一种高精度船只目标光电定位系统设计与实现
2023-11-02李英杰李绍军卢嘉成梁冬冬
李英杰,李绍军,蒋 鹏,卢嘉成,陈 力,梁冬冬,周 磊
一种高精度船只目标光电定位系统设计与实现
李英杰1,李绍军1,蒋 鹏2,卢嘉成2,陈 力1,梁冬冬1,周 磊1
(1. 北方信息控制研究院集团有限公司,江苏 南京 210000;2. 驻南京地区第三军事代表室,江苏 南京 210000)
针对跨海桥梁或沿海机场等场所需要实时测算获取移动船只目标绝对位置和高程的现实需要,文中介绍一种高精度光电船只目标定位系统设计与实现方案。通过将高清高精度光学探测组件集成于高精度云台设备内部,可实时解算出目标点的绝对位置信息和高程信息并上报监控系统。结合雷达系统引导可实现无人值守情况下自动测算过往船只经纬度坐标及高程功能。经实际运行测试,该系统展现出良好的可靠性,具有较好的测量精度和应用前景。
光学探测组件;云台;无人值守;自动测算;经纬度坐标;高程
0 引言
在沿海机场往往会面临机场跑道方向上时有货轮经过附近海域或大型海上平台在航线方向海上作业影响飞机起飞降安全的情况,由于机场位于开阔水域,往来船舶等频繁,发生跑道入侵事件的风险很大[1];在内陆江河或沿海航道上同样会面临过往船只过高对跨江或跨海大桥产生安全威胁的情况,需要预防桥梁受到船舶撞击[2]。为此这些地方往往需要对过往船只的高度乃至位置进行监测,实时掌握目标航向和目标高度以便评估其威胁程度。
