热工水力分析程序中的液位追踪模型对比与研究
2023-11-08张恩昊丁书华
杨 军,张恩昊,姚 垚,陈 伟,丁书华
(1.华中科技大学 能源与动力工程学院,湖北 武汉 430074;2.中国核动力研究设计院核反应堆系统设计技术重点实验室,四川 成都 610213)
混合液位,又称两相液位或液位膨胀,指的是两相流中由于气相的存在而对液面的抬升现象,如图1 所示。反应堆堆芯中存在气液两相时,混合液位(而不是坍塌液位)决定了燃料元件是否裸露。蒸汽发生器中的混合液位则会对传热效率产生较大影响。因此在对反应堆进行系统分析时,对于堆芯、蒸汽发生器等部件需要较准确地追踪其中的混合液位。
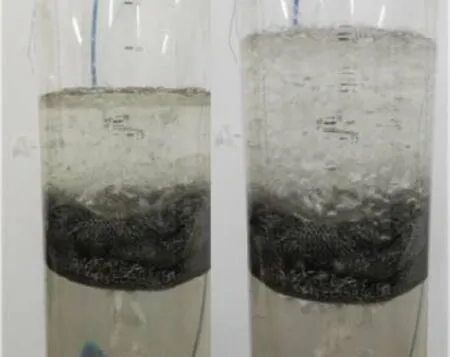
图1 混合液位(液位膨胀)现象示意图Fig.1 The mixture level phenomenon
在实际工况中,坍塌液位一般可由差压计测量。而混合液位则不易直接测量,后来发展了电容探针式、超声波式或导波雷达(Guided Wave Radar)等方法来测量混合液位。
在系统程序数值模拟中,一般使用两相流模型对流动过程进行计算。不考虑液位存在时,各单元(Cell)内流体状态初始假设为均相,使用平均空泡份额来代表单元内流体状态。但液位存在时(包括混合液位与单相液位),这种计算方法无法确定液位的具体位置,还可能会错误估计液位附近的质量对流(Mass convection),产生较大的误差。
假设有一根竖直管道(见图2),数值模拟中将其分成几个网格单元,从下方通入流体向上流动。在实际情况下,只有当实际液位到达某单元顶端时,液体才会进入上方紧邻单元;但在仅用两相流场方程模型计算的情况下,程序使用平均空泡份额来代表整个单元内的流体状态,这可能导致液位所在单元内的液体更早通过单元边界。在网格划分不够精细时,这种误差对于某些部件的模拟会产生较大影响,例如对堆芯的模拟中会导致堆芯裸露时间误判。为了消除或减小这种误差,在数值模拟中可加入液位追踪模型,使程序对混合液位的存在和移动进行追踪,修正出现混合液位的单元内流体状态参数,使计算结果更准确。
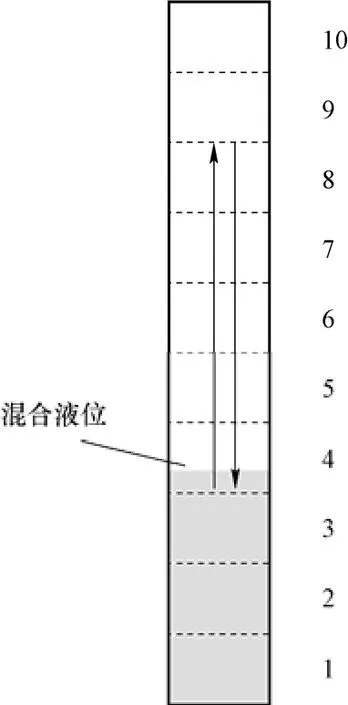
图2 竖直管道中的混合液位示意图Fig.2 The vertical pipe with the mixture level
