小型树苗扦插机的设计*
2023-11-03王迎辉孙浩然解华臻卢振生
王迎辉 ,孙浩然 ,解华臻 ,张 岩 ,卢振生
(绥化学院,黑龙江 绥化 152061)
0 引言
2020年7月21 日,联合国粮农组织发布的《2020年全球森林资源评估》报告显示,全球森林面积持续减少,自1990年以来,全球森林面积持续缩小,净损失达1.78亿hm2;但与此同时,一些国家通过造林和森林自然扩张不断增加森林面积,近10年来我国森林面积增长率位居全球第一[1]。我国是世界上荒漠化面积最大、受影响人口最多、风沙危害最严重的国家之一。《2022年中国国土绿化状况公报》显示,目前,我国森林面积2.31亿hm2,森林覆盖率达24.02%。2022年全年完成人工造林120万hm2[2]。近年来,我国推出了植树造林、防风治沙、退耕还林等一系列政策,坚持治山、治水、治沙相配套,封山、育林、育草相结合,禁牧、休牧、轮牧相统一,积极推进荒漠化、石漠化防治[3]。而植树造林、种草恢复植被是防治荒漠化的最有效手段。
我国为了治理土地荒漠化耗费了大量人力,工作环境十分恶劣,提高机械化种植水平是降低劳动力成本的重要手段。随着当今机械自动化技术的不断发展,其他各项技术也得到了完善,但在植树机械领域,仍存在造价昂贵、操作复杂、负载较大等缺点。课题组旨在设计一种成本低、可代替人工的小型树苗扦插机样机,该装置能够实现储存、进给、扦插树苗等一系列功能,提高植树作业效率。
1 扦插机结构设计
1.1 总体结构设计
扦插机主要由储苗盒、齿轮齿条、曲柄滑块、落苗筒、底盘板块、步进电机等组成,通过SolidWorks绘制扦插机的各个零部件,并对其进行建模及装配,便携式扦插机三维模型如图1所示。

图1 便携式扦插机三维模型
根据预期功能初步拟定工作过程为:接通电源,初始化完成后,给传动机构提供动力使得顶部运动机构中的储苗盒沿苗盒轴线方向移动一个苗筒的距离;苗筒中的树苗借助重力下落到落苗机构,由扦插机构进行扦插工作;按压块将树苗压入土中,完成树苗扦插;人工操纵控制器整车移动到下一扦插位置,进行下一次扦插作业,其架构逻辑如图2所示。

图2 架构逻辑图
1.2 主要部件设计
1.2.1 顶部运动机构
储苗盒是装载树苗的主要零件,储苗盒的设计需要考虑如下因素:1)避免树苗在运输过程中受到损伤;2)方便树苗的种植;3)保证树苗的成活率。基于以上考虑,顶部苗盒具体结构如图3所示。

图3 顶部运动机构图
1.2.2 落苗机构
落苗机构结构如图4所示,直筒式扦插装置由直筒和斜筒相贯而成,树苗从储苗盒落入斜筒中,经过倾斜通道到达直筒;直筒上方设置按压块,工作时按压块上下往复运动,实现扦插树苗的重复工作。考虑到树苗下落的通畅性,结合树苗的形状尺寸,对此部分进行运动学分析,对直筒与斜筒相贯时的轴线夹角进行设定,设定此夹角为12°。直筒中间有一通槽,为了使落苗机构与扦插机构联动且互不干涉,此槽的长度为330 mm,宽度为10 mm。斜筒内壁均匀涂抹润滑油,摩擦阻力忽略不计,故树苗可以实现下落[4]。
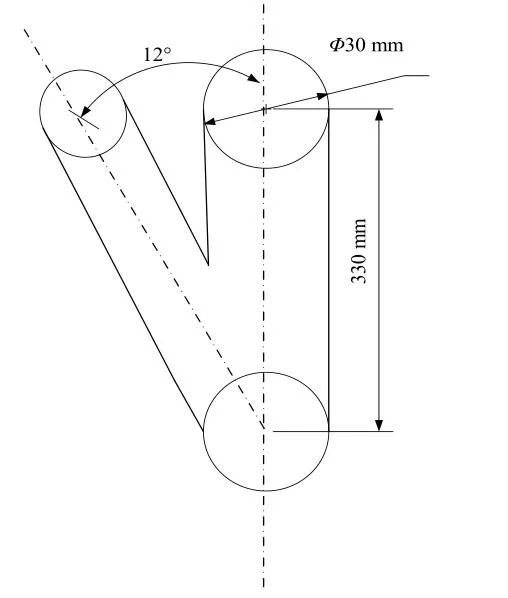
图4 落苗机构结构图
1.2.3 传动机构
传动部分采用齿轮传动和齿轮齿条传动机构,传动末尾齿条机构与储苗盒连接运动,通过PLC一体机对步进电机编程,最终实现储苗盒间歇运动[5]。齿轮传动机构三维模型如图5所示。