在船舶移动的过程中由于多普勒效应影响,同时雷达引导上传目标数据周期性长、实时性差,单纯的雷达探测只能获取滞后的目标绝对位置信息,不可避免会产生一定的误差[3-4],无法掌握目标准确的高度,且随着水位的涨落,同一型船只在不同的时间经过同一位置也难以保证船只最高点的高程保持不变,为此需要一种高精度目标定位系统能够实时解算出目标的绝对位置和高程信息。
为此,本文设计了一种集成有高清可见光相机、红外热像仪、高精度激光测距机、倾角仪、光电编码器于一体的光电船只目标定位系统。
1 测量原理
光电船只目标定位系统安装于陆地基座上,依靠内部集成的高清可见光相机、红外热像仪及激光测距机可实现昼夜对目标船只位置和高程信息的监测,下文图中云台均以PTZ代表,系统工作示意图如图1所示。
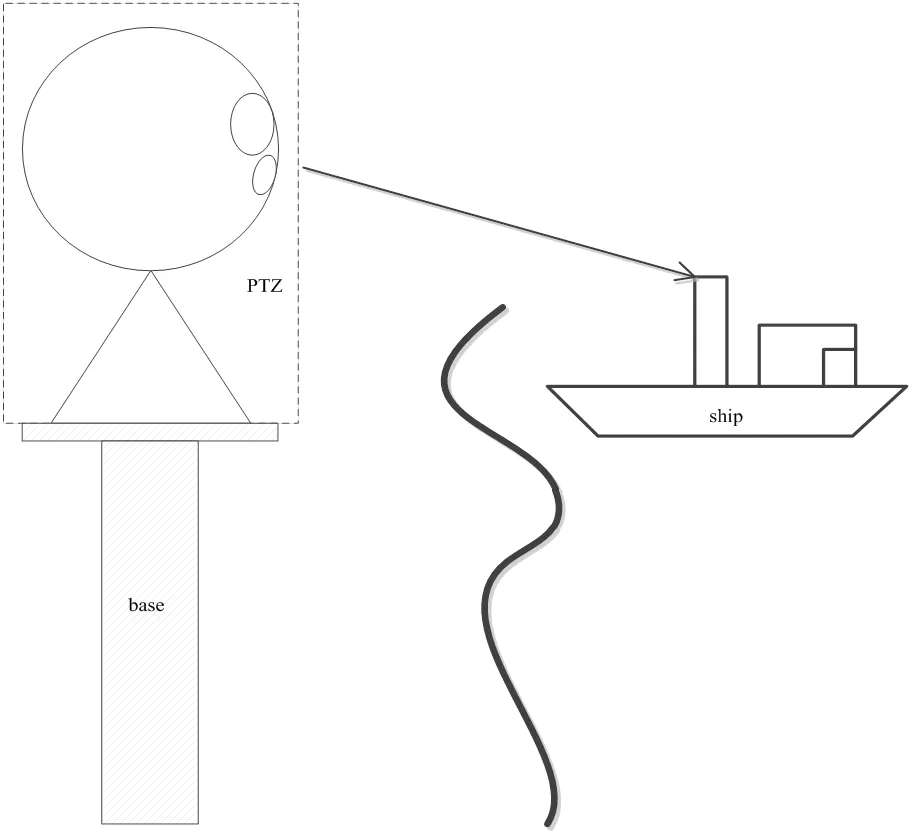
图1 目标定位系统示意
通过北斗定位装置获取云台自身的经纬度高程坐标信息(本文中经纬度高程坐标信息均基于2000国家大地坐标系),通过激光测距机和云台编码器获取目标相对于云台的相对坐标信息,通过倾角仪获取云台安装基座姿态变化信息以对目标解算位置进行实时修正。以上信息经云台内部目标定位解算模块解算,给出目标的绝对位置信息,如图2所示。
