仿地飞行与定高飞行创建三维模型的差异分析
2023-11-06陈嘉
陈 嘉
(遵义市水利水电勘测设计研究院有限责任公司,贵州 遵义 563000)
0 引言
贵州的地貌类型复杂,境内地势西高东低,自中部向北、东、南三面倾斜,呈三级阶梯分布。由于飞行作业区域多为山地,高差较大,常规的定高飞行只能在比较平缓的小区域范围内作业,而大范围,特别是长带状地形的航空摄影,想要保证相应精度一致且优于1:2 000的成果,就不得不采用仿地飞行。
1 项目概况
习水县位于贵州省北部。习酒镇201 厂工程位于习酒镇东侧瓮坪村境内,桐梓河右岸缓斜坡上,地形总体趋势为东高、西低。厂区位置位于一块开挖出来的平坦区域,东西两边都是山地,落差较大。任务的目的是将厂区和两旁的山地通过倾斜摄影测量,创建三维立体模型,用于对外展示厂区区域布置,也便于研究后续的厂区扩建问题。
2 作业准备
为了在同等条件下生产出三维立体模型,所以两种飞行作业方式均在同一天相同的时段进行,并且航高都固定为350 m,突出反映出两者的差异性。
选择旋翼无人机D2000,相机型号选用CAM3000,搭载倾斜模块D-OP3000,有效像素:2 400万×5、镜头焦距:35 mm(倾斜)、25 mm(下视)。
3 作业流程
3.1 外业飞行
3.1.1 定高飞行
在测区范围内选择一个平坦较高的地势,大致观察有无高压横架电线和铁塔,标记在电脑的地图上。打开无人机应用APP,选中测区范围,参考标记的铁塔等危险源,以测区内最高点的高程,规划出航向重叠度为80%、旁向重叠度为60%、飞行时间40 Mins 内的航线。开始作业后,注意飞行姿态变化,保证作业过程的安全;飞行结束后,将包含影像和POS的数据下载保存。
3.1.2 仿地飞行
打开无人机应用APP,在测区范围内进行高程数据预扫,生成一个略大于测区范围的KML 的预扫文件;接着在应用软件的航线模块中导入预扫KML文件,按照8 cm的GSD、航向重叠度为80%、旁向重叠度为60%规划航线,飞行时间控制在35Mins 之内。通过正射航拍,将得到的飞行数据导入应用软件APP中的数据处理模块,加载数据影像和POS数据,处理后得到测区的TIF格式下的DSM模型。
选择一个平坦较高的地势,打开无人机应用APP下的航线模块,加载DSM 模型后,按照测区范围规划一个航线重叠度80%、旁向重叠度60%、航高200 m的航线。开始作业后,注意飞行姿态的变化,保证作业过程的安全,飞行结束后,将包含影像和POS的数据下载保存。
3.2 像控采集:
按照像控布设的航测正常流程,像控点的布测应在航拍完成后,基于该飞行范围进行预先布设;在测区范围内实际测量中实地考察,满足布设要求的前提下进行采集。像控点按照一般要求及根据该地区地形特点,布设间隔不得超过300 m,树林茂密地区不得超过400 m,无法布设区域应在可以布设的区域加密控制点保证300 m×300 m 范围内有不少于3 个像控点(无特征地物区域在地势平坦区域加测高程控制点)。
注意相片拍摄时间与像控点时间和天气,相同时,地物基本位置、颜色不会变动,相近时注意地物颜色变化;像控点布设总体原则要易于与周边区分、易辨认、布点准确。
3.3 数据处理:
将得到的影像数据和POS 数据一一对应后导入到ContextCapture Center软件中。新建工程文件,添加影像数据,再导入所有影像位置和角元素的文本文件,将下视镜头拍摄的影像焦距设置为25 mm,斜视影像焦距设置为35 mm。在contextcapture3D 视图中查看pos 数据无误后(如图1),提交空中三角网测量。
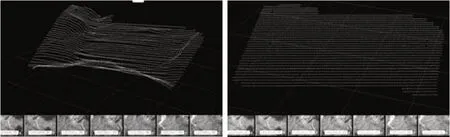
图1 contextcapture3D视图(左:仿地飞行;右:定高飞行)
根据特征提取算法对影像进行特征提取,将建立的连接点和连接线先进行自由网平差,接着通过刺点的方式将控制点和自由网平差结果进行控制网平差。将生成的检查点和外业测量的检查点进行精度评定,符合要求后开展三维模型的建立。
根据影像数据结合空中三角网测量加密解算出来的各个影像外方位元素,运用多视影像密集匹配技术,生产出高密度点云能反映实景的数字表面模型数据(DSM 数据),将影像数据通过归一化和增强处理后,把高分辨率的纹理映射到DSM数据表面,生成完整的三维数字模型。
4 对比分析
4.1 精度对比
在模型精度方面,采用外业实测特征点用作检查点,将多个外业检查点坐标分别与三维立体模型上的对应点坐标进行对比,将其差值分别求出算术平均值,得出两者的平面误差分别为±(11 cm)和±(13 cm),高程误差分别为±(6 cm)±(9 cm)。精度差距不大。
4.2 质量对比
在整个3D模型中,两者基本上都能将图元信息中的尺寸、面积、坐标、颜色等要素准确表达,只是在一些细节展示方面有所差异。
如图2:在墙体、栏杆等构件方面,仿地飞行采集数据创建的3D模型更完整;定高飞行采集数据创建的3D模型有时候对模型的缺失以及真实性不够准确。

图2 构件模型对比图(左:仿地飞行;右:定高飞行)
如图3:在建筑房顶方面,仿地飞行采集数据创建的3D模型形体准确表达,轮廓清晰且正确;定高飞行采集数据创建的3D模型则有出现轮廓不清晰,线条表达不准确的问题。
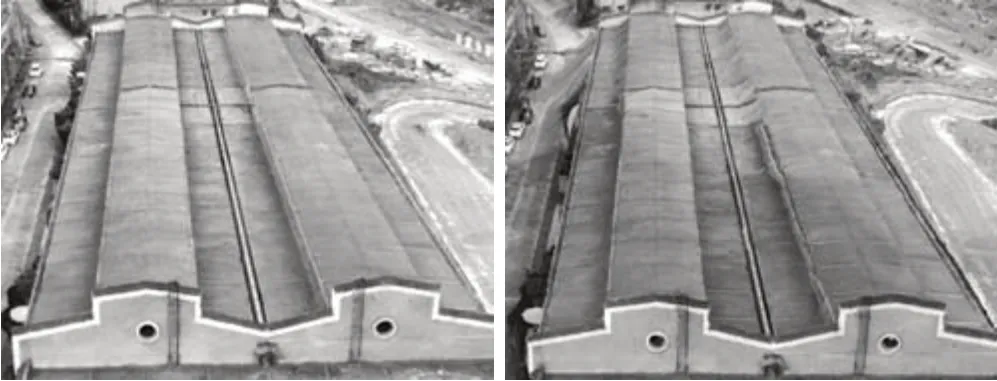
图3 房屋模型对比图(左:仿地飞行;右:定高飞行)
如图4:在文字识别方面,仿地飞行采集数据创建的3D模型更清晰,色彩对比度更高;定高飞行采集数据创建的3D模型则有出现字迹不够清晰,色彩对比度弱,色差不明显的问题。
如图5:在高差较大的山体悬崖方面,仿地飞行采集数据创建的3D模型基本上完整,偶尔出现模型漏洞,但是漏洞较少并且较小;定高飞行采集数据创建的3D 模型出现模型漏洞的数量更多,并且悬崖越陡峭,两者的质量对比差距更明显。
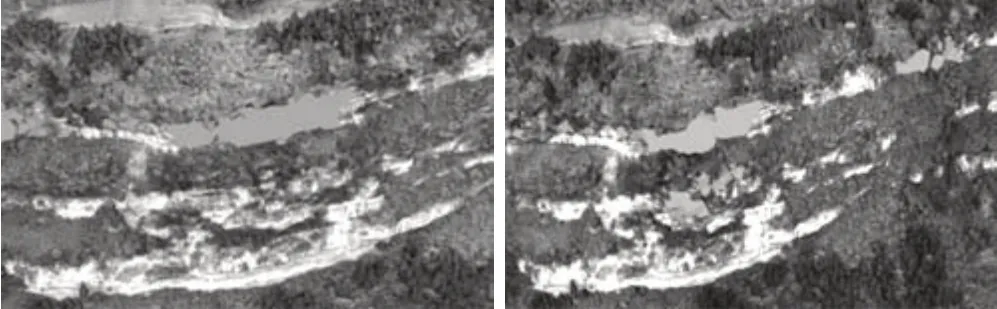
图5 悬崖模型对比图(左:仿地飞行;右:定高飞行)
5 结论
三维立体模型作为产品的一个展示和研究载体,当然是越详细越准确越好。无人机低空摄影测量的飞行方式分为了仿地飞行和定高飞行,两者采集的数据都能创建出三维模型。由于都是经过了统一的空中三角网平差处理,所以两者在精度对比方面差距不大,不过在上述的一些细节表达方面,仿地飞行由于在飞行过程中始终保持了恒定的影像分辨率,所以用其创建的三维模型更加精细,更易于识别,更能满足人们对于高质量工程的设计研究和展示需求。