基于非线性磁力的压电式旋转能量采集器*
2023-11-08杨春来
孙 航,王 海*,史 宁,杨春来,唐 冶
(1.安徽工程大学机械工程学院,安徽 芜湖 241000;2.先进数控和伺服驱动安徽省重点实验室,安徽 芜湖 241000;3.天津大学机械工程学院,天津 300350)
在工业生产中,旋转机械能广泛存在于机械结构中,像齿轮箱、轴、轴承、工作台等[1]。 有些设备本身较为精密不便拆装,有些设备安装在环境恶劣不便长期人工检测的环境[2],对其实时运行状态进行检测显得越来越重要。 随着物联网技术的不断发展,在生产生活中大量应用各种类型的无线传感器网络(WSN)[3]。 传统的无线传感器网络节点一般采用电池供电方式,存在供电时间有限,更换和维护难等问题[4]。 而从环境中采集能量供给网络节点不失为一种有效的解决方案[5]。 此时将旋转能量采集系统及无线传感器集成在设备中,便能方便维护人员时刻监测设备运行状况,从而对故障进行预警。 这样便可避免浪费人力和繁重的工作。 将旋转能量转化为振动能量是一种高效、清洁的能量收集方式。 根据工作原理,振动式能量采集器主要分为三种主要类型:静电式、电磁式和压电式[6]。 其中压电式能量采集器具有较高的机电耦合效应和能量密度、便于与MEMS 集成等优点,非常适用于WSN供能。 因此压电式旋转能量采集器正受到国内外学者的广泛关注。
近年来随着研究的不断深入,非线性力作为提高能量采集效率的重要手段也被应用于旋转能量采集。Zhang 等[7]提出了一种用于收集人体运动过程中的低频振动能的旋转式电磁能量采集器,通过扭转驱动结构和棘轮离合器结构构成的惯性系统实现将垂直方向的直线运动转换为高速转动。 Beato-Lopez 等[8]提出了一种与巨型磁阻(GMI)传感器结合的能量采集器。 该能量采集器由在圆柱框架两端的两个固定的永久磁铁组成,一个用作惯性质量的悬浮磁铁和一个采集感应电动势的线圈。 基于GMI 效应,在外部激励作用下磁性元件的交替运动产生交变磁场,进而引起系统输出阻抗的变化。 Fan 等[9]提出了一种用于风能收集的混合式能量采集器。 该能量采集器包括旋转体和滑动体,其中旋转体构成电磁式发电机(EMG),滑动体构成摩擦电纳米发电机(TENG)。 当外部风速不小于4 m/s 时,该能量采集器可以将风能转化为电能。 Stanton 等[10]设计了一种双向滞后的非线性压电式能量采集器,通过调节非线性磁力的相互作用来调节末端固定永磁体质量块的压电悬臂梁在磁势场内发生硬化和软化,不仅增加了压电能量采集器的输出带宽,并且其性能优于线性谐振。 Pillatsch等[11]提出了一种惯性旋转式压电能量采集器,采用磁耦合与旋转质量块抽离压电梁的结构形式,该能量采集器具有较宽的工作频率范围,且可以采集不同方向的振动能量。 