图5 齿轮传动机构结构图
电机轴与中间传动轴之间的轴距A1=60 mm,中间传动轴与工作轴中心距A2=80 mm,参考齿轮的选型设计,计算所需齿轮参数。
输出齿轮周长计算公式为:
式中,d为输出齿轮直径,mm;m为模数,取2 mm;z为齿数,取20齿。
储苗盒运动一个周期,与工作齿轮啮合的齿条移动8个齿,工作齿轮转动角度α为:
工作一次,储苗盒的运动距离为:
西方国家企业早已将财务管理提高到战略地位。同时,他们还开发了平衡计分卡、战略地图等辅助财务分析工具。虽然近年来,我国经济的快速发展,无论是管理能力和管理要求都有了很大的提高,我国的企业也采用了平衡计分卡的财务分析工具不断提升内部管理水平和管理效率,逐步实现精细化管理模式。但大多数企业仍然停留在基层财务管理,以企业内部业务为中心,整体管理水平还比较低。在“互联网+”发展背景下,社会经济呈现信息的复杂局而,因此,企业需要不断加强财务理念的组织创新和管理。
式中,α为工作齿轮的转动角度,取72°;C为输入齿轮周长,取251.2 mm。
1.2.4 扦插机构
扦插机构由曲柄滑块机构组成,如图6所示,曲柄滑块机构是扦插系统的关键部分,能够利用连杆实现较复杂的运动规律和运动轨迹,以实现远距离控制。为了能够配合落苗机构,用到了曲柄、连杆、按压块,将曲柄的旋转运动转化为按压块的直线往复运动,按压块向下按压树苗,实现了扦插的功能。
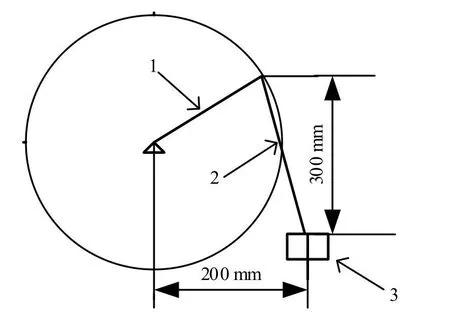
图6 曲柄滑块机构简图
根据实际设计要求,应尽可能地使按压块下落较快,使小树苗深入土壤,保证扦插任务的完成。结合落苗机构中的苗筒尺寸考虑,按压块所在最高点与最低点两个极位之间距离为300 mm,故按压块走过的行程H为300 mm。结合扦插机底盘尺寸考虑,曲柄轴心与按压块中心的垂直距离为200 mm.
因设计要求,曲柄滑块机构具有急回特性,而行程速比系数K越大,急回特性越显著,所以取K=1.5。极位夹角θ的计算公式为:
采用解析法[6]计算曲柄长度A与连杆长度B:
式中,H为行程,取300 mm;e为偏距,取200 mm;θ为极位夹角,计算得θ为36°。
2 控制系统设计
2.1 总体控制方案
控制器传递信号给STM32从而驱动直流电机实现底盘的移动,STM32反馈信号给PLC一体机,控制两个步进驱动器分别调节储苗盒电机和曲柄电机,施加植树命令即可实现装置自动扦插和移动的操作[7]。控制系统原理流程图如图7所示。
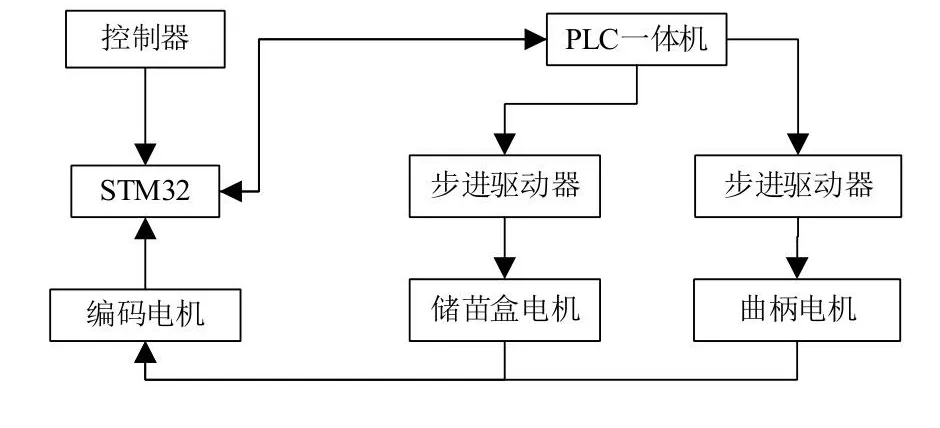
图7 控制系统原理流程图
2.2 底盘系统工作原理
底盘运动的控制与实现是通过上位机与下位机通信来实现的,即控制器(PS2无线手柄)与STM32单片机之间的通信,先通过控制器向STM32发送指令,STM32再根据所接收的信息控制电机转速来使底盘运动,通过改变底盘的目标速度来实现控制。目标速度经过运动学分析函数得出每个电机的实际输出,最后通过PID速度控制函数来实现电机的速度控制[8],底盘驱动控制程序流程图如图8所示。

