基于激光点云技术的地铁盾构隧道错台智能检测方法*
2023-11-07谢嘉伟魏志恒姚霄汉陈万里李春翔
谢嘉伟 魏志恒** 姚霄汉 陈万里 李春翔
(1. 中国铁道科学研究院集团有限公司城市轨道交通中心, 100081, 北京;2. 北京石泰集团有限公司, 100041, 北京;3. 北京市轨道交通运营管理有限公司, 100068, 北京∥第一作者, 助理工程师)
GB/T 39559.3—2020《城市轨道交通设施运营监测技术规范 第3部分:隧道》提出对隧道错台进行检测,即通过测量手段获取隧道表面不同时期的几何形态特征,并将其与标准设计数据进行对比得到变形信息,同时建立时序变形图谱对隧道变形数据进行分析,以指导地铁隧道的维护。传统地铁隧道病害检测技术主要以定点式传感器检测和单点激光测距技术为主[1]。
传感器检测方法仅能检测隧道部分点位变形,无法获得整体变化信息,而且实施时需要大量的检测设备,花费成本高昂。单点激光测距技术以全站仪和测量机器人为主,只能获取有限的监测点变化,依旧无法获得整体变化信息,而且数据获取的精度容易受环境影响。随着微电子技术和信息技术的不断发展,激光点云技术逐渐出现在大众视野中,其应用工况包括:数字高程模型制作、三维建模、农林普查、土方计算及地质灾害监测等。
本文对城市轨道交通隧道错台检测技术进行了论述,提出运用激光点云技术[4]对隧道错台进行检测的方法,通过智能化的检测和分析推动城市轨道交通基础设施检测技术的绿色化与智能化发展。
1 激光点云技术的检测原理
激光扫描技术作为一项与GPS(全球定位系统)比肩的测绘领域新技术,集激光技术、计算机技术、传感器技术、测绘技术等多种技术于一体,其核心是激光测距技术和扫描控制技术。激光测距技术通过主动发射激光到目标物表面,采用记录发射与接收激光信号的时差来计算目标物与扫描仪中心的距离:
d=ct/2
(1)
式中:
d——目标物与扫描仪中心的距离,单位m;
c——光速,单位m/s;
t——发射与接收激光信号的时差,单位s。
为实现三维方向上的扫描,需在激光器上加装水平转台。当激光器工作时,记录水平转台所在位置角度φ和光学扫描系统所在位置角度θ,根据测距值与仪器本身所在三维空间的坐标值,推算出目标物在以仪器中心为原点的三维空间坐标系中的坐标信息。三维激光测量原理如图1所示。

图1 三维激光测量原理图