Wu 等[12]在汽车的刹车钳上固定一个不转动的磁铁,而在汽车轮胎内部安装压电悬臂梁,使两端装有磁铁,犹如跷跷板似的冲击棒受到向心力以及受到刹车钳上磁铁的作用力,使两端分别撞击压电片使其振动并产生电压。 Nezami 等[13]提出一种圆盘摆动驱动的压电能量采集器。 该能量采集器由小磁盘和一对磁体组成,可以将缓慢的机械旋转转换为振动,所采集的能量可用于涡轮机叶片的自持式传感和监控。 Zhou 等[14]提出了一种磁耦合非线性压电能量采集器,通过改变外磁铁的角度方向来增强宽频响应。 Ramezanpour 等[15]提出了一种旋转式压电能量采集器。 该能量采集器包括一个自由端固定磁铁的旋转摆和八个双压电悬臂梁,当旋转角速度越大时输出功率越大。 以上学者提出了不同的结构,通过不同的方式将旋转能量转化为电能,或将其他能量转化为旋转能再转为电能。 磁性力作为引入非线性力的重要方式受到广泛关注,然而对于磁铁数量对系统激励的影响研究较少。 同时大部分旋转式能量采集器转轴与悬臂梁垂直,对于转轴与悬臂梁平行情况研究较少,为了提高该情况下的能量采集效率,提出该基于非线性磁性力的压电式旋转能量采集器。
1 工作原理
在传统能量采集器的基础上将悬臂梁自由端固定的质量块替换为磁性质量块。 将具有旋转能量的机构假设为电机驱动的转轴,磁铁通过基底或夹具固定在转轴上,磁铁均匀固定在转轴四周。 以一对磁铁为例说明其工作原理,如图1 所示系统原理图及图2 所示,首先将磁铁A固定在压电悬臂梁自由端处,磁铁B固定定在转轴处,压电悬臂梁固定在基座上。 假设A,B两磁铁是完全相同的磁铁,磁感应强度均为M,体积均为V,其中A磁铁的磁力矩沿Z轴正方向,B磁铁的磁力矩沿Z轴负方向,两磁铁间产生吸引力。 当转轴旋转时,由于磁铁间相互作用,会对悬臂梁自由端产生周期性激励,从而使悬臂梁受激振动,进而通过压电片将旋转能转化为电能。当旋转磁铁和自由端磁铁之间的间距一定时,压电悬臂梁在旋转磁铁的作用下,悬臂梁会产生大变形振动位移现象,当振动位移达到悬臂梁厚度两倍以上时,被迫振动下的压电悬臂梁会产生显著的非线性现象[16]。 从而提高能量采集效率。

图1 非线性磁力原理图
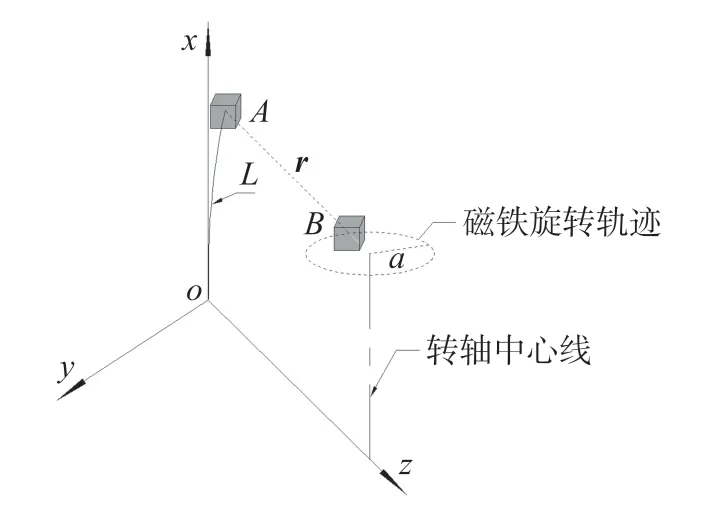
图2 非线性磁力对坐标系
2 理论模型
2.1 非线性磁力方程
由于非线性磁力在本能量采集系统中起激励的作用,是提高能量采集效率的关键因素,所以首先推导非线性磁力的表达式。 图2 所示为非线性磁力对的坐标系,其中压电悬臂梁振子的长度为L,旋转系统的旋转半径为a,x轴方向的高度为L,转角为θ,假设A、B两磁铁是完全相同的磁铁,磁感应强度均为M,体积均为V,两个磁偶极子之间的磁势能如式(1)所示:
式中:μ0为真空磁导率;r为A磁铁中心到B磁铁中心的向量;MA、MB为A、B磁铁的磁矩极矩;MA=MmV×Mm,Mm为磁化强度向量,V为磁铁的体积。建立如图2 所示以压电悬臂梁振子自由端为原点的坐标系。 将A,B磁体的位置向量代入式(1)得两个磁偶极子之间的磁势能,如式(2)所示:
