根茎类中药收割机的设计与研究*
2023-11-03张永军李凌鹏敖淑楠郭海军
张永军 ,柳 晨 ,李凌鹏 ,敖淑楠 ,郭海军
(兰州石化职业技术大学,甘肃 兰州 730000)
中药材具有药理作用温和、成分健康等特征,在预防慢性疾病方面有明显效果,甚至在整个医药学领域中占有至关重要的地位。随着中药材的药品价值被专业人员所证实,国内对中药材产品的需求量呈现逐年递增的趋势。据相关部门统计,2019年甘肃省中药材种植面积465万亩、产量130万t,已经成为我国北方中药材主要集散地之一。但值得注意的是,随着中药材种植范围的进一步拓展,对中药材收割机械设备性能提出了更高的要求。由于很多中药材根部较为发达,主要生长在土壤深层位置,为了提高药材根茎的完整性,要合理控制挖掘深度,保证挖掘深度高于药材根深。而且,在挖掘中会出现大量杂草根茎和根茎混凝土,所以挖掘铲不仅要具备较强的入土性能,还要拥有破碎分离功能,避免出现土壤拥堵现象。针对上述问题,工作人员要全面分析根茎类中药材生长环境和生理特征,设计出振动式挖掘装置,在确保药材根茎完整性的基础上,合理控制挖掘阻力,全面提升碎土效果,降低机械能耗[1]。
1 挖掘装置工作原理
挖掘装置结构主要包括摆杆、挖掘铲支撑架、减速器、牵引架、挖掘铲等结构,如图1所示。挖掘装置通常设置在整个设备的最前端,利用拖挂架连接牵引车,在减速机的输出轴上分别设置摆杆连接机架和挖铲支座,并在带轮上安装偏心轮,以确保挖铲支座与偏心轮的相互连接。掘进装置正常运转时,通过牵引车动力输出轴输出动力,通过减速机后,引导皮带轮运转,并在皮带轮引导下转动皮带轮上的偏心轮,使挖掘铲进行平面运动,并随牵引车前进工作,自主切割挖土。
图1 挖掘装置结构示意图
2 挖掘铲设计
2.1 挖掘铲结构设计
站在运动形式的角度分析,挖掘铲主要包括振动式挖掘铲和固定式挖掘铲;从形状方面分析,挖掘铲主要分为平面三角挖掘铲和栅条挖掘铲,通常来说栅条挖掘铲以振动式为主,平面三角挖掘铲是固定式。振动式栅条挖掘铲破碎分离效果较强,能避免挖掘过程出现拥堵问题,但其挖掘深度较浅,入土性能较差,在工作中时常出现挖断问题。而固定式三角挖掘铲具有较强的入土性能,挖掘深度远大于药材根部长度,但其破碎能力较弱,铲面容易附着大量茎土混合物,从而产生严重的拥堵问题[2]。
