基于解耦滑模的升力式飞行器欠驱制导方法
2023-11-06薛光伟辛万青许江涛谭浩天
薛光伟,辛万青,傅 瑜,许江涛,谭浩天
(1.北京宇航系统工程研究所,北京,100076;2.中国运载火箭技术研究院,北京,100076;3.哈尔滨工程大学,哈尔滨,150001)
0 引 言
升力式飞行器是一种采用升力体构型、可在大气层内长时间飞行的新式飞行器,飞行性能优异,近年来受到世界各国的广泛关注[1]。然而,大气层内存在各种扰动与不确定性,升力式飞行器面临的环境十分复杂,飞行过程中具有非线性、强耦合性和快时变的特点[2],欠驱动制导问题突出。
为满足新一代升力式飞行器的轨迹规划制导需求,Tian 等[3]针对可重复使用运载火箭(Reusable Launch Vehicle,RLV)的实时轨迹和姿态协调控制问题,提出了一体化制导与控制架构,实现再入轨迹快速优化。Halbe 等[4]在研究RLV 的轨迹塑造方法时,提出一种基于能量的次优制导技术,能够通过预测飞行器的攻角和倾侧角实现轨迹规划的目的。Chen等[5]针对RLV 的轨迹规划与制导律的设计问题,提出了一种利用攻角和倾侧角变化共同控制轨迹的在线预测轨迹规划与制导律设计方法,将能量作为积分变量有效解决轨迹规划面临的时间不确定性问题。为实现高升阻比飞行器的安全精确操纵,Zhang等[6]提出了一种基于阻力-速度-能量剖面的新型制导方法,采用了轨迹阻尼控制技术抑制欠阻尼长周期振动轨迹振荡。
