突产生的概率,减少了无关的搜索工作。而由于车位占有率的增加,优先级的影响逐渐减小,两种算法的差距逐步减小,主要是因为具有任务优先级低的AGV 可选的避让区域有限,导致AGV 间的冲突仍旧存在。
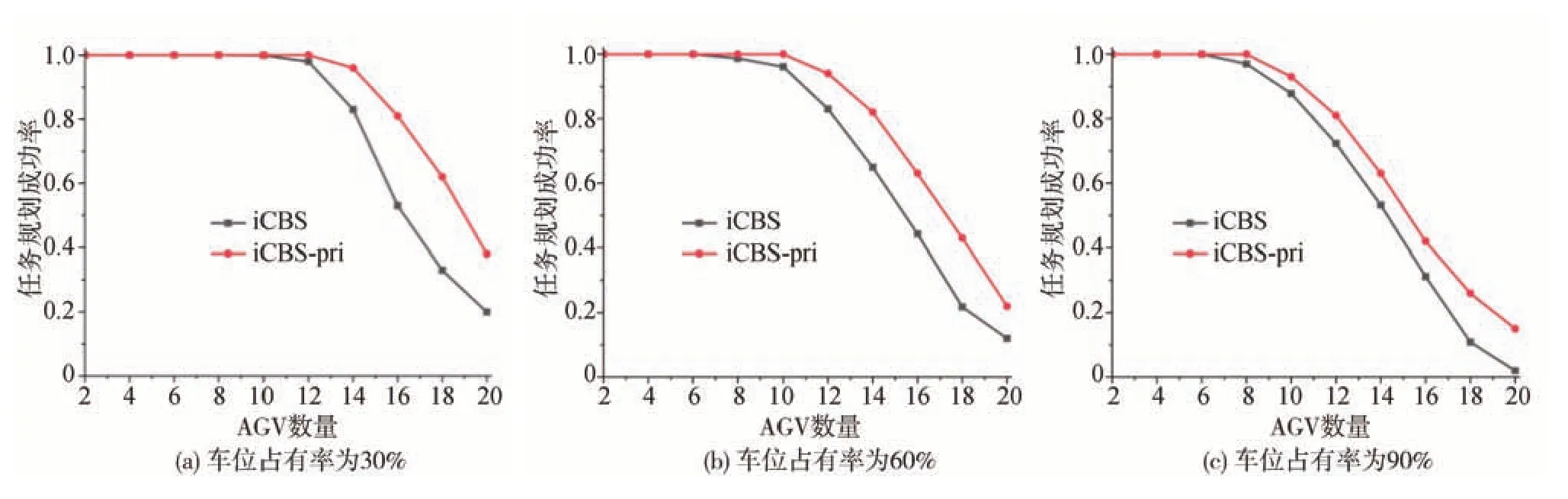
图8 优先级对iCBS算法的影响
不同路径规划算法的运行时间如表3 所示。由数据可以看出,AGV 数量的不断递增,各算法求解运行需要更多的时间。由于BP 策略与停车位占有率无关,CBS 算法和 CBS+BP 算法的运行时间几乎没有变化。BP策略在AGV数量较小的情况下,由于BP 需要搜索路径,会增加运行时间,但是在AGV 数量较多时,路径搜索的时间相较于无效搜索和提前搜索终止带来的优势来说相对较小。相较于CBS算法,CBS+BP 算法在AGV 数量较多时的运行时间有较大提升。在停车位占有率较少的情况下,SZ 策略可以大幅消解路径冲突,其搜索范围较小,所以搜索时间花费较小,因此CBS+SZ 算法在AGV 数量较少时运行时间略大于CBS 算法,而在AGV 数量较多时CBS+SZ 算法的优势较为明显。然而,任务优先级能够减少无效搜索过程,能够减少节点拓展,iCBS-pri算法的运行时间相较于iCBS 有一定的减少。