一个基本的原则是,如果模型的某个网格单元中混合液位的预测对于系统行为的模拟较为重要,则应该在该单元中启用液位追踪模型[2]。反应堆模拟中建议启用液位追踪模型的位置包括:堆芯(堆芯裸露);蒸汽发生器(传热效率);沸水堆下腔室(蒸汽排放);下降段下部(LOCA瞬态中再循环泵吸入口的裸露)等。由于启用液位追踪模型会增加程序计算量,延长计算时间,因此在混合液位对结果影响不大的地方一般不建议启用液位追踪模型。
另外,液位追踪模型对计算精度的提高理论上也可以替代性地通过在相关部件处划分更精细的节点来实现。但要达到同样的精度,使用更精细的节点划分所增加的计算量要远大于启用液位追踪模型所需的计算量。因此,在实际数值建模时,液位追踪模型是一种实用的选择。
1 混合液位追踪模型
在目前的热工水力程序中,大多使用漂移流或两流体模型来对两相流动过程进行计算,程序中液位追踪模型的求解原理类似。本节对现有主流热工水力程序中的液位追踪模型(见表1)做了简单总结。
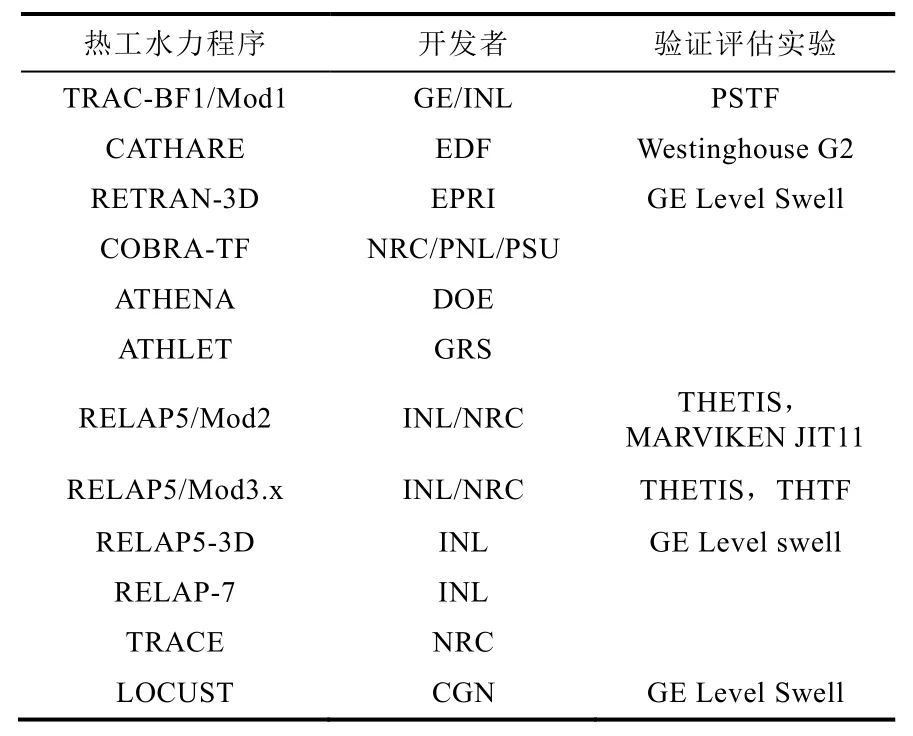
表1 热工水力程序中的液位追踪模型Table 1 Level tracking models in thermal hydraulic
1.1 TRAC
在早期的TRAC-B(TRAC-BDl)程序中,假设在每个单元内空泡份额均匀分布。这会导致在某些情况下(特别是竖直方向上)对场方程求解时错误高估单元格之间的质量对流。为了解决这一问题,TRAC 程序中加入了一个由GE 开发,INL 修改的液位追踪模型,这也是热工水力程序中较早使用的液位追踪模型。模型通过对半隐式两相流模型进行修正,加入了对单元内是否存在液位的判断、液位跨过单元边界移动等计算,使程序能够对混合液位的存在和移动进行模拟[1,2]。
为了验证液位追踪模型的正确性,Findlay等对液位膨胀试验PTSF 5801-15 和BWR/6 进行了模拟[3]。从模拟结果可以看出,液位追踪模型的使用显著提高了TRAC 对液位变化的预测能力,改进了预测结果。
1.2 RELAP5/Mod2
RELAP5/Mod2 中的液位追踪模型基本上沿用了TRAC-BF1/Mod1 中的对应模型,而对于液位跨过边界移动的修正则由RELAP5 自行设定。