磁铁的参数如表1 所示。

表1 磁铁参数
因为周期性脉冲波可以表示为无限多个系数相同的余弦叠加而成,为了简化公式便于数值处理在i=1 时进行变数代换,令g=ωdt,则式(3)可以写成:
利用MATLAB 对式(4)进行数值处理,得:
将g=ωdt代回式(5)并做傅里叶展开,设使系统达到共振的转速为10 rpm,得到系统在达到k阶共振时对应的转速及产生的激励磁力如图3 所示。
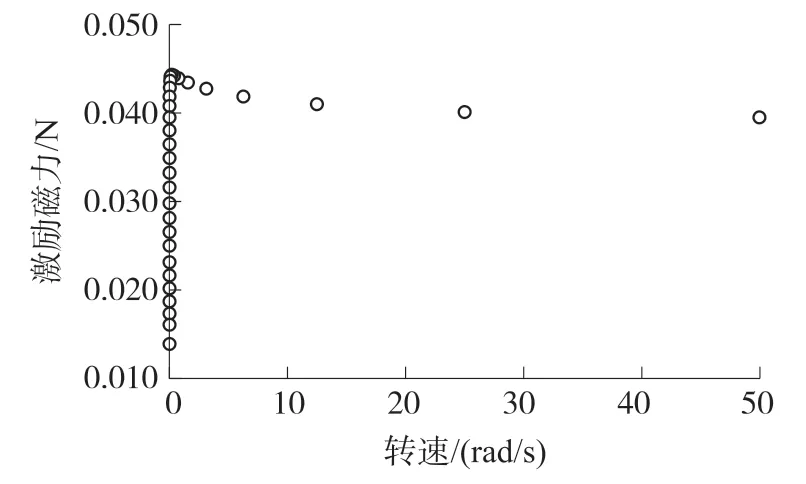
图3 不同阶数对应转速与非线性磁激振力
可以看出在k=9 时磁力达到峰值,之后开始明显下降,当k>15 时磁力开始低于k=1 时。 相较于垂直简谐振动时振子仅有一阶共振频率,用该方法可以使压电振子在转速为共振频率对应转速的整数倍时激励压电振子在第一模态下发生共振,且这些共振都与k=1 时功率输出值相当。 当使用多个磁铁时,转动盘仅需要单个磁铁使系统达到共振的转速的几分之一的转速便可使系统达到共振或高阶共振。
2.2 非线性动力学方程
设压电悬臂梁基底和压电片的尺寸分别为ls、bs、hs、lp、bp、hp,磁铁的质量为MA,u(x,t)和v(x,t)分别为某时刻梁上任一点在横向位移和纵向位移。 设AB为复合梁上的单元段,A1B1为受力后产生形变后的单元段,u为复合梁上的单元段受力振动后产生的水平方向的形变,v为单元段受力振动后产生的纵向形变。AB单元在受力振动产生形变的x轴方向应变和转角分别为e、θ。 由材料力学及非线性2-D Euler-Bernoulli 梁理论,几何非线性关系如式(6)所示[16]:
利用Hamilton 原理,可以得压电复合梁结构的非线性运动学方程,如式(7)所示:
式中:δ为对广义坐标的变分符号,T为压电悬臂梁的动能,U为压电悬臂梁的势能,W为压电悬臂梁的非保守力做功[16]。
从能量的角度分析,当转轴旋转时,旋转轴上的磁铁与压电复合梁自由端的磁铁产生作用力,使悬臂梁发生弯曲变形,所以基底梁及此时附在悬臂梁上的压电片具有动能[17],悬臂梁自由端的磁铁也具有动能。 当压电悬臂梁受到外力弯曲时,也会储存弹性势能,由欧拉-伯努力梁理论可以得到悬臂梁的弹性势能。 同时压电悬臂梁的压电层在弯曲变形时,也会产生弹性势能,由于压电片受到外部作用力使内部电荷产生定向移动从而产生电势差,在压电片的上下表面产生电势能。 假设压电悬臂梁系统在外加电阻情况下,为获得弹性体悬臂梁系统的常微分方程,利用Galerkin 方法将压电悬臂梁横向振动的振动方程分解为空间函数和时间函数的乘积。 将上述能量与位移函数代入式(7)按广义坐标进行变分,数学处理后得到系统的动力学方程如式(8)和式(9)所示:
假设压电悬臂梁在受到外部振动激励弯曲时,悬臂梁的挠度曲线一直保持在其对称面内,忽略阻尼的影响,假设梁的横截面不变,则梁在发生振动位移时的微分方程,可以如下表示:
假设悬臂梁的自由端质量集中于质量块m,取悬臂梁的固定端为坐标原点,使用Galerkin 方法处理式(11),求得振型函数如下:
由模态正交性得:c1=1。
为了进行数值仿真,对系统动力学方程进行无量纲化,为了便于分析,只考虑一阶振动模态,现引入无量纲变换:
令系统的一阶固有频率为ωn,阻尼比ξm=则动力学方程(8)和(9)可改写为:
为了研究系统在不同的激励条件和不同的结构参数下的稳态响应特性,通过谐波平衡法求解微分方程周期解近似值。 谐波平衡法是强弱非线性振动问题常用的一种近似解法,不因为压电悬臂梁在做横向振动而限制在稳定的零平衡位置。 因为系统达到稳态后参数不随时间变化,故随时间变化的参数和关于时间的导数都可化为零。 设周期激励力为Fm=fcos(Ωt)。 根据谐波平衡法得到系统的机械幅值方程:
解得系统机械幅值方程的系数b、c和d、e,分别为:
式中:
由此系统的幅频响应可化简为:
得到压电能量采集系统的电压幅值,如下式所示:
根据式(19),可以给出外接纯电阻在一个周期内消耗的平均功率为:
3 数值仿真
谐波平衡法忽略了系统更为复杂的行为,是对旋转式压电能量采集系统设计和优化的一种有效的方法。 由于解析法求解非线性系统时一般只能得到近似解,为了探索不同激励幅值和结构参数下系统的稳态周期响应特性和系统的动力学响应特性,在无量纲动力学方程和稳态周期响应解的基础上进行了数值仿真。 部分常规参数的选取参考了Erturk[18]和Stanton[19]等的工作,常规参数如表2 所示。
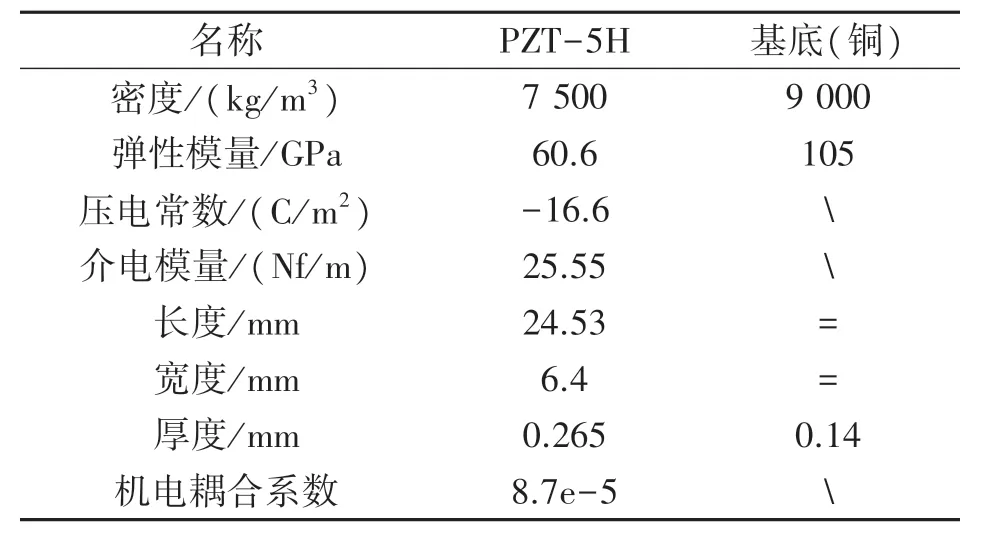
表2 常规参数
由于周期性磁性力可以表示为Fm=fcos(Ωt),所以f可以看做强迫振动的激励幅值,Ω可看做激励频率。 在f分别为0.1,0.4,0.6,0.8 时分析了系统幅值响应随频率的变化情况如图4 所示,可以看出由于外部激励幅值的增加,系统动力学近似解析解的最大值在增大,并且峰值向左偏,系统呈现软弹簧的非线性性质。 从整体来看,当f≤0.1 时,系统未呈现非线性特性,仍为线性响应。 当f>0.1,系统的主共振的幅频响应呈现多解和跳跃非线性,由于压电能量采集系统的非线性特性,使系统产生的这种现象比线性系统产生更多电能。 当f由0.1 递增到0.8 时,响应幅值由2 增大到18.6,并且非线性特性随之增强。

图4 不同激励幅值下的采集器幅频响应曲线
为了探索旋转式压电能量采集系统的动力学响应,在无量纲动力学方程的基础上,应用MATLAB对系统进行数值仿真。 研究了系统的响应情况随激励频率Ω的变化情况。 随着激励幅值f的增大,系统在f=1.2、Ω=1 的情况下产生了混沌现象,如图5所示。 在f=1.5 时,系统由混沌运动转变为大幅周期运动,如图6 所示。 此时虽然系统输出电压的幅值不再增长,但是输出电压的密度大幅提升,表明系统将更多的能量转化为电能输出,能量转换效率大幅提升。 