由于系统设备安装方式为陆基安装,故只需在系统安装完毕后,利用北斗定位装置对光电系统安装位置进行一次自身坐标位置标定,以获取光电系统的经纬度坐标和高程信息。同时利用云台内部的水平向和高低向光电编码器获取目标相对于云台的角度信息,通过激光测距机获取目标相对于云台的测量距离,由此可解算出目标对于光电系统的相对位置和高程信息,再结合光电系统自身的大地坐标位置即可解算出目标的绝对位置和高程信息,目标与云台坐标系关系如图3所示。
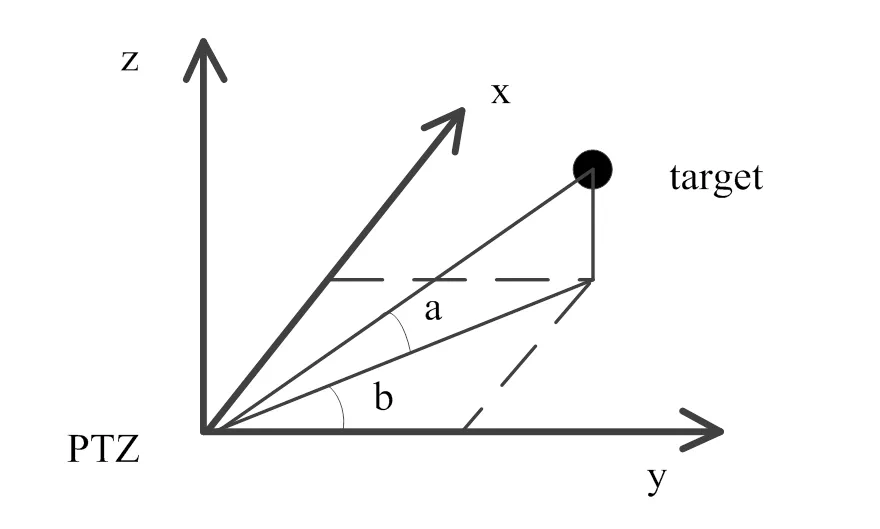
图3 目标与云台坐标系关系
目标相对于云台坐标系的相对位置信息为:
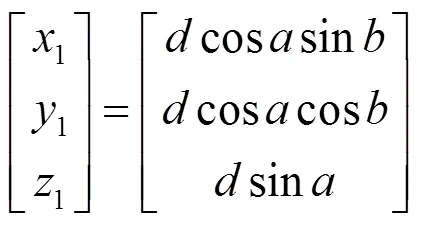
式中:1、1、1为目标在云台坐标系内的坐标信息;为目标相对云台的直线距离;为目标相对于云台的俯仰角;为目标相对于云台的方位角。
实际应用中,云台所处的安装基座一般要高出地面或者建筑物一定高度,长期受到大风或者振动影响后基座面相对于初始安装时往往会发生一定的姿态改变,这会造成目标相对于云台自身的相对位置也会发生轻微变化,进而一定程度上会影响对目标的定位解算精度。因此引入云台内倾角仪输出的姿态信息对云台姿态进行校正。目标与发生偏移后云台坐标系关系如图4所示。
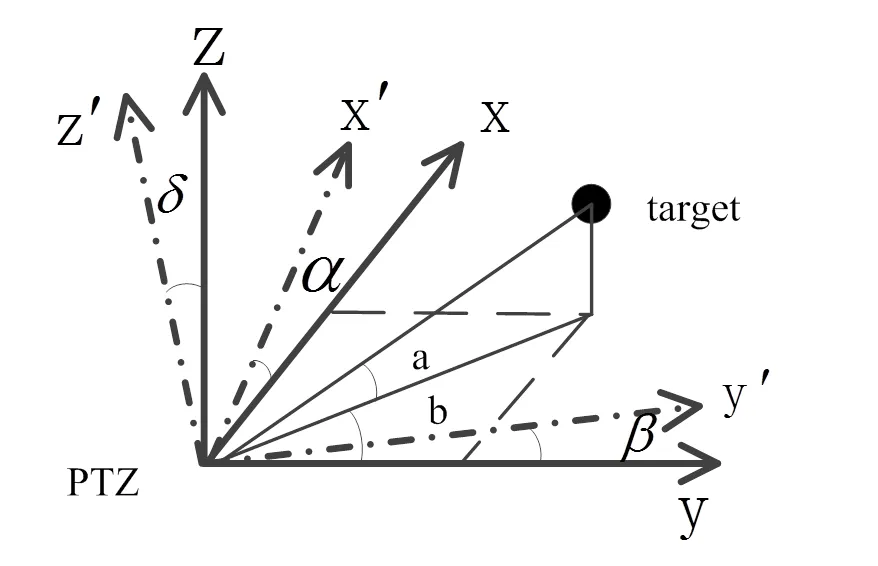
图4 目标与偏移后的云台坐标系关系
目标在偏移后的云台坐标系的绝对位置信息为:
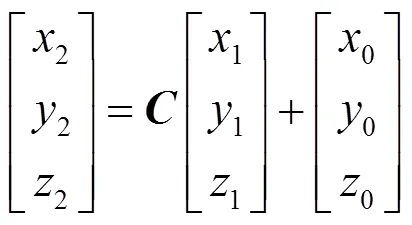