Croxford 等为验证RELAP5/Mod2 模拟此类现象的能力,基于AEEW THETIS 实验进行了计算和验证[4]。结果显示在40 bar、20 bar 压力条件下,混合液位预测比较准确,但在10 bar以下,RELAP5 对空泡份额预测值偏高。在混合液位下方,RELAP5/Mod2 对空泡份额预测偏高,这可能是由于相间阻力计算的局限。而Rosdahl 等对于Marviken JIT 11 的模拟表明,RELAP5/Mod2 可以较准确地预测单元中空泡份额的变化,对于大尺寸容器的液位膨胀情况,相间阻力模型允许相间阻力随空泡份额的增加而减小[5]。
1.3 RELAP5/Mod3.x
RELAP5/Mod3.3 中包含的液位追踪模型同样沿用自TRAC-BF1/Mod1 程序。程序中监测混合液位的原理基于沸水堆相关实验数据[6]及数值实验[7]。
Kim等将RELAP5/Mod3.2 程序中的液位追踪模型与一个降压过程实验值进行了比对。实验数据来自一个高2.4 m、内径0.3 m 的高压试验容器上进行的一系列试验[8]。对比结果显示,如果采取适当的节点和时间步长,RELAP5/Mod3.2 的结果与目前试验数据在相对缓慢的降压过程中吻合较好。然而,在相对快速的减压过程中,由于对液体夹带的预测偏低,RELAP5/Mod3.2 所预测的轴向空泡份额分布与实验结果存在一定差异。
1.4 RELAP5-3D
INL开发的RELAP5-3D 中的液位追踪模型沿用了RELAP5/Mod3.x 中的模型。利用液位追踪模型和RELAP5-3D 控制变量计算混合液位的位置。
Aumiller 等基于GE Level swell 1004-3 实验对RELAP5-3D 程序进行了评估[9]。结果显示,使用液位追踪模型后,模拟结果与实验值吻合更好。总的来说,RELAP5-3D 在瞬态喷放分析中表现良好,其液位追踪模型得到了较好的验证。
1.5 TRACE
美国核管理委员会(NRC)所主导开发的TRACE 程序采用了六方程的两流体模型[10]。在TRACE 中,混合液位可以通过在控制系统中设置可变的“Two Phase Level”进行监测和模拟,并把需要监测的部件单元归并到一个“堆栈”(Stack)中,程序会在设置的所有单元之间自动寻找混合液位。与RELAP5 相比,不需要再对每个单元的混合液位分别设置指令进行监测,提高了建模效率。
Chanyi Song 等使用TRACE 对GE Level Swell 1004-3 实验进行了评估计算,结果显示,TRACE 对实验过程中不同时间的空泡份额和混合水位预测与实验值符合较好[11]。
1.6 CATHARE