目标点的坐标(x,y,z)按式(2)进行计算:
(2)
2 点云数据处理技术
地铁盾构隧道在数据采集完成后,经过多传感器融合求解得到1条长线型的空间三维点云数据,在进行隧道变形检测分析之前,对点云数据进行处理。点云数据处理的核心技术研究包括:隧道断面的提取及拟合去噪技术,灰度图和深度图自动生成技术,以及隧道限界、椭圆度、收敛、错台等结构病害自动分析技术。数据预处理流程如图2所示。
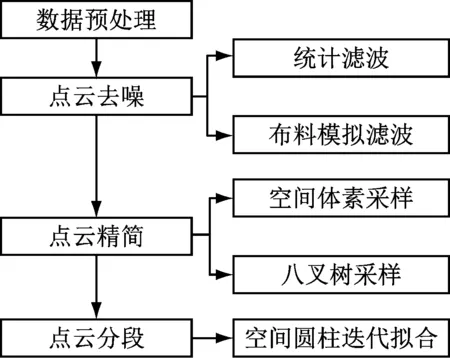
图2 点云数据预处理流程图
盾构隧道点云数据经预处理后,复杂线型的隧道点云被分成数条直线段的点云,且每个隧道表面点除了坐标信息之外,还包括里程信息。在进行隧道变形检测时,直接对空间直线段的隧道点云进行处理,并基于点云数据对盾构隧道变形检测分析方法进行研究。地铁隧道变形检测技术路线如图3所示。
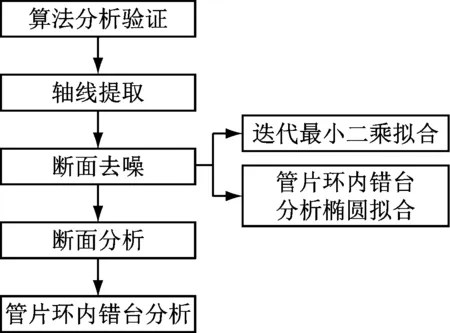
图3 地铁隧道变形检测技术路线图
2.1 隧道断面的提取和拟合去噪技术
2.1.1 隧道中轴线与断面提取
利用点云数据对隧道进行变形检测时,隧道中轴线的提取尤为重要。中轴线反映了隧道的姿态及走向,同时也是隧道里程计算、断面提取等数据处理与分析的基础。隧道中某一段的中轴线可以用一个定位点加一个方向矢量来表示。运营期的盾构隧道在局部会存在一部分变形,但是其整体结构不会有太大变化。直线段的隧道点云数据在整体上符合空间圆柱面的特征,可以通过拟合空间圆柱面的方式提取中轴线。
2.1.1.1 隧道中轴线提取
经过空间圆柱迭代拟合分割算法的处理,提取到一系列隧道轴线定位点,由这些点首尾相连即可得到隧道的中轴线。地铁隧道被分为若干长直线段,直线段两端的定位点连线即为该段隧道点云的中轴线。
2.1.1.2 隧道断面点云提取
隧道断面是其变形分析的最小单元,其提取对后期的隧道变形分析非常有意义,直接影响到隧道变形检测的结果。中轴线的提取结果可以用一个空间定位点与一个三维方向向量来表示。由于点云的离散性,需要为隧道断面设置一个提取厚度以保证断面的完整性,随后即可按照检测区间里程起始点与检测里程间隔要求提取断面。具体步骤如下:
步骤1 计算隧道变形检测起始位置在隧道中轴线上的定位点p1(x0,y0,z0),根据中轴线方向向量[abc]得到该点处的平面方程:
a(x-x0)+b(y-y0)+c(z-z0)=0
