基于FANUC Mate 200iD工业机器人工作站的智能工具库系统设计
2023-11-02韩宇严成武郭付龙杨波
韩宇,严成武,郭付龙,杨波
基于FANUC Mate 200iD工业机器人工作站的智能工具库系统设计
韩宇,严成武,郭付龙,杨波
(深圳技师学院 中德智造学院,广东 深圳 518000)
以FANUC Mate 200iD工业机器人工作站为基础,开发了一套工业机器人用智能工具库系统。介绍了该智能工具库系统的总体方案与工作原理,其机械装置设计主要包括总体结构设计与末端执行器(工具)定位,控制系统设计包括系统通讯设计与程序设计。完成了整个智能工具库系统的安装与调试。该智能工具库系统能够在PLC的控制下转动工位并实现准确定位。为工业机器人准备好放置工具的位置,将工业机器人需要的末端执行器旋转至更换位,工业机器人运动并完成末端执行器的智能化快速更换,提升整个工作站的工作效率。
FANUC;工业机器人;智能工具库
随着技术的发展,工业机器人的应用场合越来越广泛,以工业机器人为主要设备的工作站应运而生。工业机器人工作站中往往包含了多种工序,由于工业机器人的末端执行器(即工具)的互换性较差,因此工业机器人在完成不同工序时,通常需要更换不同的末端执行器,为此,每个工作站上需要准备多套末端执行器。工业机器人每完成一道工序,则需要更换下一道工序所用的末端执行器。为实现快速更换末端执行的目的,通常采用在工业机器人末端轴与末端执行器之间安装气动快换机构的方法。工业机器人工作站中,末端执行器为分散放置,不仅占用工作站的有限空间,而且在编写工业机器人工作程序时,每一个末端执行器都需要示教至少两个点位,大大增加了程序编写的难度和程序的长度,并导致后期工业机器人运行时需要更多的时间来完成末端执行器的更换,降低了工作站的生产效率。为解决上述问题,设计一套工业机器人用智能工具库系统具有十分重要的意义。