图8 底盘驱动控制程序流程图
2.3 储苗机构和扦插机构系统工作流程
接通扦插机电源,储苗机构和扦插机构分别进行初始化。苗盒电机反转,使储苗盒向后移动,接触到原点接近开关后,苗盒电机停止转动,储苗盒处于原点位置。此过程中,曲柄电机也同步转动,当接近开关感应到连杆转动到初始位置时,曲柄电机停止转动,此时的按压块处于初始位置,整个初始化过程完成。通过控制器对STM32发送工作指令,苗盒电机转动,使苗盒进给相应的位移,曲柄电机转动一周,通过按压块对树苗施加压力,使树苗插入土中,完成扦插动作[9-10]。通过储苗盒是否接触终点接近开关来间接检测储苗盒是否有残余树苗,有残余树苗时会处于等待工作指令的状态,没有树苗则进行初始化过程。控制系统程序流程图如图9所示。

图9 控制系统程序流程图
3 结论
本研究以扦插机为主题,基于国内环境及土地荒漠化现状,依据机械设计和相关理论设计了一种树苗扦插机样机,得出了相关创新研究结论,具体如下:
1)储苗盒选择由若干个小格子组装而成的长方体结构较为合理;
2)落苗机构设计为两个筒组合相贯而成的结构,可实现树苗顺利下落;
3)进给传动机构研发采用齿轮、齿条传动方案,可实现储苗盒沿水平直线方向移动;
4)扦插机构研发采用曲柄滑块机构,可实现自动化扦插。