可见当激励频率和激励幅值较小时,系统在每个周期内振动较多次,并且振幅较小,随着激励频率和激励幅值的增大,系统的振动频率和振幅随着激励频率的增大而增大,压电悬臂梁围绕平衡点开始做大幅混沌运动,且系统的振幅增大。 激励频率不变,激励幅值增大到一定值,系统则从混沌运动转变为大幅周期往复运动,当激励频率较大时,压电悬臂梁产生共振,悬臂梁自由端振幅较大,并且输出电压达到最大值。

图5 f=1.2、Ω=1.0 时的能量采集器末端位移和输出电压

图6 f=1.5、Ω=1.0 时的能量采集器末端位移和输出电压
4 实验
为了验证旋转磁铁数量与转速的关系以及该种能量采集器的能量采集性能,搭建了实验装置,如图7 所示。 通过伺服电机带动旋转平台及旋转磁铁旋转,对压电能量采集器进行性能测试。 首先在磁铁间距为2 cm 时,采用单旋转磁铁在转速10 rpm 至600 rpm 每隔10 rpm 转速记录开路电压峰值,如图8所示。 在转速为530 rpm 时,开路输出电压达到最大值43.6 V。 其次,在转速为270 rpm 和350 rpm 时,开路输出电压分别达到峰值20.4 V 和33.4 V。 此时激振力频率与压电梁相近或重合,系统发生共振,此时有三个谐振点。

图7 能量采集器性能测试实验装置图

图8 单旋转磁铁下能量采集器转速-输出电压图
在相同条件下记录了使用两个旋转磁铁时的开路电压,如图9 所示。 此时,在转速260 时开路输出电压达到了最大值42.4 V。 其次在转速180 rpm 时有峰值输出电压两23.6 V。 可见采用两个旋转磁铁时,达到最大输出电压所需的转速近似为在单个磁铁输出电压达到最大值时转速的一半。 采用多个磁铁时,低频段与悬臂梁共振的频率相近,共振峰发生了合并,导致了谐振点数量的减少。 此时有两个谐振点。 两种情况下最大输出电压有轻微差别,转速并不严格反比,这是由于实验采样间隔为10 rpm,数据精度不足,可见当采样间隔变小,数据将逐渐趋近理想值,足以证明达到最大输出电压所需的转速与采用的旋转磁铁数量成反比。 与前文的理论基本吻合。
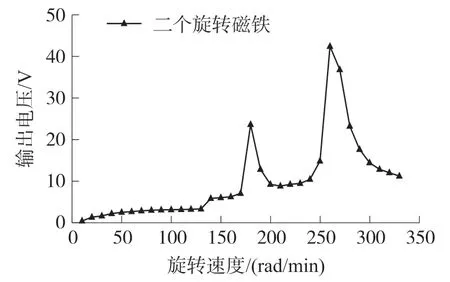
图9 两个旋转磁铁下能量采集器转速-输出电压图
无论是采用单旋转磁铁还是两个旋转磁铁,其悬臂梁共振频率转速下的输出电压峰值均相同,但是当采用多个旋转磁铁时显然激励频率更高,也使得达到共振频率所需的转速呈比例地降低。 由于峰值区域电压较为突出导致其频带看似较窄,但当该能量采集器不在共振频率转速时仍然具有较好的输出能力,输出电压基本能保持在5 V 以上。
综上,当环境转速较低时,我们可以通过使用多组磁铁来降低系统的共振转速使系统大低转速下达到共振从而提高系统的能量采集效率。 当环境的转速较高时,我们可以降低磁铁的数量,使系统拥有更大的带宽,同样能够提高能量采集效率。