(3)
步骤2 计算所有数据点(xi,yi,zi)到平面的距离d:
(4)

步骤4 根据设定的检测间隔,重复步骤2和步骤3,完成所有隧道断面的连续提取。
2.1.2 隧道断面点云去噪
隧道断面点云中包含隧道管线、护栏等附属设施所形成的混杂点,此类噪声点在前期无法剔除,但在完成断面提取之后,则可以通过一定的算法将其去除。隧道断面点云在理想情况下是一个标准圆形,在数据采集时,受到壁挂物等隧道附属设施的遮挡,导致隧道壁点云采集不全而且混杂部分非隧道壁点云,但是在整体数据集中隧道壁点云仍然占据绝对比例。地铁盾构隧道在长期运营中发生了轻微的形变,大量经验研究表明,变形后的隧道断面可以视为椭圆。本文基于椭圆拟合的思想,采用断面点云去噪算法,将断面点云进行椭圆拟合,将符合椭圆特征的点视为有效点,将不符合椭圆特征的的点视为噪声去除,从而提取出隧道壁点云用于后续分析[2]。
利用最小二乘算法采用全局多项式方程计算的形式解算椭圆方程,当断面点云数据中含有噪声点时,直接采用最小二乘法不能解算出准确的椭圆参数。隧道壁点云在整个断面点云中占比很大,若能够不断消除大尺度噪声点,拟合结果就会逐渐向准确值收敛。椭圆的一般表达式为:
ax2+bxy+cy2+dx+ey+1=0
(5)
将1组隧道断面数据代入式(5)可得:
(6)
则有:
BX=L
(7)
其中:
误差方程V为:
V=ax2+bxy+cy2+dx+ey+1
(8)
采用最小二乘法求解得到X。
迭代最小二乘椭圆拟合算法的具体实现步骤如下:
步骤1 输入断面点云数据集,通过设置迭代收敛条件拟合平均误差m。
步骤2 采用最小二乘法进行椭圆拟合,根据误差方程计算每个点到拟合椭圆的误差。
步骤3 对所有数据点的拟合误差进行统计分析,计算拟合误差均值与中误差;若拟合误差均值小于m,则迭代终止,执行步骤5;若拟合误差均值大于m,则执行步骤4。
步骤4 剔除所有拟合误差与拟合平均误差大于3倍平均误差中误差的数据点,执行步骤2。
步骤5 输出去噪后的断面点云数据集。
2.2 灰度图和深度图自动生成技术