解耦滑模控制是解决欠驱动控制问题的有效手段。于涛等[7]针对欠驱动过桥式吊车系统的稳定控制问题,提出了一种解耦滑模控制器设计方法,从理论上分析了各滑动面的渐近稳定性。朱民雄等[8]针对具有强非线性的空间飞行器系统的控制问题,提出了具有优良鲁棒性解耦滑模控制的方法。张尧等[9]基于反步滑模与扩张状态感测器的设计思想,针对导弹制导控制问题,提出了一种一体化三通道解耦设计方法。Liu等[10]针对导弹在纵平面拦截静止目标的拦截场景,基于滑模控制提出了新型制导律,实现在不需要考虑小角度假设的情况下对导弹进行有效制导控制的目标。Yan等[11]在研究非合作机动目标的拦截问题时,提出一种积分滑模控制律,实现了指数收敛和具有自动驾驶滞后的高终端制导精度目标。在解决参数不确定、干扰严重、多通道强耦合的倾斜转弯升力式飞行器控制问题时,解耦滑模控制表现出良好的全程解耦与鲁棒稳定[12]。
为解决升力式飞行器欠驱动制导问题,本文研究了一种基于解耦滑模控制器的制导方法,建立高度、侧向和射向3个通道的跟踪误差模型和滑模系统,将飞行器侧向通道的滑模面通过中间变量引入纵向通道,求解出攻角和倾侧角,实现升力式飞行器的轨迹鲁棒跟踪飞行。
1 飞行器运动数学模型
1.1 飞行动力学模型
在惯性坐标系中,升力式飞行器质心运动动力学方程的一般形式为
式中P,R,Fc,mg,F′k分别为飞行器的推力、空气动力、控制力、引力与附加哥氏力。对于本文研究的无动力升力式飞行器,推力、控制力为零,在构建运动动力学模型时,仅需考虑空气动力、引力和附加哥氏力。通过坐标系间转换,即可获得在弹体坐标系、地心坐标系、位置坐标系和弹道坐标系与速度坐标系下的具体表达形式。位置坐标系下的运动数学模型可写为式(2)。