目前,国内外关于工业机器人智能工具库的研究较少,常见工具库只有简单的放置功能,不具备智能化更换的作用。崔华飞等[1-2]采用Arduino开发平台,开发出基于视觉的Sawyer机器人的智能化快换工具库,但该快换工具库造价昂贵,不利于大范围推广。为此,本文设计一套以PLC(Programmable Logic Controller,可编程逻辑控制器)为控制单元的智能工具库系统,为工业机器人系统集成提供技术参考。
1 系统总体方案
1.1 系统组成
本文设计的工业机器人智能工具库系统以FANUC Mate 200iD工业机器人工作站为基础,由工业机器人本体、工作站外围设备、I/O模块、PLC、步进电机、智能工具库机械装置、传感器等组成。总体方案如图1所示。
在该工业机器人智能工具库系统中,工业机器人通过I/O模块与控制单元PLC交换信息,PLC根据工业机器人的指令控制智能工具库机械装置自动运行,实现智能化更换末端执行器的设计意图。
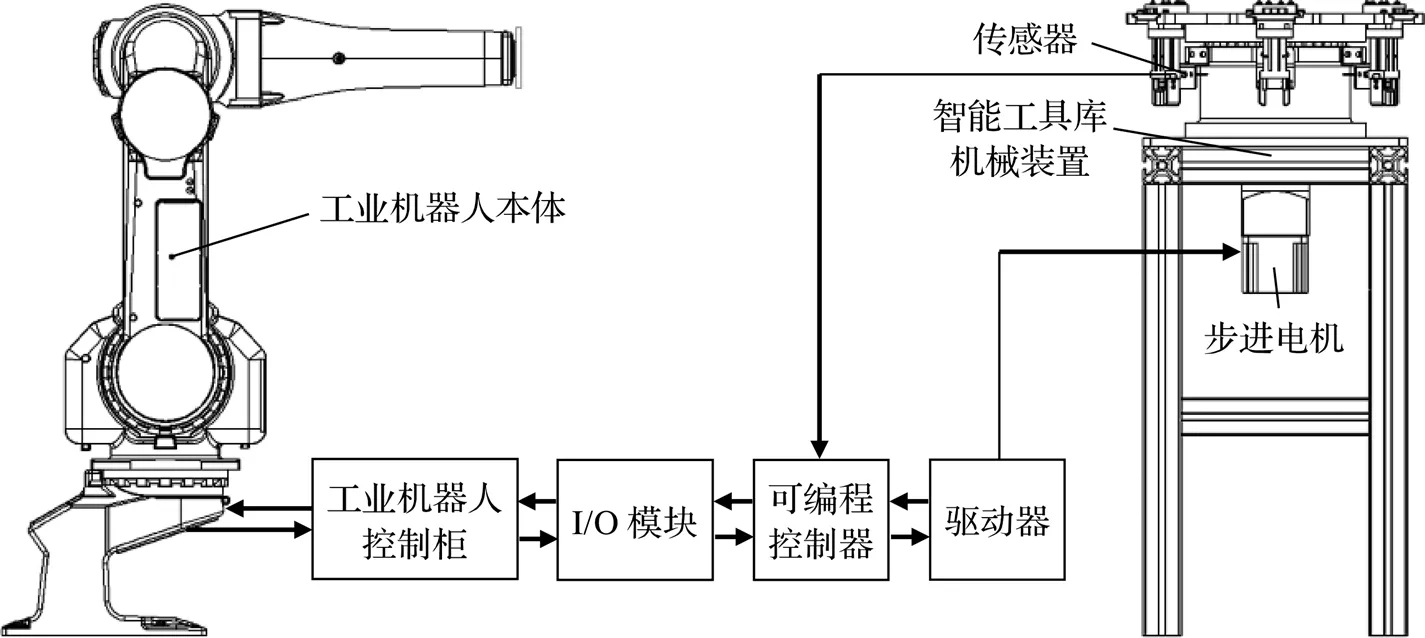
图1 工业机器人智能工具库系统总体方案
1.2 系统工作原理
该工业机器人智能工具库系统的设计采用了计算机通讯技术、电器及自动化控制技术、机械设计与制造技术、传感器技术等[3-6]。其工作流程如图2所示。当工业机器人运行程序,发出放置或抓取末端执行器指令时,工业机器人系统通过I/O模块对外发出请求信号,智能工具库系统控制单元PLC收到请求信号后,运行梯形图程序,驱动步进电机旋转。智能工具库机械装置在步进电机的驱动下旋转,当PLC收到回零传感器信号后,机械装置停止旋转,完成智能工具库回零动作。