在停车位占有率较高时,SZ 策略成功率逐渐降低,且运行时间略有增加,CBS+BP 算法在运行时间方面比iCBS 算法有一定的优势,结合图7 展示的任务规划成功率,CBS+BP 算法更适用于停车占有率较高的场景。
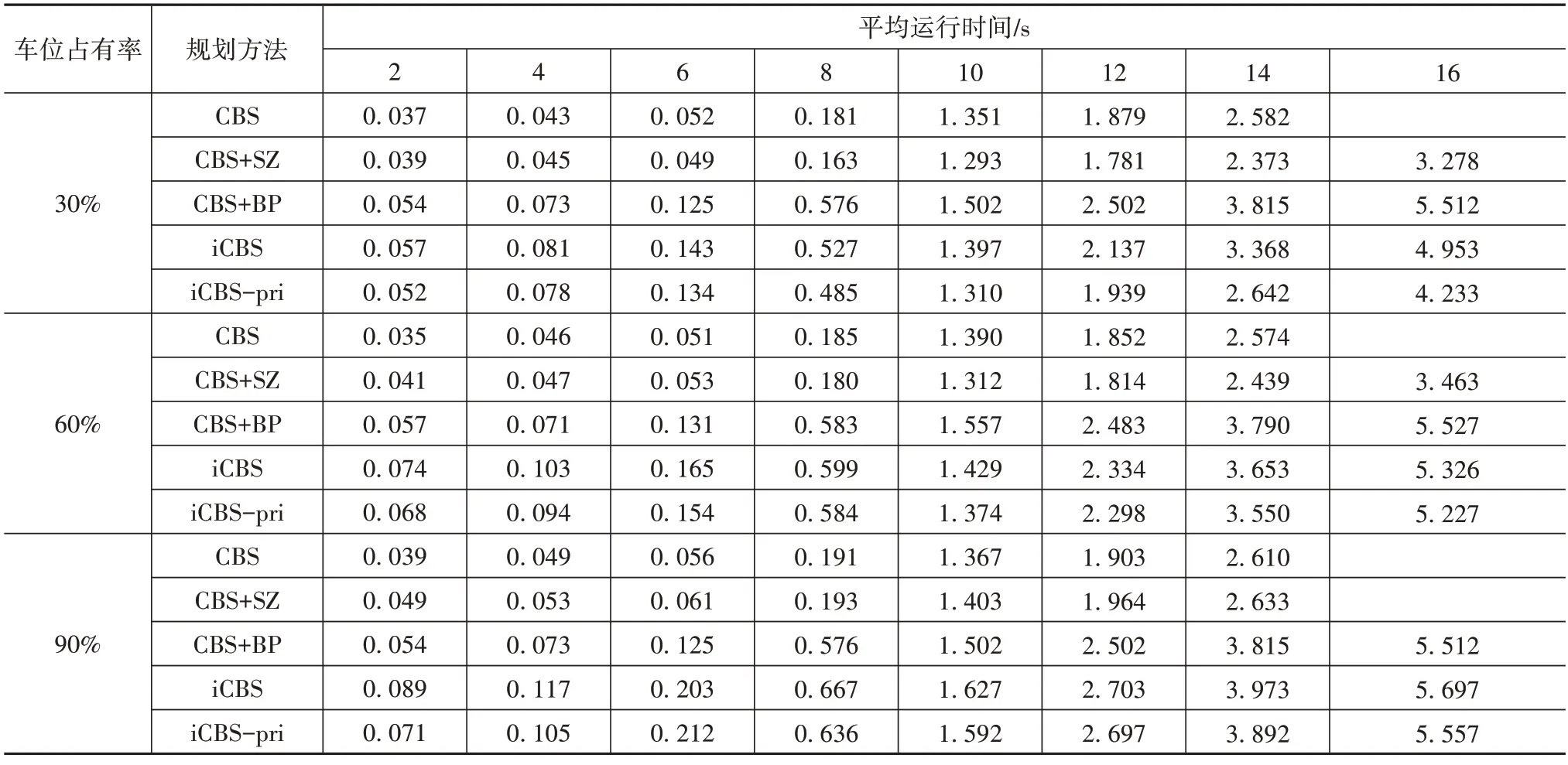
表3 不同路径规划方法的平均运行时间
4 结论
针对RIG 中具有任务执行优先级的多AGV 路径规划问题,提出了一种改进的基于搜索的冲突消解模型。根据RIG 中AGV 运行特点,创新性地提出备用区域搜索策略和旁路规划策略相结合的CBS上层搜索算法,同时在下层搜索算法中添加直线惩罚函数,以减少路径拐点对AGV 运行的影响,并在CBS算法基础上提出基于iCBS-pri的多AGV路径规划算法,并验证了iCBS-pri 算法在不同车位占有率的情况下具有较高的任务规划成功率,且iCBS-pri算法在任务规划成功率方面比iCBS 算法平均提升11.3%,算法平均运行时间提升5.93%,进一步提升了RIG 存取车效率。但研究以数值仿真验证为主,仿真实验场景设置相对理想,未来将通过获取实际的停车AGV 的运行数据以及智能车库的运行数据,设计更加贴近实际车库环境的实验场景来验证和改进iCBS-pri算法以适用智能车库运行场景。