本文采用由美国洛克希德-马丁公司设计的CAVH 高性能机动再入飞行器(High Performance Maneuvering Reentry Vehicle,HPMARV)为研究对象,其最大升阻比约为3.5,质量为907.186 kg,气动参考面积为0.483 9 m2,部分状态下的气动数据如表1所示。
阻力系数和升力系数存在近似计算公式:
对于升力式飞行器,当速度超过Ma=5 时,气动系数随速度变化不大,可近似忽略马赫数的影响,认为气动系数仅由攻角α决定。基于式(3)可以推导得到最大升阻比对应的升力系数和阻力系数为
定义升力系数比η:
则升力系数和阻力系数可分别表示为
其中,
式中h1∼h3为地球自转相关项。
1.2 控制量约束
首先,控制量[u1,u2,u3]=[η2,ηcosσ,ηsinσ]存在非线性等式约束:
由式(9)可知,飞行器的独立控制量仅有两个,在xyz三位置控制下,升力式飞行器属于欠驱动系统。飞行器制导律输出的制导量为攻角α和倾侧角σ。考虑飞行器的气动能力,存在以下约束:
取α∈[5°,20°],σ∈[- 80°,80°],在此范围内可认为升力系数比η随攻角单调变化,式(10)中的攻角约束可进一步转化为η约束。最终,除式(9)和式(10)外,控制量还应满足的实际物理约束有:
1.3 轨迹约束
飞行器在飞行过程中必须满足驻点热流、动压、过载等轨迹约束,如式(12)所示。