接着,PLC依据收到的请求信号(不同的工具放置位对应不同的信号),驱动步进电机旋转,带动智能工具库机械装置旋转至所需的工具放置位/抓取位。PLC输出工具放置位/抓取位到位信号,工业机器人收到到位信号后运行程序,运动到智能工具库机械装置工具放置位/抓取位上方,对准其所需工位,通过气动快换装置放置或抓取工具,完成放置/抓取末端执行器工作。
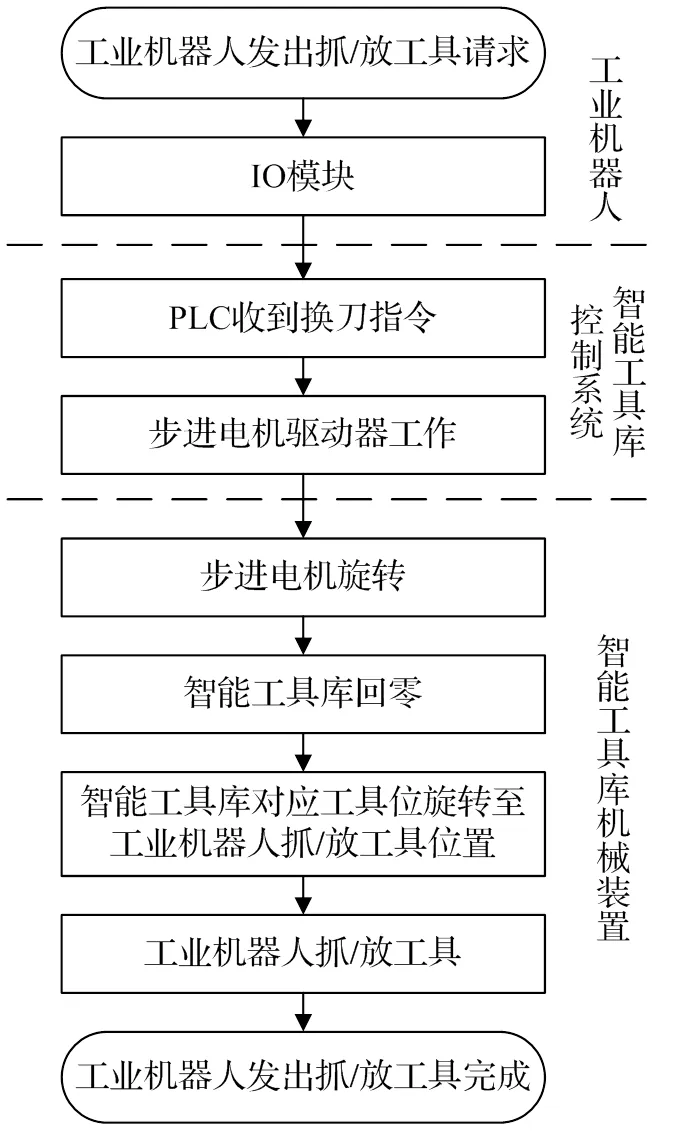
图2 工业机器人智能工具库系统工作流程
上述工作流程中,工业机器人只需示教定位两个较为准确的工作点位,即取放置/抓取末端执行器和等待放置/抓取末端执行器两个精准点位,大大简化示教编程的难度,有效减少程序的长度,同时提高工业机器人的工作效率。
2 智能工具库机械装置设计
智能工具库机械装置是整个智能工具库系统的重要硬件组成,是放置工业机器人工具的硬件平台。按照整个工业机器人智能工具库系统的功能要求,智能工具库机械装置应具备旋转和精准定位功能,能够放置若干个工业机器人工具。
2.1 智能工具库机械装置总体结构
如图3所示,工业机器人智能工具库系统机械装置上有6个工具放置位,呈360°均匀分布,可以同时放置6个不同种类的末端执行器(工具)。智能工具库机械装置主要由步进电机、减速机、联轴器、电机固定箱体、推力轴承、挂装板等组成。工业机器人末端执行器通过定位销和定位面放置在挂装板上,以使各个工位旋转到位后气动快换法兰盘的重复定位精度满足更换要求。
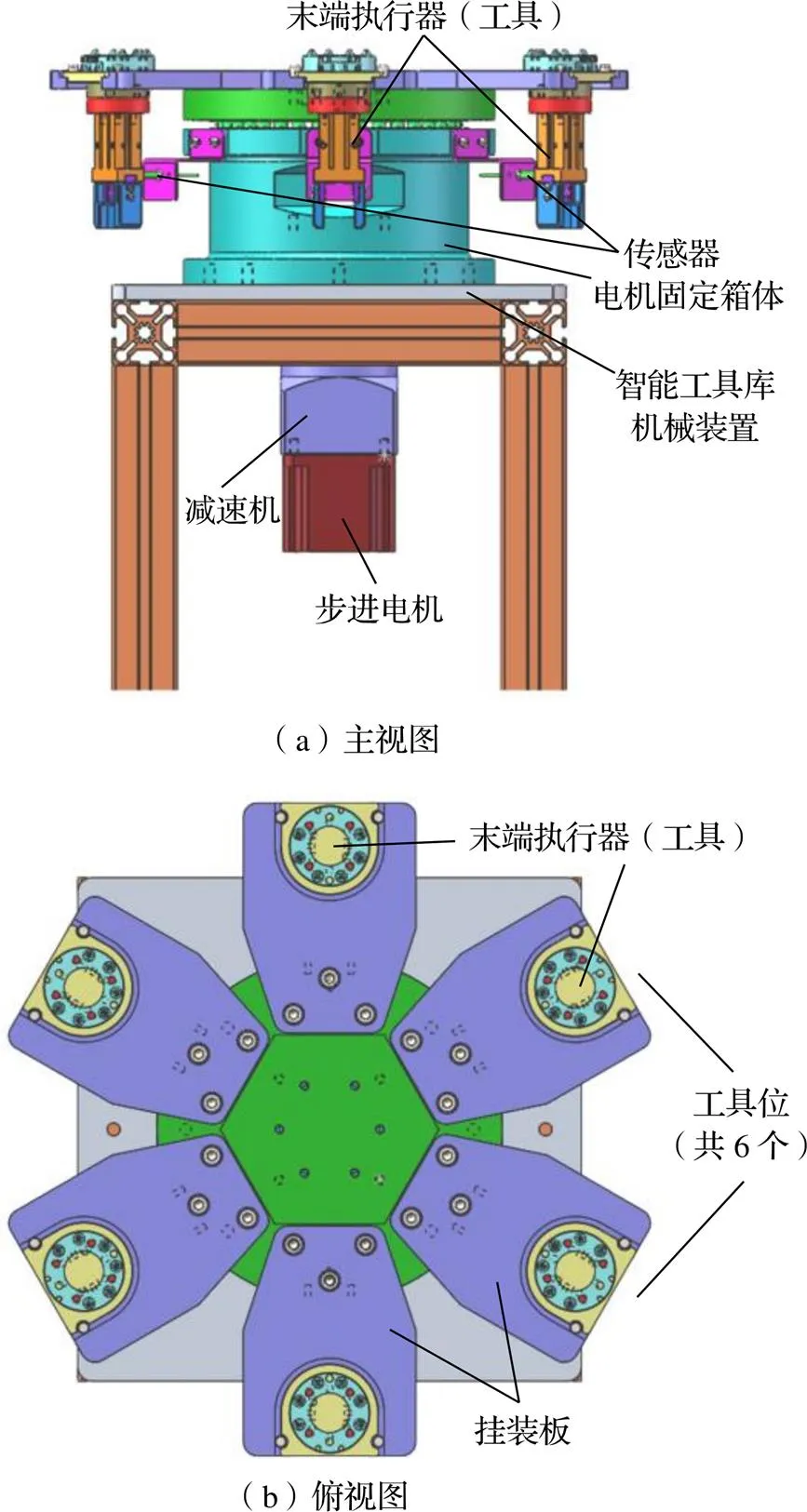
图3 智能工具库系统机械装置结构