通过分析,发现挖掘铲主要包括尾部U形导杆、铲刃、铲体等,其中,其铲刃整体为锯齿形,由很多小型三角铲组成,依次固定在铲体上。在铲体后部设置U形导杆,不同导杆间距基本相同,工作中通过四杆机构带动整体挖掘装置运行,运动形式为振动式,能有效控制挖掘阻力,有利于挖掘机挖掘到更深的土壤,拓展和土壤的接触面积,全面提高其碎土能力,挖掘出大量茎土混合物。在U形导杆和铲面振动作用下,将土壤运输到地面,将药材根茎传输到分离装置中,保证初次分离操作流程顺利进行。
2.2 挖掘铲数据确定
2.2.1 铲刃张角
在采收药材的过程中,为了避免收割机上缠绕大量杂草根茎,造成刀刃存在安全隐患[3]。抢收时,工作人员要采取滑行切割的方式进行抢收。
挖掘铲铲刃受力分析如图2所示,其中,R0表示铲刃承受的茎土混合物压力;E表示挖掘铲上的点位;P0表示铲刃所承受的挖掘阻力值;F0表示铲刃和茎土混合物的相互摩擦力。
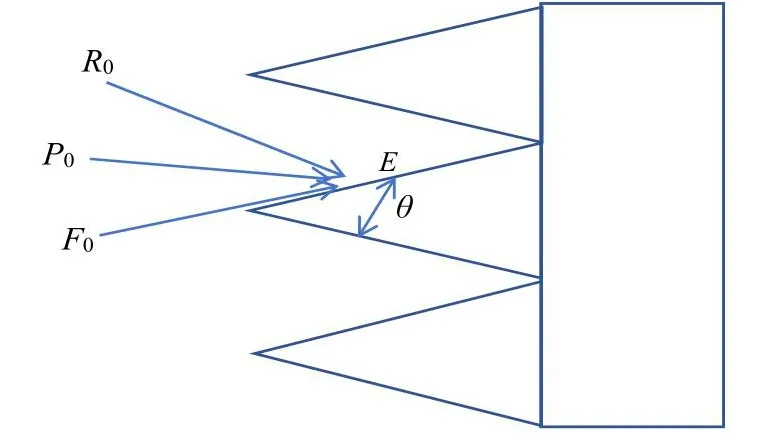
图2 挖掘铲铲刃受力分析
因此,在应用滑切方式进行挖掘时,要满足如下要求:
分析上图,得到如下公式:
查阅相关试验数据可知,合理控制铲刃张角对提高机械设备工作性能有重要作用,如果铲刃张角过大,根本无法切割杂草根茎,会堵塞挖掘铲;如果铲刃张角较小,想要达到预期的挖掘宽度,就要拓展铲刃宽度,增加挖掘铲的挖掘阻力。通过公式(2),可知挖掘铲铲刃张角应小于94°。
2.2.2 入土角
挖掘铲入土角和挖掘铲入土性能、挖掘深度有直接关联。为了满足预期的挖掘效果,使挖掘过程对药材所产生的影响最小,挖掘铲在工作中要合理控制入土角度,完整挖掘药材根茎,保证掘出物在铲面上进行均匀运动,保证其能顺利传输到挖掘铲后侧,避免其掉落,全面分析茎土混凝土的受力情况。根据入土角理论知识,工作人员要通过平衡方程,计算出挖掘铲运动作用力。
试验显示:入土角和挖掘深度成正比,入土角越小,挖掘深度下降,挖掘阻力降低,随着入土性能的增强,会降低其碎土性能,甚至出现堵塞现象;相反,入土角越大,挖掘深度增加,挖掘阻力增加,降低入土性能,会增加其碎土性能。目前,入土角通常控制在25°。
2.2.3 工作深度
工作人员在利用人工挖掘技术后,要全面分析根茎类中药材根茎实际分布情况,计算得到药材根茎分布范围控制在200 mm~500 mm之间,且药材根须相互结合。因此,在收割过程中,工作人员要保证挖掘深度超过药材根茎最大深度,避免切断主根,给根茎的整体性带来严重影响,降低药材的药用价值,故挖掘铲最大入土深度应大于500 mm[4]。