CATHARE 是法国电力公司(EDF)开发的,用于压水堆失水事故最佳估算的热工水力分析程序。CATHARE 对流动现象的计算基于两流体模型。该程序对混合液位的预测主要由对空泡份额的模拟来进行。
为验证程序的性能,Barre 等使用CATHARE 对西屋G2 实验进行了评估[12]。结果表明在实验压力范围(0.1~5.51 MPa)内,程序对混合液位和空泡份额分布的预测值与实验值吻合得较好。此外,蒸汽发生器中混合液位与空泡份额的计算也与实验结果相符。
1.7 RETRAN-3D
RETRAN 程序主要用于轻水反应堆的安审和最佳估算。该程序从1975 年开发的RETRAN-01开始发展,最新的版本为RETRAN-3D。
RETRAN-3D 中的混合液位定义了气泡中蒸汽和混合区域的上升体积的大小。它是体积底部与混合液面之间的高度或垂直距离。混合液位的瞬态行为取决于汽液流入和流出的体积和气泡上升速度值。
RETRAN-3D 对混合液位只能进行粗略评估。为解决这一缺陷,Aounallah 等对GE level swell 实验进行了模拟,确定了预测混合液位时较为敏感的相关参数[13]。而后对沸水堆蒸汽管线断裂事故进行了模拟,结果显示,RETRAN可以粗略预测混合液位,但离精确预测仍有一定差距。
1.8 LOCUST
LOCUST 是由中国广核集团有限公司(CGN)所开发的用于“华龙一号”等三代堆LOCA 类事故分析的热工水力系统分析程序。卢霞等基于GE LEVEL SWELL 实验结果,对LOCUST 软件中临界流模型和液位追踪模型进行了验证与评估[14]。分析了压力容器压力、混合液位、空泡份额分布等参数,结果表明:实验的空泡份额分布除在喷放过程中某些时刻与实验值存在一定偏差外,整体上与实验值符合得较好。
2 混合液位相关实验
为验证程序中液位追踪模型的准确度,与现有实验数据进行对比验证十分必要。本节对一些与混合液位相关的典型热工水力实验(见表2)做了介绍。

表2 混合液位相关实验Table 2 Level swell related experiments
2.1 GE level swell
GE level swell 实验是由通用电气(GE)进行的一系列实验,目的是研究在喷放条件下的临界流动、混合液位和轴向空泡份额分布等现象[9,11,13,14]。这些实验常被用来验证安全分析程序对某些分离效应现象的预测能力。实验通过从喷放管线及喷放孔释放出压力容器内气体和液体来实现系统的喷放过程,实验过程中测量了压力容器的系统压力、混合液位及空泡份额分布等参数。