针对激光扫描仪初始采集的隧道断面点云数据成果,设定起始里程、前进方向、管片宽度、隧道直径、钢轨类型、编码频率、起始帧和终止帧,通过自动配准的方式,结合高精度IMU(惯性测量装置)同步采集的惯导数据和DMI(车载人机界面)编码器数据,将点云数据中的轨道平面与标准轨道平面进行配准,实现点云和POS(基于点的信息管理系统)的高精度配准,得到点云数据相对于轨道平面的平移量和旋转角度。配准工作完成后自动将点云数据生成6 848像素×4 931像素的高清灰度图和深度图,两种影像均可以在二维视图中显示,并均可测量距离或面积,且每个像素均包含绝对坐标、里程等信息。基于隧道点云与灰度图,对隧道管片进行自动识别与分割,按照管片与里程计算断面椭圆长短轴、偏转角及椭圆度等参数,分析与检测隧道变形并对其进行定位。
2.3 错台病害自动分析技术
输入地铁盾构隧道管片环面深度图,提取所需项点信息进行VIT(格式转换),通过主干网络ResNet(深度神经网络)输入到FPN(特征金字塔)中,对多尺度特征进行了充分融合,同时基于典型病害不同尺度的特征进行不同尺度目标的预测;通过卷积对结果进行分类、box(标定目标对象的位置和大小)及mask(确定每个对象的精确形状和边界)等处理。统计点云数据集的高程信息,对该信息进行量纲一化处理,而后映射RGB(彩色图像)颜色值对点云进行渲染。采取平面拟合的方式对点云表面的法向量进行计算。选取一定数量的数据点和邻域点,利用邻域点拟合平面,则该拟合平面的法向量即为数据点的法向量,将该法向量量纲一化映射RGB颜色值实现对点云的渲染。圈取项点信息,通过RGB获取深度值的方法计算该深度值位置左右的深度差;采用“根据深度值位置,反算点云位置”的方法,计算点云位置左右错台量的差值。地铁盾构隧道管片环面错台病害自动分析流程如图4所示。

图4 地铁盾构隧道管片环面错台病害自动分析流程图
盾构隧道内错台是由管片错位或管片破损导致的,在点云数据体现上,错台处会出现急剧的变化。错台检测包括环间错台与环内错台。错台量的计算原理是检查点云数据的连续性,通过计算管片内所有点到某一点距离的差值,并比较相邻点间的差值变化,判断是否出现错台。管片环内错台量检测的具体步骤如下:
步骤1 将隧道断面点云坐标原点平移至椭圆中心点,计算每一个点云的极坐标值。
步骤2 将点云按照极坐标角度值从小到大进行排序,计算极坐标半径与设计半径之间的差值。
步骤3 按照极坐标角度值顺序比较相邻数据点差值,若超出设定距离阈值,则视为出现错台。由于断面点云并不连续,在进行去噪后部分隧道壁点云缺失。若相邻数据点间半径差值之差超过距离阈值,同时角度之差在角度阈值范围之内,则视为出现错台,记录错台所在的隧道断面编号、错台角度及错台量。