2.2.4 工作长度
目前,挖掘铲长度是由前端环节和后端环节组成的,其中,前端环节为挖掘铲刃部的铲体环节,主要作用是挖药材根茎,后端环节主要是U形导杆,通常用来运输茎土混合物,保证沿铲面向后输送茎土混凝土。用能量守恒定律来计算后端长度:
计算得出:L1=380 mm,挖掘铲总长度L=L1+L2=772 mm
3 行走执行机构设计
药材收获机的行走执行机构主要分为履带式和轮式两种,其中,在大型药材收获机上广泛使用的是轮式行走机构,其特点是速度快;履带式行走机构一般适用于中小型药材收割机,其特点是转弯半径小、灵活性高。同时,行走模块主要作用是采集收割机的转动速度和直线速度,包括机械液态控制元件和履带底盘,通过控制推杆和方向盘两个环节,对液压阀开关进行调节,确保两驱动轮转速达到药材收割机的使用需求[5]。
4 挖掘装置运动学仿真
4.1 建立仿真模型
通过ADAMS软件仿真振动式挖掘铲,构建健全的三维实体模型图,将其应用到软件方面,完善直角坐标体系,规范X轴运动方向。同时,根据收割机工作中减速器运行的轴转速,将相同数据的转速马达应用到驱动挖掘铲运动偏心轮,将其转速控制为300 r/min,旋转方向为顺时针旋转,仿真时间控制在5 s左右,仅受到重力影响,重力方向垂直向下,全面分析该挖掘装置在垂直与水平方向的数据,如速度、位移、加速变化等数据情况,判断该运动特征是否能满足行业标准[6]。
4.2 仿真结果分析
通过上述仿真分析,能取得完整的挖掘铲运动分析图,在图片上选择挖掘铲铲刃上任意点,将该点作为静止状态的坐标原点,得出其在不同时间X轴方向的移动、速度、加速度变化曲线。X轴方向时间-速度变化曲线如图3所示。通过分析图中的内容发现,在没有明显运动干扰影响的X轴运动中,挖掘铲的最高运动幅度为300 mm,整体呈复式运动。同时,挖掘铲的速度和加速度曲线在X轴上波动幅度较小,说明挖掘铲运动机构具有急剧回位的特点,但这种特征要素较为模糊,工作人员要结合速度、位移、加速度曲线等特征进行分析。分析发现:在挖掘铲进行日常运动时,铲尖在原点位置,挖掘铲初始速度为250 mm/s,速度持续不变,挖掘铲向左侧进行移动,速度呈直线下降趋势[7]。