为了验证其输出能力,在转速530 rpm 下,外接不同阻值纯电阻测其输出功率,如图10 所示。 可以看出随着外接阻值的增大,输出功率也随之增大,并在90 kΩ 时达到最值8 mW,随后逐渐下降。 值得注意的是在40 kΩ~220 kΩ 范围内其同样具有良好的输出能力。

图10 不同负载下输出功率

图11 能量采集器电容充电电路图
由于非线性磁力的周期性作用,压电悬臂梁产生振动,并将其转化为电能输出。 但是由于振动时压电材料应力方向的周期性变化,输出的信号呈现为交流信号。 为了进一步测试其输出性能,通过标准桥式整流电路所示对输出信号进行整流后,为50 B、3.3 μF 电容器进行充能测试,结果如图12 所示。 在固有频率转速下,压电能量采集器6 s 便达到了最大充电电压34.23 V,两个旋转磁铁的充电速率更高,4 s 便达到了最大充电电压。 计算其充电功率,分别为322.21 μW 和483.32 μW,使用两个旋转磁铁的功率也更大。 验证了更多磁铁数量的磁铁更有利于能量采集。
5 结论
为了提高能量采集效率、解决传统旋转式压电能量采集器结构复杂的问题,提出了一种外加非线性磁性力的旋转式压电能量采集器。 利用旋转磁铁的磁力激励使压电悬臂梁产生振动,进而利用压电材料进行能量采集。 首先基于电磁学理论,建立了旋转磁铁之间的磁势能和磁力方程。 基于2-D 非线性欧拉-伯努利梁理论建立了压电悬臂梁的数学模型,利用哈密顿原理建立了其非线性动力学方程,并通过Galerkin 方法对方程进行离散化处理,推导出压电悬臂梁系统的非线性常微分方程并进行无量纲化处理。 利用谐波平衡法分析了压电悬臂梁的稳态响应特性,求出了压电能量采集系统的大变形数学模型,通过数值仿真方法研究了不同参数对系统的影响及其变化规律。 从数值仿真的结果可以看出,随着激励幅值增大,系统的响应幅值随之增大,并且非线性特性显著增大。 通过对系统的动力学响应分析,得出当外界激励幅值为1.2,频率为1 的情况下,系统产生混沌现象。 继续增大激励幅值,系统由混沌运动转变为大幅周期运动,输出电压密度大幅提升,能量转化效率大幅提高,将更多的能量转化为电能输出。 理论分析知磁铁个数与最佳输出功率所需的转速成反比,应用的磁铁数目越多,所需的转速越小。 为了验证该能量采集器的性能,搭建了实验平台进行了性能测试,得出该能量采集器的最大开路输出电压能达到43.6 V,并且验证了旋转磁铁数目与转速的关系。 当环境转速较低时可以提高磁铁数量降低共振转速,当环境转速较高使可以减少磁铁数量提升系统的带宽。 在最佳输出电阻下,该能量采集器输出功率能达到8 mW。 当应用该能量采集器对电容进行充电时,单双旋转磁铁充电功率分别高达322.21 μW和483.32 μW。 综上所述,该能量采集器确实有着良好的能量采集性能,未来可进一步开发利用为无线传感器节点和旋转机械结构中的电子元件供能,实现能量的回收与利用。