工业机器人智能工具库系统机械装置采用SolidWorks 2019软件设计。整个装置传动链结构简单,采用步进电机加精密行星减速机直接驱动的方式,驱动智能工具库旋转部分组件旋转,从而实现不同工具位的旋转换位[7]。使用的精密行星减速机和步进电机均为台湾峰桦科技有限公司生产。其中,精密行星减速机结构为二级传递,减速比16,传动效率94%;步进电机为ABCH280-4C60S型号的二相开环步进电机,额定扭矩4.5 N·m,转动惯量1800 g·cm2。
2.2 末端执行器(工具)定位
智能工具库系统工作时,由于工业机器人抓取或放置末端执行器的位置是固定的,而智能工具库有6个工位,为保证智能工具库系统每个工位都能精准对接工业机器人放置或抓取末端执行器示教点,需要对智能工具库系统中工具放置位进行精准定位。
智能工具库系统中,采用PLC、步进电机、精密减速机、传感器构成闭环控制的方式实现周向定位[8-9]。当智能工具库旋转时,PLC收到传感器的到位信号后,迅速控制步进电机实现精准停止,从而实现周向定位。
为保证智能工具库系统能够正常工作,除了周向定位,还需保证末端执行器在每个工位中的精准定位。如图4所示,工业机器人末端执行器(工具)的定位面分为定位A面、定位B面、定位C面。在智能工具库机械装置中,每个工位的挂装板上都装配有两个圆柱定位销,并在挂装板上设计有U型定位面。工业机器人末端执行器(工具)的定位A面与挂装板的U型定位面配合,两个圆柱定位销分别与工业机器人末端执行器(工具)的定位B面和C面配合定位,从而实现工业机器人末端执行器(工具)在每个工位中的精准定位。
3 控制系统设计
3.1 系统通讯
智能工具库系统基于FANUC Mate 200iD工业机器人工作站,采用SIMATIC S7-1200 PLC为控制单元,通过工业机器人与PLC组态实现工业机器人与控制单元之间的通讯[10-11]。