步骤4 输出错台检测结果。
3 激光点云技术的检测流程
激光点云技术的检测流程如下:
1) 固定好选择观测的时段,利用激光设备进行数据采集,将数据输入到上位机,利用上位机中的后处理软件提取隧道点云数据。
2) 基于拟合的思想,通过圆柱拟合和断面椭圆拟合提取隧道壁点云,利用统计滤波[3]去除离群点,利用布料模拟滤波[4]去除地面点实现点云数据的去噪处理,并利用空间体素采样算法[5]对隧道点云数据进行精简,以提高检测的精度;同时在进行变形分析时,剔除隧道壁点云以外的数据点,避免对检测结果的干扰。
3) 将过滤后的数据作为输入项,利用编码器和点云进行抽稀、插帧处理,加载图片信息和里程信息,将点云坐标转为平面坐标,并将距离信息进行插值平滑处理生成里程信息。
4) 将点云坐标转为相对坐标。
5) 将强度、距离信息按行平滑处理,以当前点云的最优距离计算当前点云距离差,计算完成后将该差值进行量纲一化处理并且转为RGB图像,生成彩色图片,通过软件显示图片和位置信息,并通过添加里程桩和长短链的方式对里程信息进行修正。
6) 在盾构隧道管片环面深度图内添加衬砌变形内容,通过三维窗口确认衬砌变形区域,最终生成含里程信息,以及衬砌变形区域的角度、面积和深度等信息的高精度检测报告并对外进行输出。
4 激光点云技术在地铁盾构隧道中的应用
4.1 设备介绍
移动三维激光扫描系统主要由Z+F PROFILER 9012型激光断面扫描仪、高精度惯性测量单元、双频三星GNSS(全球卫星导航系统)板卡(含天线)、车轮编码器及安装组件、多传感器同步控制电路,以及存储单元、电源管理与保护模块、平板/笔记本电脑等硬件集成。移动三维激光扫描系统硬件外观如图5所示。
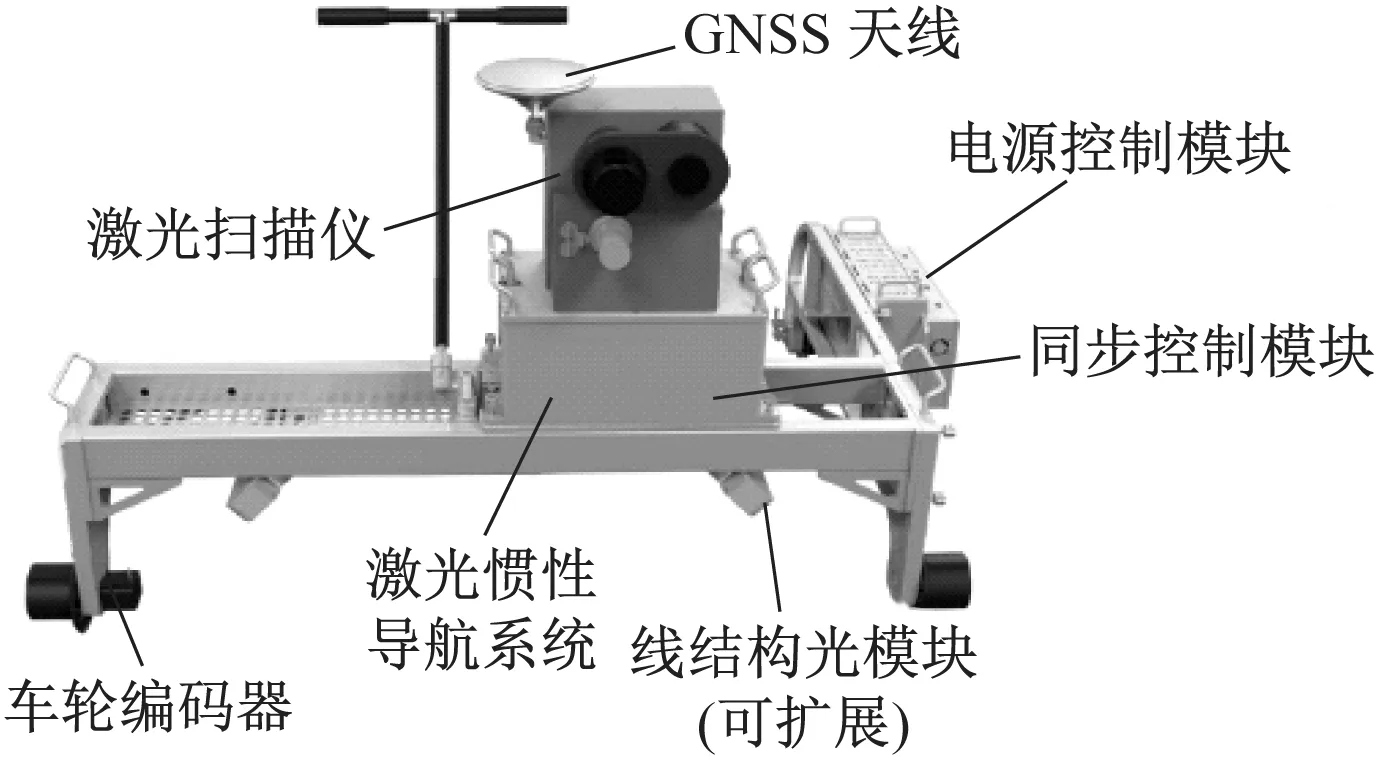
图5 移动三维激光扫描系统硬件外观
移动三维激光扫描系统中,Z+F PROFILER 9012型激光断面扫描仪的点云扫描速度高于100万点/s,断面扫描速度高达200 r/s,可以实现非常密集断面的高精度、高密度扫描,且这些海量数据可以在软件中显示和处理。激光断面扫描仪的主要技术参数如表1所示。

表1 激光断面扫描仪的主要技术参数
4.2 实例应用
以武汉某地铁盾构隧道为例,对其管片环面错台进行现场检测,如图6所示。