实验中设置了两种尺寸不同的压力容器,分别通过文丘里管和喷放孔来对喷放流量进行控制。大尺寸和小尺寸喷放的实验步骤相似,首先在压力容器内装满水,在大气压下加热沸腾近30 min 来释放溶解在水中的气体,然后关闭压力容器顶部阀门,加热水至初始状态(385 ℃、6.9 MPa),而后喷放阀门打开,流体通过喷放孔排放出去,喷放瞬态开始。
2.2 THTF
THTF(Thermal-Hydraulic Test Facility,热工水力测试台架)是橡树岭国家实验室(ORNL)在美国核管理委员会的支持下,对高压低热流条件下棒束的传热进行的实验研究[15]。THTF通过设置环形电加热束来达到小破口失水事故的相似状态,使用电加热棒模拟17×17 压水堆(PWR)燃料组件。
实验工作主要集中在以下四个方面:
(1)准稳态无覆盖管束传热;
(2)高压低热流条件下的混合液位;
(3)高压堆芯再淹没;
(4)高压瞬态管束沸腾。混合液位实验结果表明,气泡的存在引起的混合液面与堆芯蒸汽生成率呈线性相关。
2.3 Marviken
Marviken 实验T-ll 是在瑞典Marviken 电厂进行的喷射冲击试验(JIT)项目中的几个大尺寸容器减压试验之一[16]。实验设备由一个直径5.2 m,高22 m,总容积420 m3的大容器组成。容器中插入了一个直径1 m、高18 m 的竖管。在容器底部的竖管下端装有阀门、喷嘴和安全盘的排放管。
在JIT 项目中,大部分实验都用于研究过冷和饱和两相喷放。T-ll 在该系列中十分特殊,因为在该实验中只排放蒸汽。T-ll 试验的装置几何形状、物理尺寸和仪器仪表为确定混合液位和进行仪器响应分析提供了较好的数据来源。
2.4 THETIS
THETIS 实验由UKAEA-Winfrith 实施,装置由一束放置在垂直压力容器中且被圆形护罩包裹的垂直电加热棒组成[4]。实验中水由容器底部注入,并且系统压力可以维持设定值。实验分别在40、20、10、5、2 bar 的压力条件下进行。
每根棒由中心螺旋缠绕的镍铬合金加热元件组成,该加热元件被氧化镁(MgO)绝缘材料包围,并封闭在两个同轴不锈钢套内。十二个直径为1 mm 的热电偶位于每个加热棒的内外护套之间来测量温度。通过测量管束内不同位置的压力,可以得到管束中空泡份额的轴向分布。
2.5 G2
西屋公司的G2 实验使用了289(17×17)根压水堆全高燃料棒束[12]。实验中对堆芯裸露部分的热流数据进行测量,通过与现有的堆芯加热中的传热关系式进行比较,尝试推导出适用于小破口失水事故的传热模型。