工业机器人智能工具库系统调试现场如图5所示。FANUC Mate 200iD工业机器人和智能工具库通过通讯电缆连接,其中靠近工业机器人端的信号线连接在I/O接线板上,靠近智能工具库端的连接在SIMATIC S7-1200 PLC的输入/输出端子排上。
FANUC Mate 200iD工业机器人与SIMATIC S7-1200 PLC I/O配置通讯协议如表1所示。
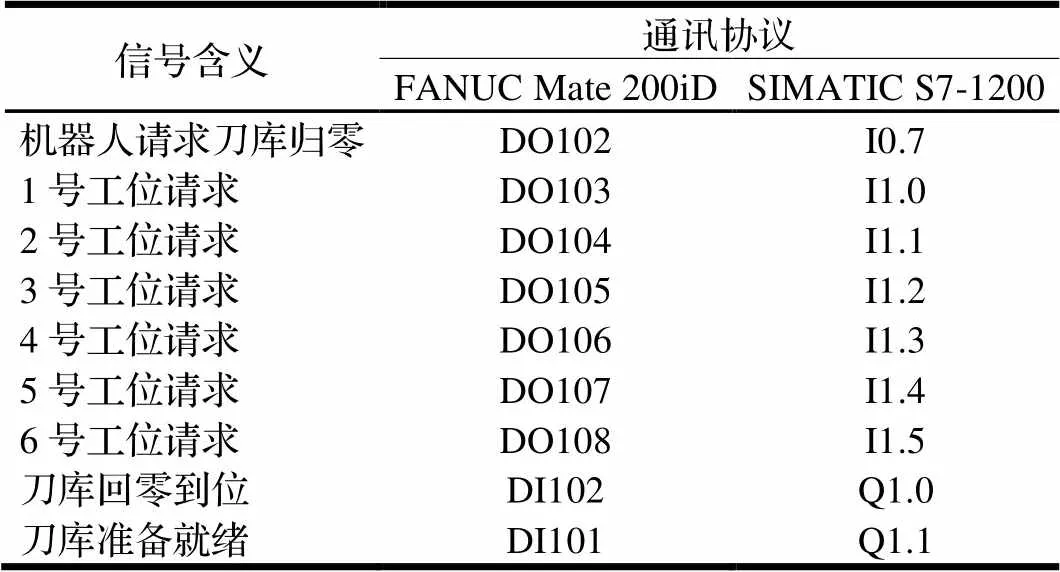
表1 工业机器人与PLC I/O配置通讯协议表
表1中,工业机器人抓取/放置的请求信号为机器人对外输出信号,1~6号工位的输出信号分别对应DO103~DO108,这6个信号与控制单元SIMATIC S7-1200 PLC的输入信号I1.0~I1.6对应;刀库回零到位信号DI102和刀库准备就绪信号DI101为FANUC Mate 200iD工业机器人输入等待信号,分别与控制单元SIMATIC S7-1200 PLC的输出信号Q1.0和Q1.1对应。
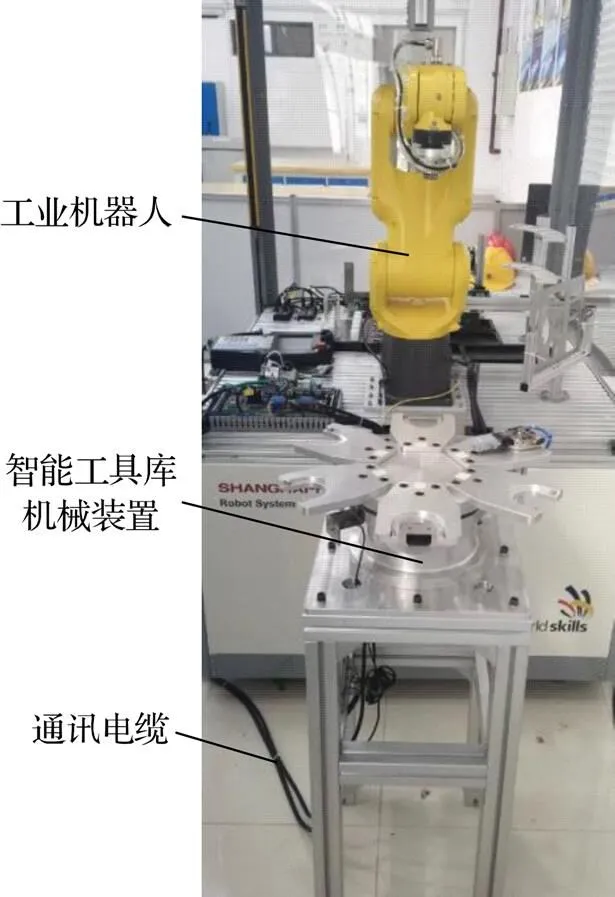
图5 智能工具库系统实物图
3.2 程序设计
程序是整个工业机器人智能工具库系统正常工作的关键要素。工业机器人智能工具库程序主要包括控制单元PLC的梯形图程序和工业机器人运行抓取或放置工具的程序[12-13],二者之间通过约定的信号地址实现信息交互,以实现整个智能库系统的智能化工作。
工业机器人智能工具库系统放置工具时,控制单元PLC的梯形图程序架构逻辑关系流程图如图6所示。控制单元PLC收到工业机器人放置工具指令后,控制智能工具库机械装置旋转至工具放置位,并输出到位信号给工业机器人[14-16],工业机器人收到到位信号后运行自身程序,完成放置工具动作。
FANUC Mate 200iD工业机器人请求抓取智能工具库6号工位工具程序为:
1:J @PR[1:HOME] 100% FINE; 机器人回HOME点;
2: DO[102:OFF] =ON ; 机器人对外输出信号102打开;
3: WAIT 2.0(sec); 等待2秒钟;
4: DO[102:OFF] =OFF ; 机器人对外输出信号102关闭;
5: WAIT 8.00(sec); 等待8秒钟;
6: DO[108:OFF] =ON ; 机器人对外输出信号108打开;
7: WAIT 2.0(sec); 等待2秒钟;
8: DO[108:OFF] =OFF ; 机器人对外输出信号108关闭;
9:J @PR[1:HOME] 100% FINE; 机器人回HOME点;
10: J P[1] 100% FINE; 机器人运动到P1点;
… …
37: J P[3] 15% FINE; 机器人运动到P3点;
38: J P[2] 100% FINE; 机器人运动到P2点;
39: J @PR[1:HOME] 100% FINE; 机器人运动到HOME点;
[End] 结束;
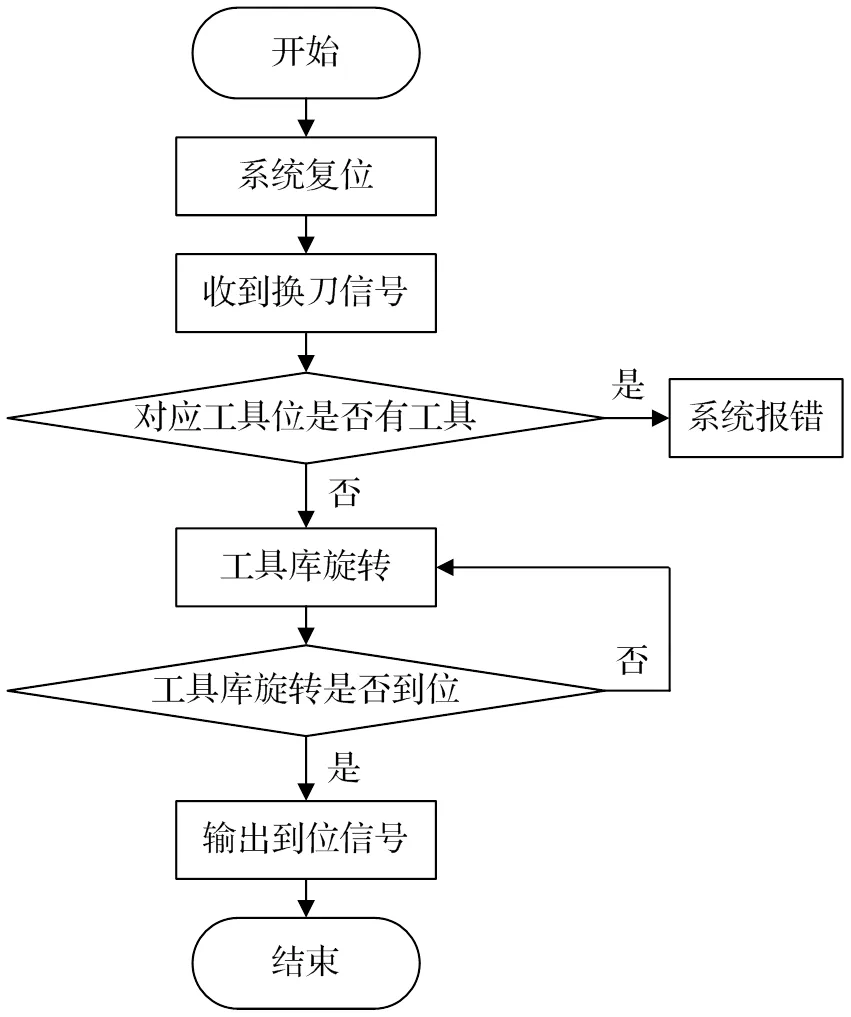
图6 智能工具库放置工具程序流程图
4 结论
为解决工业机器人工作站多种末端执行器分散放置造成使用不便的痛点,构建出一种能够实现智能化快速更换末端执行器的方法,并依据该方法,设计并搭建基于FANUC Mate 200iD工业机器人工作站的智能工具库系统。本项目以PLC为控制单元,通过I/O模块与工业机器人进行信号交互,控制智能工具库机械装置精准定位,实现工业机器人快速智能化更换末端执行器。
该工业机器人智能工具库系统稳定可靠、性价比突出,适合融入工业机器人工作站及其应用产线中。
[1]崔华飞. 基于Sawyer机器人的智能化快换工具库研究[D]. 烟台大学,2021.