式中Q̇为驻点热流密度;K为与飞行器构型相关的系数;q为动压;ny为法向过载;N为飞行器所受法向力;Q̇max,qmax,nmax分别为驻点热流密度、动压和法向过载的最大约束。
2 解耦滑模基本原理
考虑一个单输入多输出系统,其系统模型为
将上述系统分为两个子系统有:
可以设计解耦滑模控制器,通过定义中间变量w,用w代表子系统A的信息并引入子系统B的滑动面中,实现利用u对两个子系统的欠驱动渐进稳定控制。
定义系统A的滑模面为
构造整个系统的滑模面为
其中,w为定义的中间变量,其表达式为[7]
式中wu为|w|的上界。
利用等效控制法,可求出等效控制量为
基于李雅普诺夫定理,选取能量函数为
求导可得:
为了保证系统的稳定性,使V̇< 0,选取系统的切换函数为
式中η和k为正常数。
最终,系统的控制输入可得:
可以证明,采用上式所示的控制律,可以使得整个系统的滑模面S和两个子系统的滑模面s1、s2都趋于0。
3 升力式飞行器的解耦滑模制导律
根据飞行器的制导运动学模型,建立其误差跟踪模型:
式中 [ẍc,ÿc,z̈c]为三通道的过载跟踪指令,通过跟踪的参考轨迹产生;[ẍe,ÿe,z̈e]为跟踪误差。
基于解耦滑模原理,为处理y和z之间的制导耦合问题,定义解耦滑模面如下:
其中,c1~c3为滑模面参数,其余各变量定义为
式中 [xc,yc,zc,ẋc,ẏc,żc]分别为北天东坐标系NTE下的位置和速度跟踪指令;wu为|w|的上界。
对s3求导有:
令b3=c3że+f3-z̈c,整理式(28)可得:
为保证s3ṡ3≤0,指数趋近律ṡ3= -ε3sgn(s3)-ks3s3,其中ε> 0且k> 0,设计u1的控制律为
对s2求导有:
其中,
其中,
为保证s2ṡ2≤0,指数趋近律ṡ2= -ε2sgn(s2)-ks2s2,设计u2的控制律为
求解控制量u3,将式(36)代入式(31)有
其中,l13=k12l23+k13,p1=k12p2+b13。考虑控制量间约束,结合式(36)和式(37)得到关于控制量u3的一元二次方程:
解上式得u3并代入式(39)中,即可求解所有的控制输入量。
4 数值仿真及分析
4.1 仿真条件
本研究采用CAV-H 的数学模型进行仿真试验验证。根据实际工程需求,设计飞行器的初始点参数如表2所示(位置、速度已归一化)。
飞行过程中,飞行器的各项性能受到不同程度的限制,综合飞行器性能约束、干扰偏差及跟踪轨迹情况,设置解耦滑模制导律的控制参数。表3给出了解耦滑模制导律的参数设置情况。

表3 解耦滑模制导律参数设置情况Tab.3 Parameters setting of decoupling sliding mode guidance
4.2 仿真结果与分析
Case 1 标准工况下的数值仿真结果如图1 至图5所示。结果中的位置、速度、时间均已归一化处理。

图2 速度-时间曲线(Case1)Fig.2 Velocity curve over time