当挖掘铲运动到最左侧时,挖掘铲速度下降到0,加速度最高值为130 mm/s2,挖掘铲向右侧进行移动,速度增加,加速度下降;当挖掘铲重新回到初始位置时,挖掘铲正向速度上升到250 mm/s,加速度下降到0,挖掘铲向右进行持续运动,挖掘铲运行速度降低;当挖掘铲抵达最右侧时,挖掘速度为0,加速度达到最高值,最高数值为110 mm/s2,这时挖掘铲向左侧进行移动,反向增加挖掘铲速度;当挖掘铲回归到原始点位时,速度是反向最高值250 mm/s,加速度下降到0,挖掘铲重复向左进行运动。
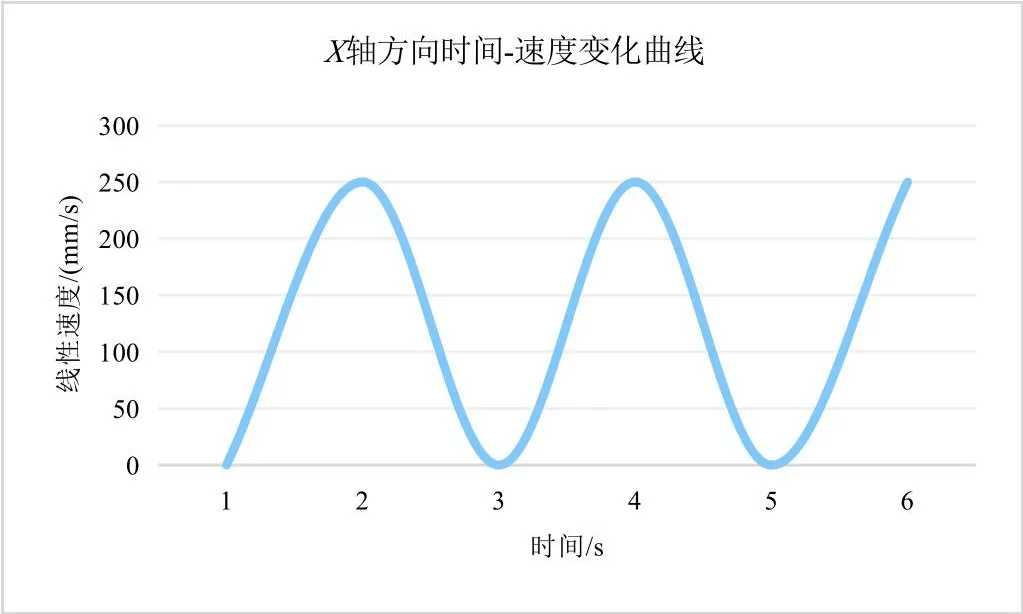
图3 X轴方向时间-速度变化曲线
同时,在挖掘铲铲面上选择任意点,将该点作为静止状态的坐标原点,得出其在不同时间Y轴方向的移动、速度、加速度变化曲线。其中,Y轴方向的时间-速度变化曲线如图4所示,可见,在没有明显运动干扰现象的Y轴上,挖掘铲的最高运动幅度为160 mm,运动轨迹曲线呈现稳定状态。并以流畅的Y轴运动速度与加速曲线相互对照,表现出较强的稳定性。结合Y轴加速度、速度、位移等因素变化,发现当挖掘铲运动时,挖掘铲最初速度是180 mm/s,加速度最高值为280 mm/s2,挖掘铲向上进行运动[8]。运动中速度和加速度下降,当挖掘铲运动到达最高点时,速度和加速度下降到0,挖掘铲向下进行运动,这时挖掘铲加速度和速度呈现反向增加趋势;当挖掘铲二次返回原点时,速度和加速度为反向最高值,速度数值为180 mm/s,加速度是280 mm/s2,促使挖掘铲向下进行持续运动,减小其速度和加速度;当挖掘铲运动到最下侧时,速度和加速度数值为0,挖掘铲向上进行运动,速度和加速度呈现正向提升趋势[9];当挖掘铲回归到原点时,速度和加速度达到正向最高值,速度为180 mm/s、加速度为280 mm/s2。
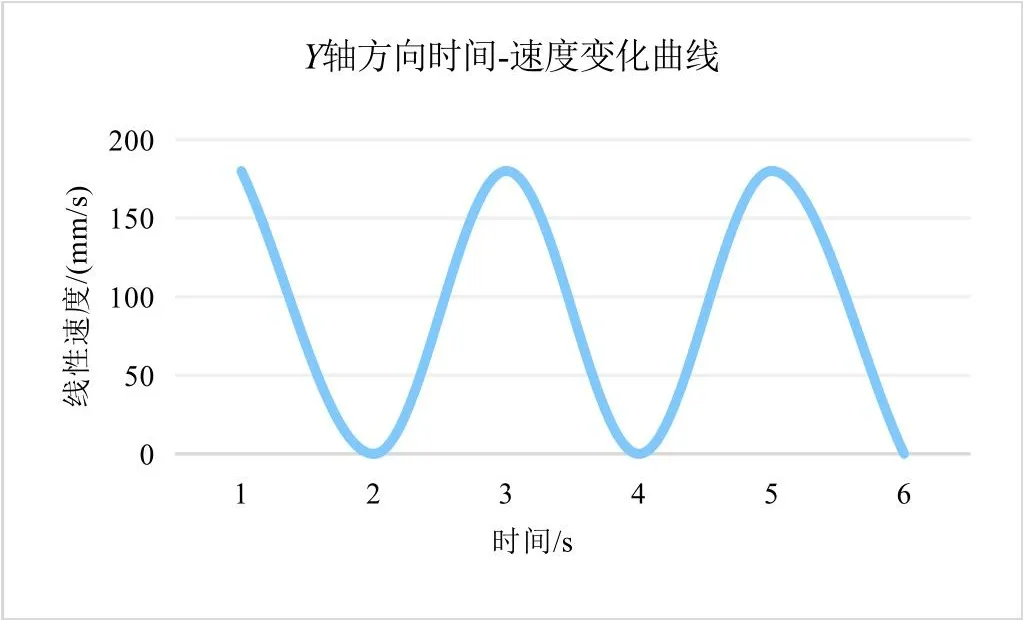
图4 Y轴方向时间-速度变化曲线
5 小结
综上所述,在使用固定式收割机收割根茎类中药材时,经常出现碎土效果差、入土阻力大、挖掘深度不足、动力损耗大等各种问题[10]。据此,对振动式挖掘装置的工作效果、运动结构、挖掘参数等数据,运用理论计算和数据模拟的方法进行综合分析。经实践证明,改良装置应用锯齿形平面三角铲,入土角度控制在20°左右,工作深度大于500 mm,铲面长度为772 mm,其水平方向运动速度趋势与余弦函数曲线基本相同,垂直方向属于正弦函数曲线,其运动结构采用四连杆式结构,便于进行平面运行操作。