[2]白蕾,张小洁,侯伟. 基于工业机器人的智能生产线设计与开发[J]. 工业仪表与自动化装置,2018(3):69-72.
[3]侯志刚,张云海,胡斌,等. 协作机器人抓握式柔性夹持器设计[J]. 现代制造工程,2021(5):47-52.
[4]候帅. 多自由度机器人搬运平台调平控制系统研究[D]. 西安:长安大学,2017.
[5]袁培江,陈冬冬,王田苗,等. 基于双目视觉测量系统的孔位补偿研究[J]. 航空制造技术,2018,61(4):41-46.
[6]张伟豪. 基于机器视觉的气门无序摆放抓取系统的研究[D]. 郑州:郑州大学,2021.
[7]王亚龙. 基于SVM标定算法的气门视觉抓取系统研究[D]. 郑州:郑州大学,2020.
[8]刘坤. 基于PLC的开放式工业机器人运动控制教学平台研究与实现[D]. 杭州:杭州电子科技大学,2022.
[9]胡艳琳. 基于PLC控制的物料检测分类放置工业机器人系统研究与设计[D]. 石家庄:河北科技大学,2020.
[10]刘彬. 基于PLC的工业搬运机器人运动控制系统研究[D]. 唐山:华北理工大学,2020.
[11]何东明. 基于机器人和PLC的玻璃磨边自动化控制系统设计[D]. 宜昌:三峡大学,2020.
[12]黄信兵,刘小娟,李春贵. 基于Profinet的切削加工单元智能化改造设计与应用[J]. 机床与液压,2022,50(10):124-128.
[13]孟静静,郝睿,王惠卿,等. 基于PLC与工业机器人的自动生产线智能包装系统设计[J]. 制造技术与机床,2021(11):63-67.
[14]周文婷,孟凡文,王海亮. 基于MODBUS-TCP协议的视觉系统、PLC与工业机器人通信设计[J]. 电子世界,2020(21):132-133,137.
[15]韩宇,何善印,郑泳洋,等. 一种工业机器人的智能工具库系统:CN115284334A[P]. 2022-11-04.
[16]王哲禄. 基于PLC与工业机器人的抛光打磨工作站控制系统的设计与实现[J]. 制造业自动化,2019,41(7):103-105,147.
Design of Intelligent Tool Library System Based on FANUC Mate 200iD Industrial Robot Workstation
HAN Yu,YAN Chengwu,GUO Fulong,YANG Bo
(Sino-German College of Intelligent Manufacturing, Shenzhen Institute of Technology, Shenzhen 518000, China )
Based on the FANUC Mate 200iD industrial robot workstation, this paper studies and develops an intelligent tool library system for industrial robots. The overall scheme and working principle of the intelligent tool library system were introduced. The mechanical device design mainly includes the overall structure design and end effector (tool) positioning, while the control system design includes system communication design and program design. The installation and debugging of the entire intelligent tool library system has been completed. The system can rotate the station and achieve accurate positioning under the control of PLC, prepare the position for the industrial robot to place tools, and rotate the required end actuator to the replacement position. Industrial robots move and complete the intelligent and rapid replacement of the end actuator, and the working efficiency of the entire work station has been improved.
FANUC;industrial robot;intelligent tool library
TP242.2
A
10.3969/j.issn.1006-0316.2023.10.013
1006-0316 (2023) 10-0075-06
2023-02-13
深圳技师学院校级科研项目——工业机器人智能工具库关键技术研究(2211016)
韩宇(1985-),男,河南南阳人,硕士,高级工程师,主要研究方向为数控技术、工业机器人技术等,E-mail:925060536@qq.com。