图3 位置和速度误差随时间变化曲线(Case1)Fig.3 Position and velocity error curve with time changing
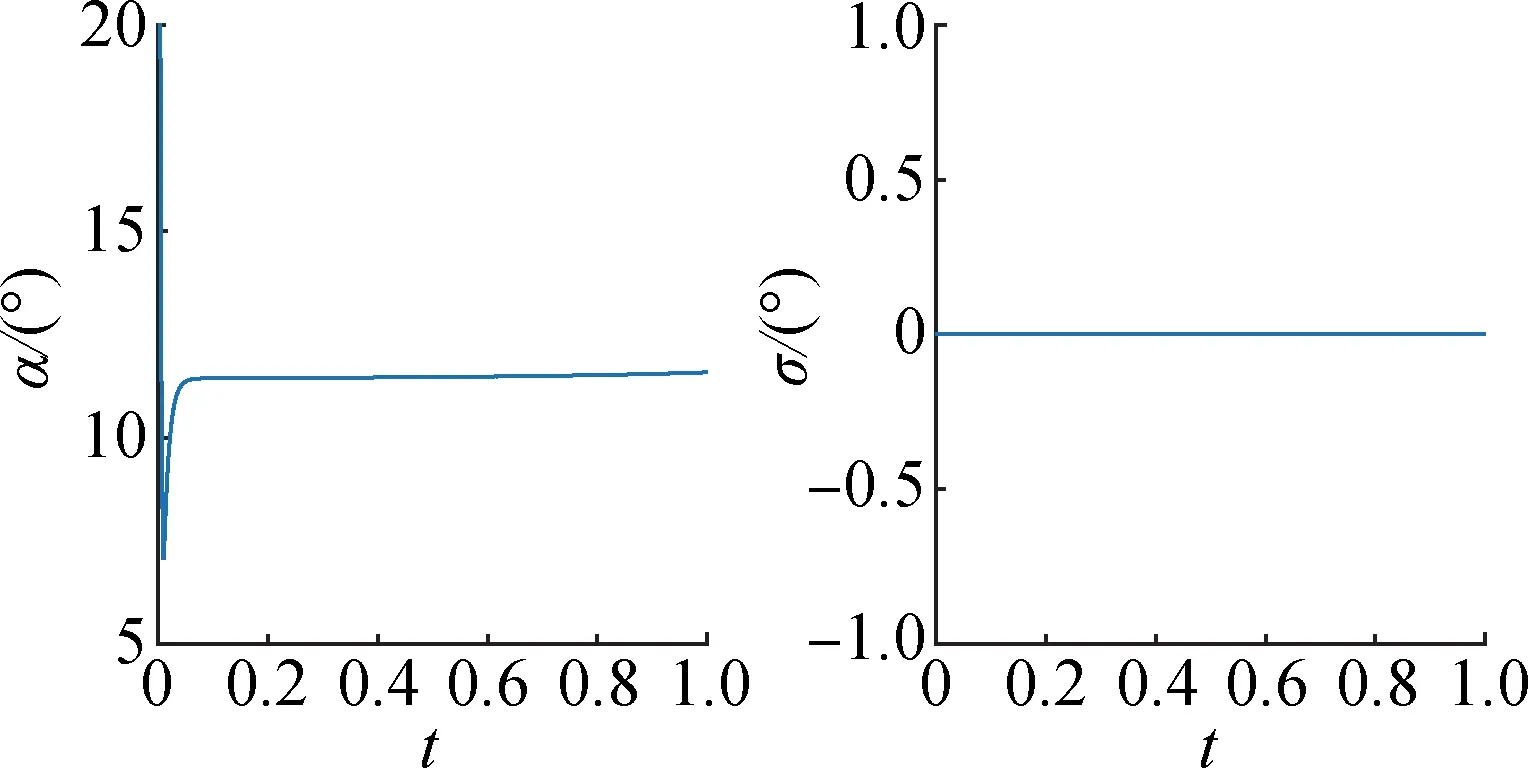
图5 攻角和倾侧角随时间变化曲线(Case1)Fig.5 Curve of angle of attack and heeling with time changing
仿真结果表明,在本文所提出的解耦滑模制导律作用下,升力式飞行器能够以较好精度跟踪规划轨迹,侧向误差总体约束在[-500,500]m 范围内。高度与速度误差随时间逐步收敛减小,加速度满足实际的弹体约束,并贴合轨迹规划结果,攻角和倾侧角在给定气动约束内,且呈现较好的变化趋势,α∈[7.28°,20°],σ∈[-2°,2°],满足飞行制导律的性能要求。y向与z向的综合响应情况受解耦因子wu的取值影响,需根据实际的指标要求,结合滑模指数趋近律设计参数进行权衡性选取。
Case 2 在±10%和±5%气动偏差范围下,开展数值仿真试验,结果如图6至图10所示。
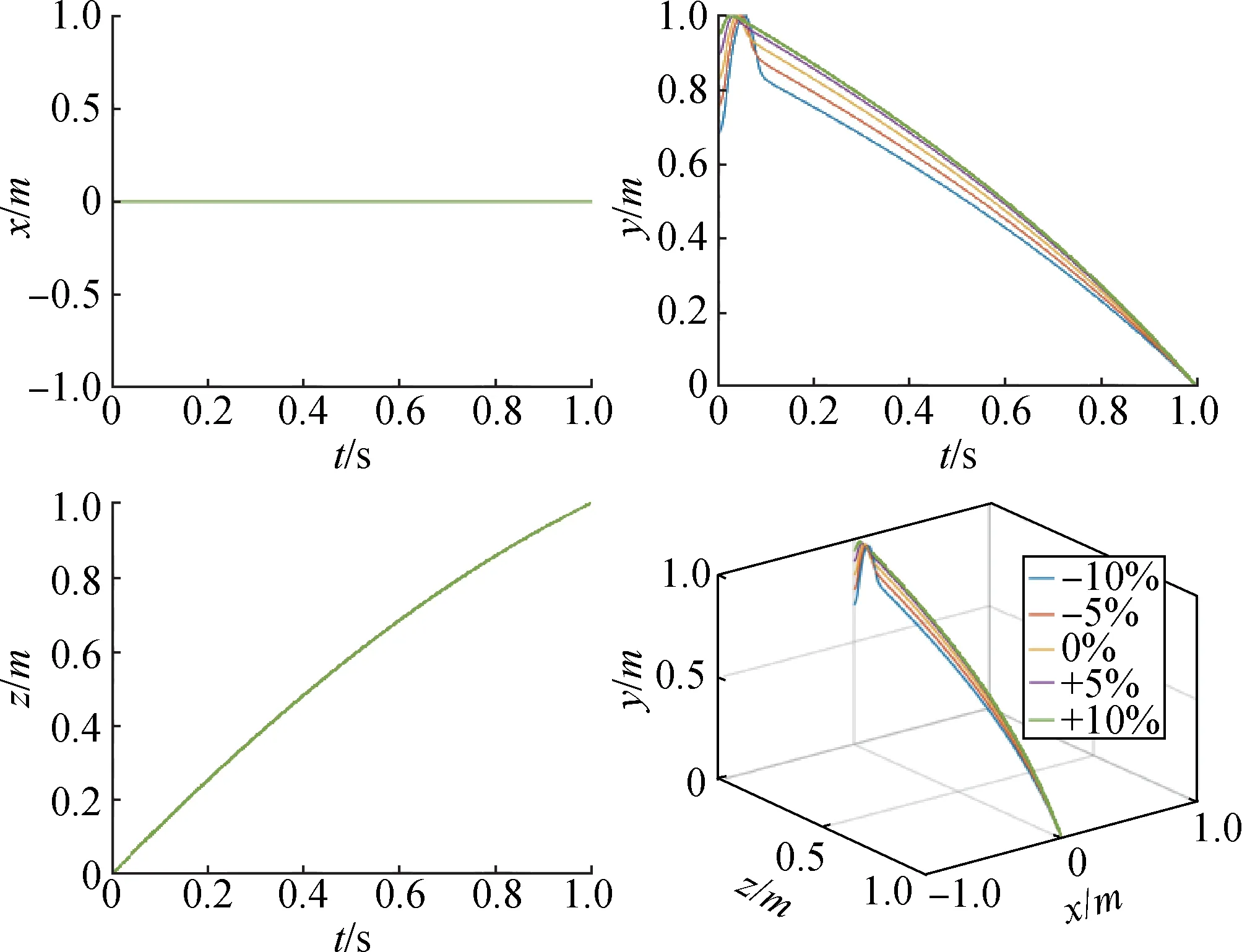
图6 CAV-H 飞行轨迹曲线(Case2)Fig.6 CAV-H flight path curve
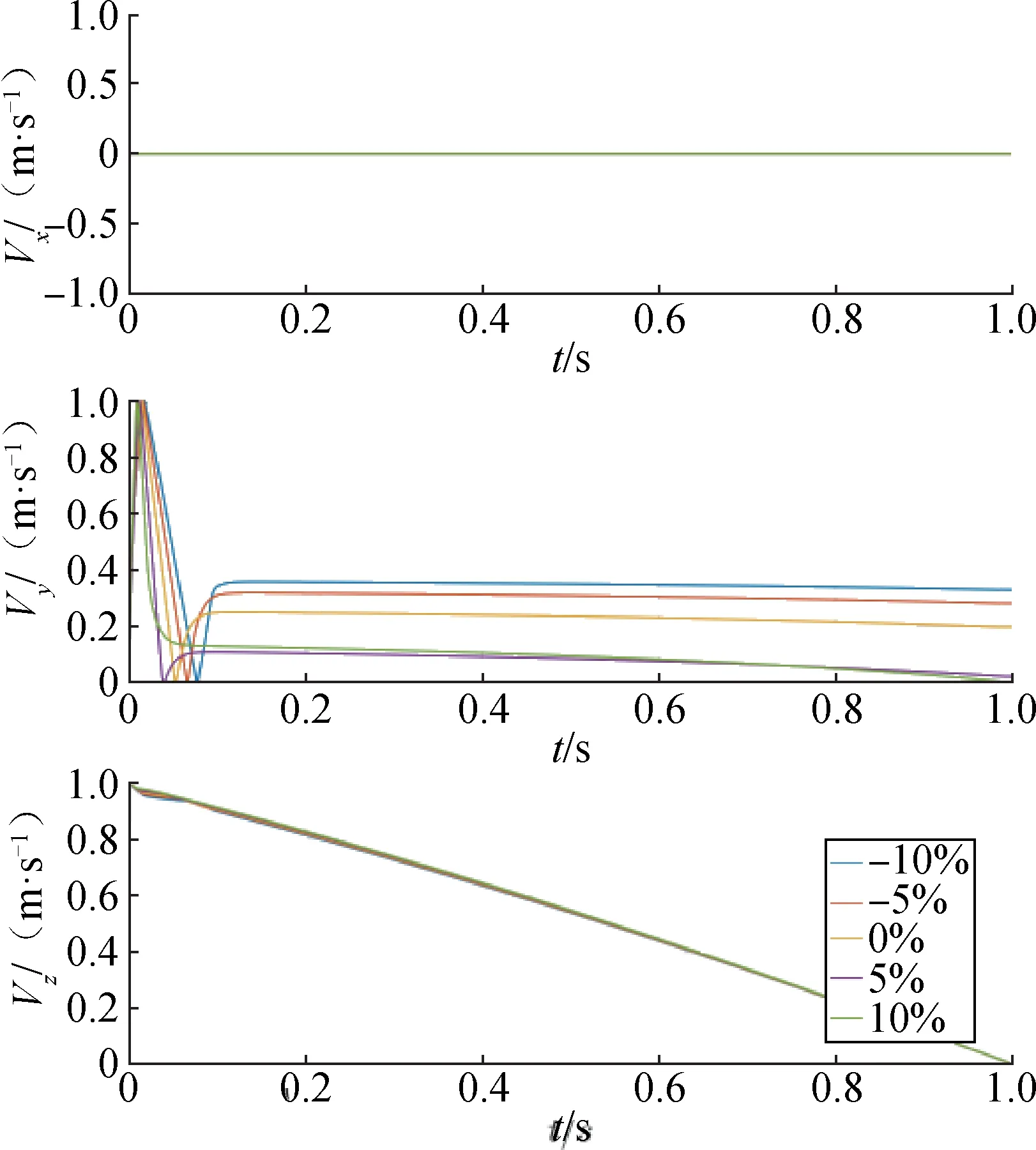
图7 速度-时间曲线(Case2)Fig.7 Velocoty curve over time