实验中从蒸汽储存器或气液分离器向容器中充入饱和水到指定的液位,然后接通电源,开始数据采集。当容器中的水开始沸腾并形成混合液位后,燃料棒从上到下慢慢裸露出来。裸露开始后,燃料棒的温度开始上升,当温度达到最高允许温度 860 ℃,或混合液位低于1.75 m 后,电源关闭。电源关闭后数据仍会继续采集30 s。
3 液位追踪算法
虽然不同热工水力程序之间,在单元中存在混合液位时对场方程的修改有所区别,但它们对混合液位位置及移动速度的计算方法是类似的。
以RELAP5 等程序为例,正常情况下混合液位的存在如图3 所示,当相邻的三个单元(j-1、j、j+1)之间空泡份额满足如下关系时,程序确定单元j内存在混合液位:

图3 存在混合液位的控制体单元[1]Fig.3 The control volume unit with mixed liquid level
式中:αj——单元j的空泡份额;
αj+1——单元j+1 的空泡份额;
αj-1——单元j-1 的空泡份额;
Δαcut——正常混合液位存在时的最小变化,默认值为0.2;
αlev——正常混合液位上方的单元中允许的最小空泡份额,默认值为0.7。
式(1)、式(2)分别适用于混合液位在单元j上半部分和下半部分两类情况。
当确定单元中存在空泡份额后,在无液滴夹带时,假设液位上方及下方的空泡份额为:
当单元内流动面积恒定时,单元内混合液位的位置为:
式中:Lj——单元j内混合液位的位置;
Δxj——单元j的长度。
对式(4)求导数,则可以得到混合液位的移动速度:
通过确定混合液位的位置和移动速度,可以确定单元中混合液位上下两侧所占的体积及混合液位通过单元边界的时间,并对场方程进行相应的修正,如对动量方程中的相密度、压力梯度和动量通量项进行修改。通过这些修改可以弥补有限差分格式对混合液位附近单元质量对流的计算误差。在相同的精度要求下,开启液位追踪模型也可以接受更粗略的节点划分,降低了计算量。
4 数值验证分析
为初步评估现有的RELAP5 和TRACE 程序在混合液位存在时模拟结果的合理性,参考mini-FCVS 台架(见图4)在RELAP5 和TRACE程序中进行了建模(见图5),并对模拟结果进行分析。
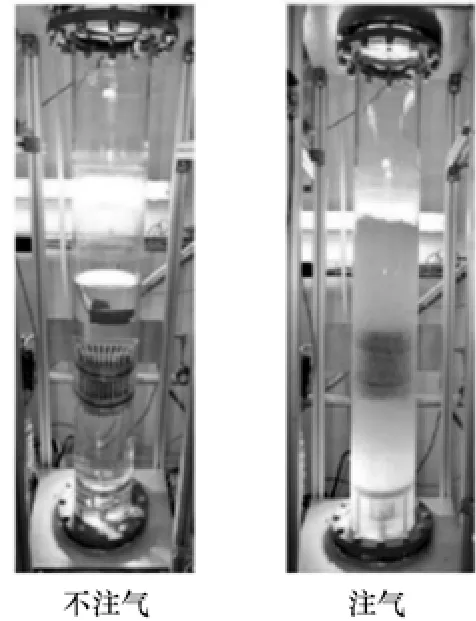