图6 武汉某地铁盾构隧道管片环面错台现场检测图
通过检测设备输出的盾构隧道高精度三维点云图像,如图7所示。
图7 地铁盾构隧道三维点云图像
运用激光点云技术输出的盾构隧道管片环面原始深度图如图8所示。
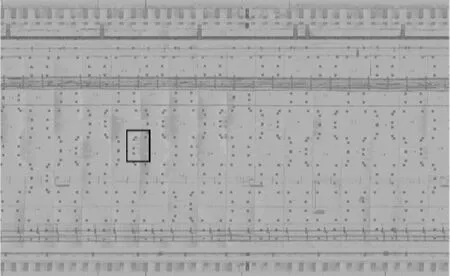
图8 武汉某地铁盾构隧道原始深度图(K148+076—K171+605)
4.3 对比分析
对图8输出的武汉某地铁盾构隧道原始深度图中矩形框位置放大图进行人工比对,其结果见图9。
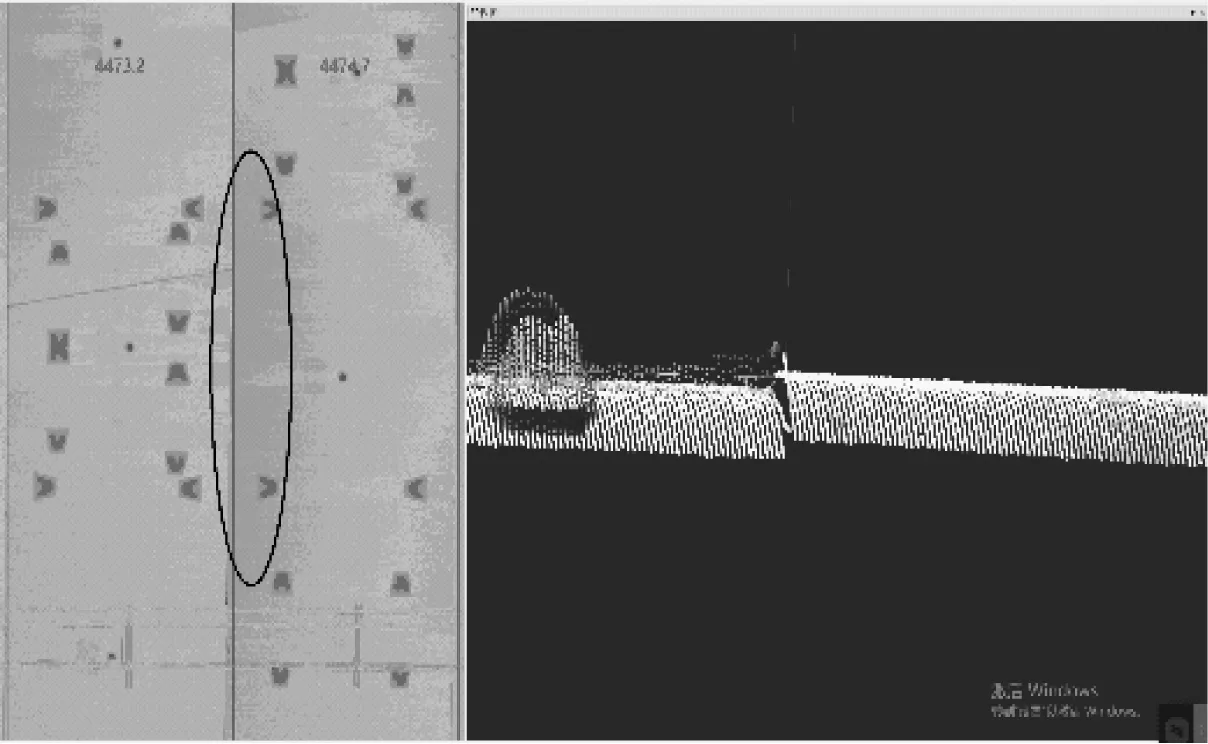
图9 经人工比对后的盾构隧道深度图(K148+076—K171+605)
通过后处理软件进行深度学习,得到K148+076—K171+605区段盾构隧道管片环面深度图如图10所示。对图10中矩形框圈取的位置进行局部放大,可直接看出通过深度学习后输出的错台识别图像。

a) 经后处理的深度图
利用同一段隧道同一设备不同时期输出的错台数据验证激光点云技术的重复精度,利用同一时段同一段隧道不同设备输出的错台数据验证激光点云技术的相对精度。地铁隧道错台量重复精度与相对精度随里程变化曲线如图11所示。

a) 重复精度
通过图11可以看出:运用激光点云技术进行隧道错台检测,同一段隧道同一设备不同时段输出的错台量平均偏差为0.357 5 mm,同一段隧道不同设备同一时段输出的错台量平均偏差为0.360 0 mm。这进一步验证了激光点云技术在隧道错台智能检测上的适用性和优越性。
5 结语
通过激光点云技术,实现了对隧道内错台的快速与精确检测。在列车运行速度为20~80 km/h的工况下,根据三维点云数据分析隧道内相邻管片间的错台并输出相关报告,提交错台量超过5 mm的区域;激光点云技术在提高检测精度的同时,突破了隧道错台检测的静态检测模式,实现了采用半自动化小车搭载的工作模式对隧道错台的动态检测。同时还可以将盾构隧道管片环面错台检测设备安装到工程车上进行自动化检测,极大地提高了隧道内错台的检测效率。后期可通过技术手段建立隧道全断面[6]病害库,在错台检测的基础上对隧道全断面进行检测,加强城市轨道交通基础设施检测体系建设,实现基础设施对象全覆盖智能感知,提高安全风险预警能力,为设备养护维修提供科学决策,提高养护维修效率,降低养护维修成本,保障城市轨道交通持续安全运营。