图8 位置速度误差随时间变化曲线(Case2)Fig.8 Position and velocity error curve with time changing
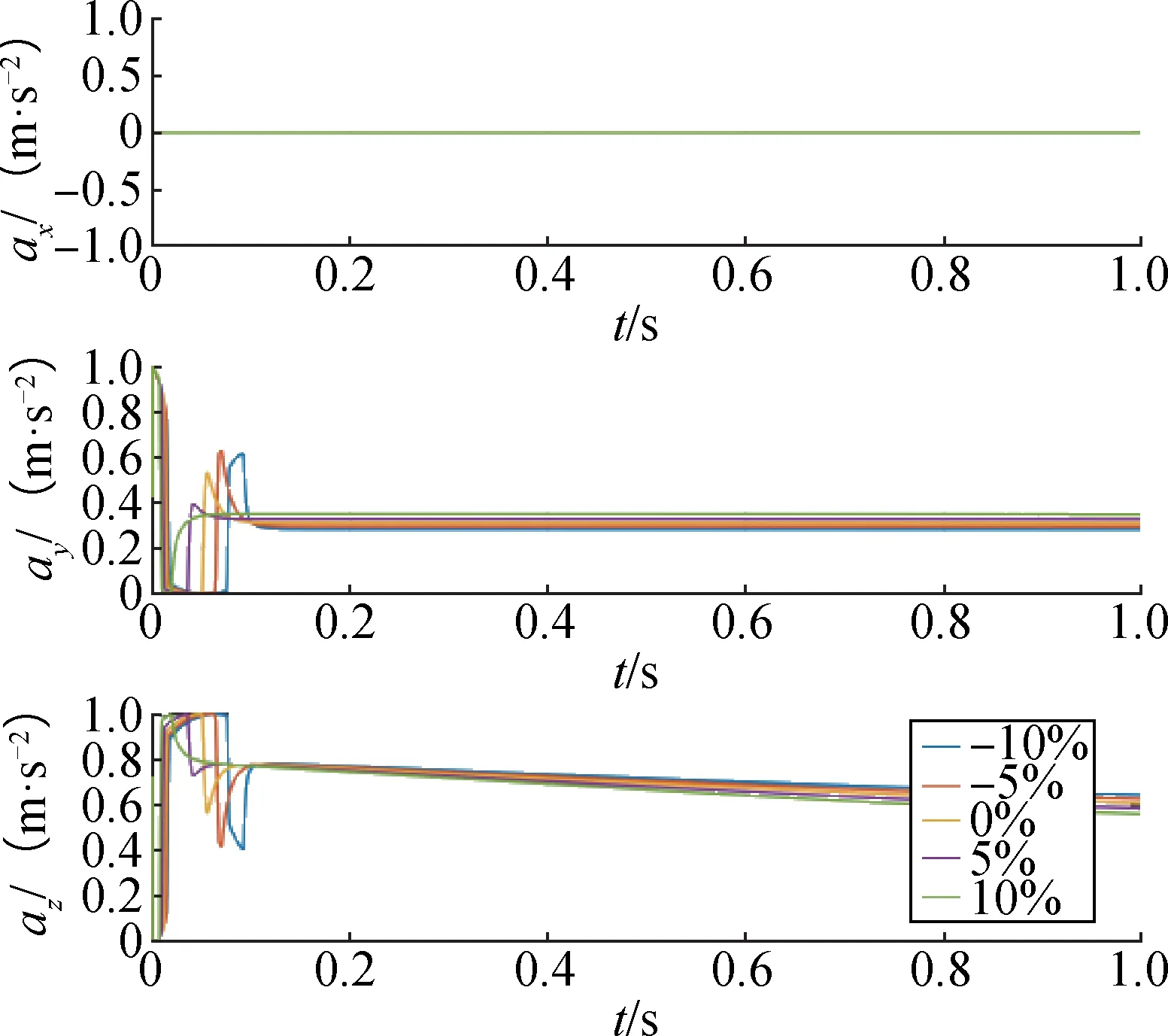
图9 加速度-时间曲线(Case2)Fig.9 Accelerated speed curve over time
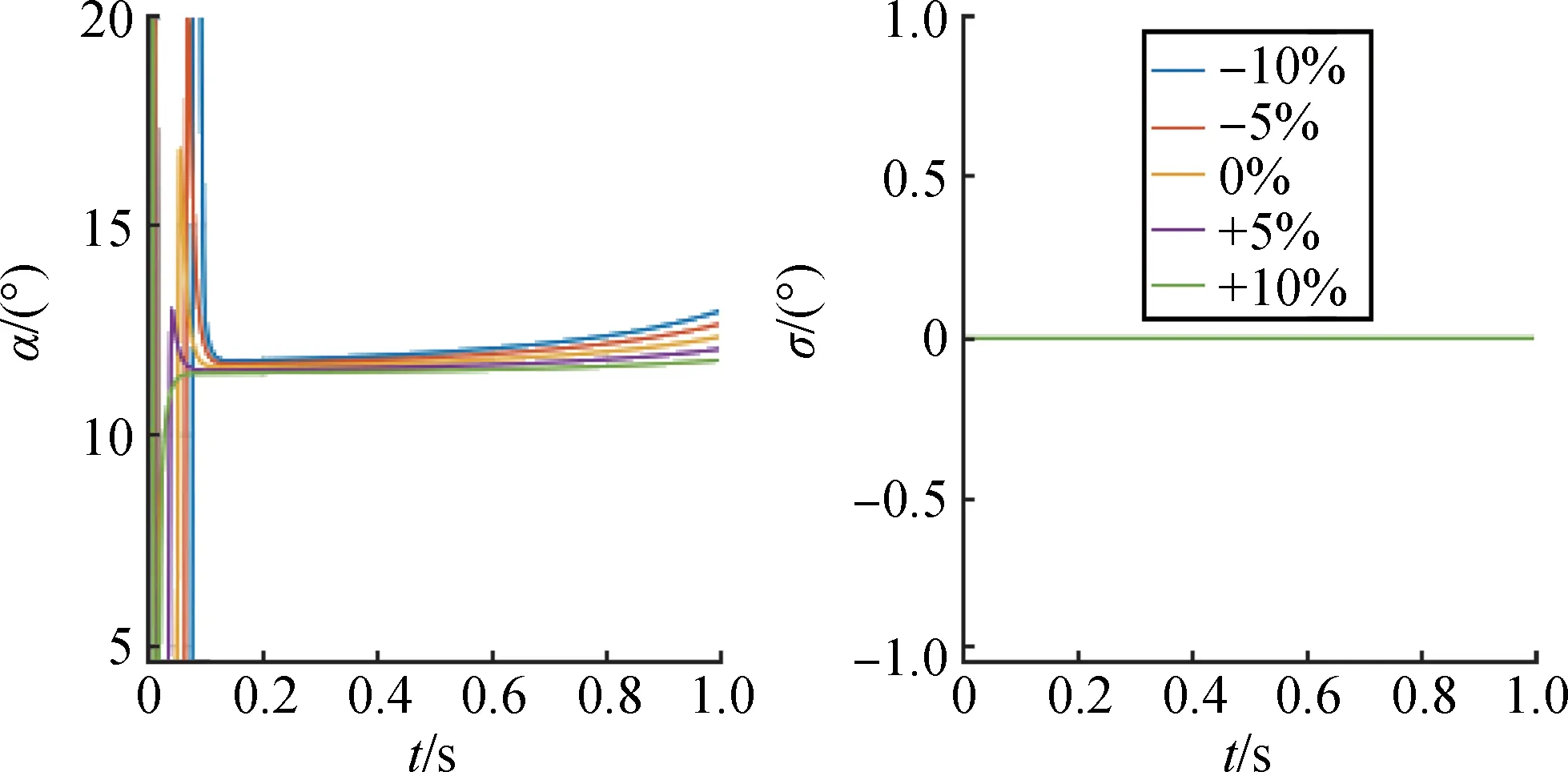
图10 攻角和倾侧角随时间变化曲线 (Case2)Fig.10 Curve of angle of attack and heeling with time changing
结果表明,解耦滑模制导律具有较强的鲁棒性。在10%气动偏差、一定的位置和速度偏差情况下能够保持飞行轨迹的相对跟踪性能,相关误差在可接受范围内:x约束与飞行误差走廊范围内,y的误差递减规律与未经气动拉偏时基本一致,z方向因气动系数的拉偏而出现一定误差减小变缓的情况,与解耦因子wu设置相关。
5 结束语
针对升力式飞行器于平衡滑翔段的跟踪制导问题,设计了一种基于解耦滑模的欠驱跟踪制导方法。建立了升力式飞行器的运动数学模型及控制量简化与约束,利用解耦滑模和指数趋近方法形成了欠驱跟踪制导律,易于工程实现,使控制参数设计更简便。同时,开展了平衡滑翔段的轨迹跟踪仿真验证研究,表明本文所提方法能够使飞行器有效跟踪参考轨迹,总体误差递减收敛,在气动参数及初始状态偏差下具有鲁棒性,满足轨迹跟踪性能指标要求。