图4 mini-FCVS 实验台架[17]Fig.4 The mini-FCVS test rig
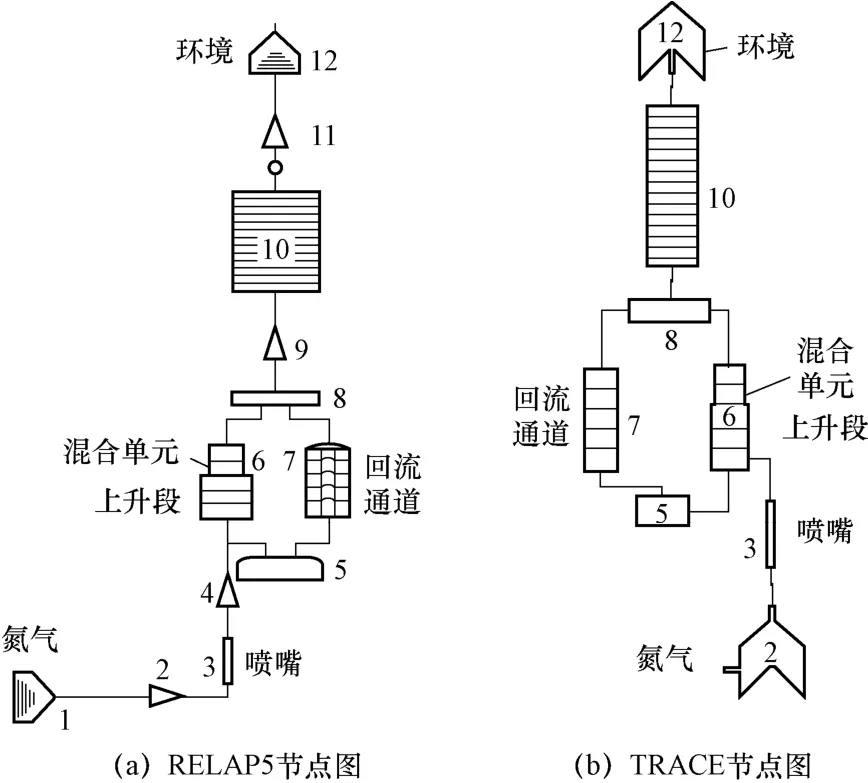
图5 mini-FCVS 的模型节点图Fig.5 Nodalization of mini-FCVS model
mini-FCVS 台架[17]被Ignazio Beghi 等人用于研究安全壳过滤排放系统中湿式洗涤器对气态碘元素的洗涤效率。台架主体为高1.5 m、内径0.2 m 的玻璃容器,下部连接一个氮气源,在实验中氮气通过喷嘴进入玻璃容器内部内径为0.15 m、高0.5 m 的导流筒,导流筒上方安装了0.3 m 厚的混合单元,用于使氮气与过冷水混合均匀。实验中通入不同流速的氮气,来观察容器中流体的状态。实验中通过玻璃容器的透明管壁可对两相流体的液位和气泡的大小进行测量。
虽然现有的液位追踪模型主要适用于汽水混合物的计算,与该实验条件(氮气 -水)并不完全吻合,但模拟计算所得的结果也可以为分析液位追踪模型在两相流计算中所产生的作用提供帮助。
在使用程序模拟时,通过调整注入氮气的压力并对接管的流速进行限制,来使模型中氮气的流速与实验条件相同。随着表观气速的增加,容器中的液位也逐渐增高。图6 展示了在RELAP5 模拟结果中部分气速下系统中各单元空泡份额的直观分布。随着表观气速的增加,混合单元及上部液体空间中的空泡份额升高,混合液位上涨。
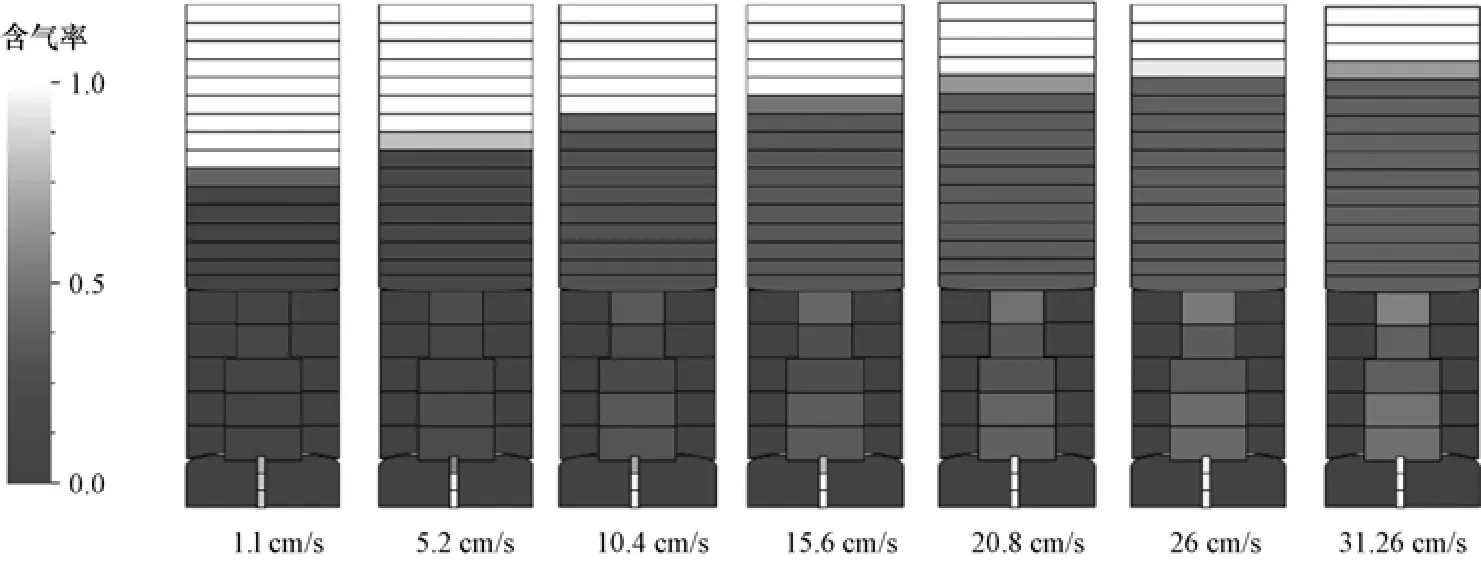
图6 部分表观气速下含气率分布图(RELAP5 结果)Fig.6 Distribution of gas content under partial apparent gas velocity (by RELAP5)
在表观气速为10.4 cm/s 时,RELAP5 模拟结果中液位发生变化的几个单元的空泡份额变化过程如图7 所示。在气体开始注入后,容器中液位开始上升。由于最初氮气还没有到达液面处,液面以下的单元内没有气体,所以随着液位上升,单元内空泡份额会到达0。在氮气开始浮出液面后,液面以下的空泡份额稳定在0.3 左右。在液位上升过程中,存在混合液位的单元都是在空泡份额到达最低点后,液位才会进入下一个单元。
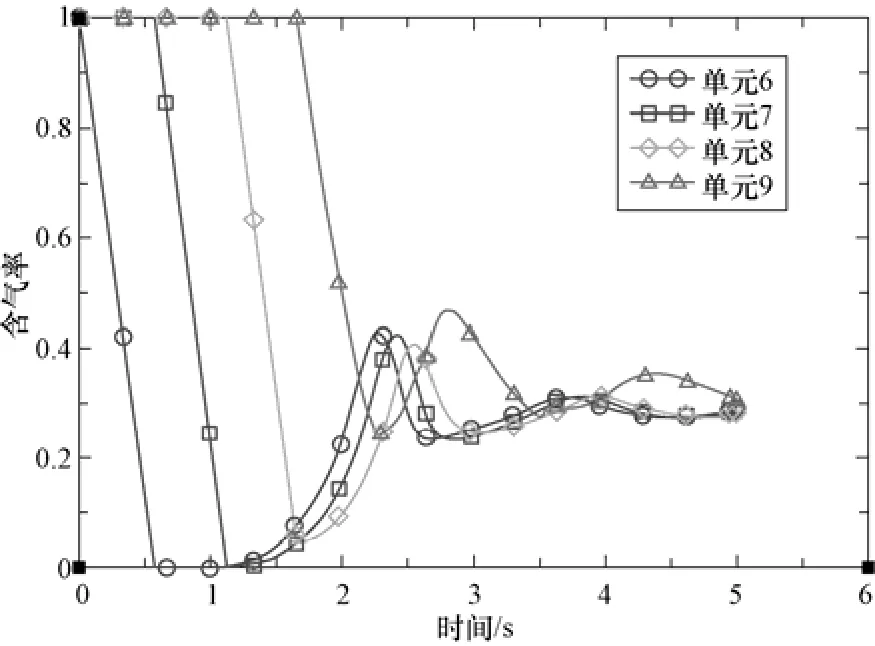
图7 箱体中单元6~9 空泡份额变化Fig.7 The void fraction of Cell 6~9 in the tank
图8 中分别为RELAP5 程序液位追踪模型开启与关闭状态下,发生液位变化的单元内空泡份额的变化。可以看出,关闭液位追踪模型后,存在混合液位的单元内的液体会更早地进入下一个单元,并且液位进入下一个单元后,之前的单元内仍会有小部分气体残留。由图9也可以发现,在开启液位追踪模型后,液位通过单元边界时,质量流量的变化是在瞬时完成的,这说明混合液位在准确的时间直接跨过了单元边界;而无液位追踪时,液位通过单元边界的时间被拉长到了一段时间内,这可能会导致一定的计算误差。
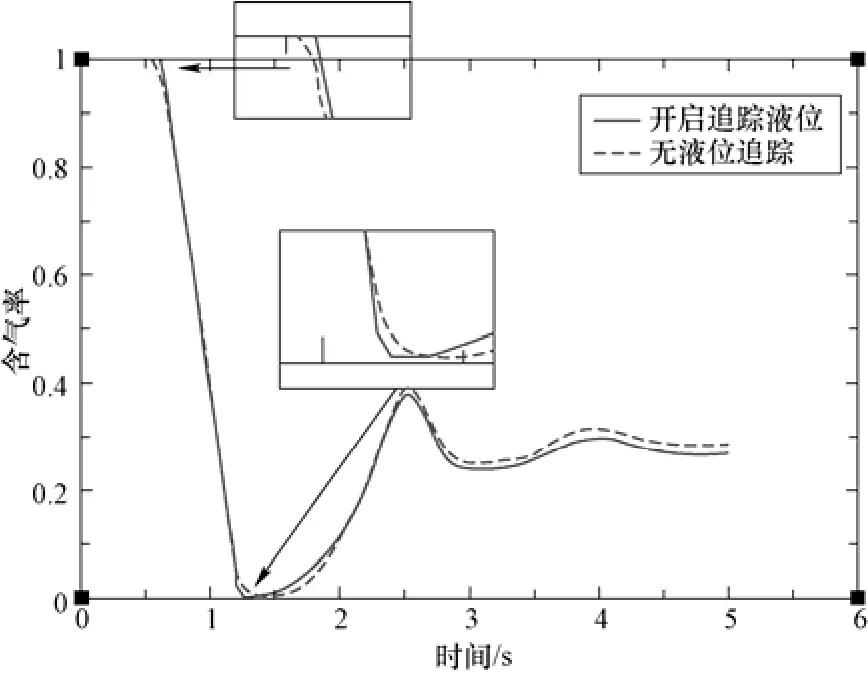
图8 箱体中单元7 空泡份额变化Fig.8 The void fraction of cell 7 in the tank

图9 箱体内单元6~7 之间的质量流量Fig.9 The mass flow rate between cell 6 and 7 in the tank
RELAP5 和TRACE 的模拟结果对比如图10所示。RELAP5 程序的模拟结果呈现出了与实际值类似的变化趋势,但其数值与实际值存在一点偏差。可能的原因包括:RELAP5 中的液位追踪模型一般更适用于反应堆中的高压状态,在低压的条件下可能会导致一定的误差;RELAP5 中的液位追踪模型主要适用于水与水蒸气组成的液位变化过程,对不凝气体导致的液位变化过程预测可能存在局限;RELAP5 模型中回流单元和混合单元的设置无法达到原实验装置的设计效果,导致结果出现偏差。
TRACE 程序在气速较低时模拟值与实验值吻合较好,在表观气速高于7 cm/s 后偏差略有增加。原因之一可能是在该流速下,流动开始向湍流转变,因此计算误差有所增大。总体上,两种程序对于混合液位的追踪实现了与实验值较好的吻合。
5 结论
本文对目前主流的热工水力分析程序中液位追踪模型的设计原理进行了调研总结,并梳理了用于验证评估的相关实验结果。大部分程序对液位追踪模型采取了与早期TRACE 程序类似的监测与计算逻辑。根据单元内的空泡份额确定对混合液位的位置和移动速度,然后对场方程模型进行修正。数值验证评估结果表明,多数程序在其指定适用范围内的预测值与实验值吻合较好。与液位追踪模型类似,在反应堆热工水力瞬态中存在众多的类似物理过程或现象(例如临界流、分层夹带、再淹没等),在系统分析软件的开发中均需要进行有针对性的模型开发与验证。本文的研究可为我国自主化分析程序中相关模型的开发提供借鉴与启发。