式中:0、0、0为在大地坐标系下三轴的坐标;2、2、2为在大地坐标系下三轴的坐标;、、分别为偏移后的云台坐标系各轴相对于原坐标系各轴的姿态变化角度,矩阵为:

2 云台伺服系统设计
云台伺服系统采用经典的位置环、速度环、电流环三环设计,通过位置环结合速度环和电流环实现云台根据雷达系统引导信息调转到指定位置,由于雷达引导坐标位置精确性较差且具有滞后性,需要进一步优化工作流程才能锁定测量目标。因此云台在接收雷达引导信息调转到位后,转入识别跟踪流程,识别并锁定跟踪目标船只最高点,并对其进行目标定位测量解算。伺服系统控制方案如图5所示。
其中位置环和电流环采用Proportional integral比例积分控制器,速度环采用Linear active disturbance rejection control线性自抗扰控制器。
自抗扰控制由韩京清教授最早提出,通过跟踪-微分器、反馈控制律、扩张状态观测器组成的控制器不依赖于系统的精确数学模型具有良好的鲁棒性和适应性[5]。针对自抗扰控制中非线性结构多、待调控制参数多的不便于工程化使用情况,高志强教授进一步提出了待调参数数量简化的线性自抗扰控制算法即LADRC,使整定参数和带宽相关,整定难度简化,更适合应用于工程领域[6]。
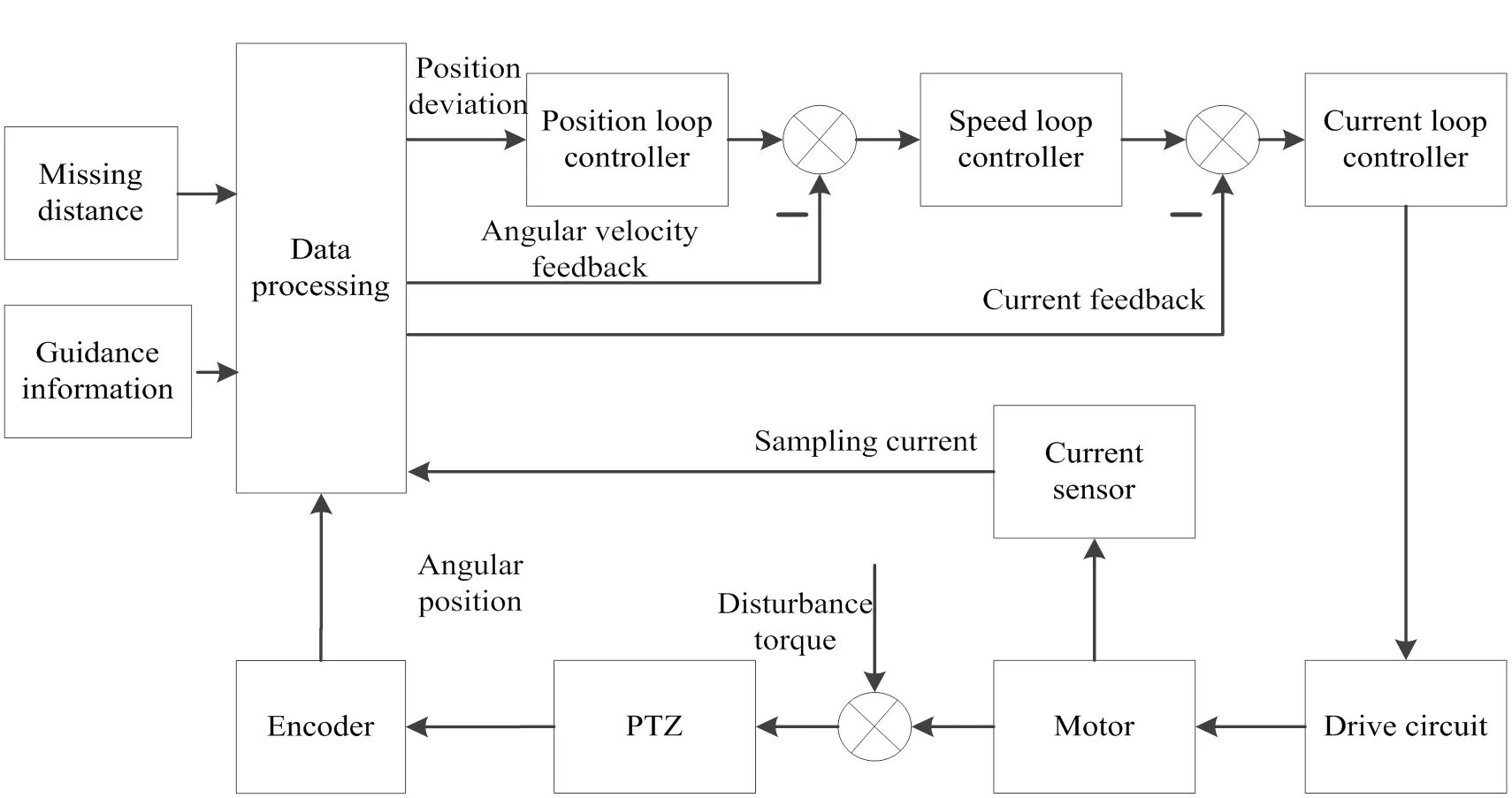
图5 云台伺服系统方案
云台采用表贴式永磁同步电机,电机转矩和运动方程为:
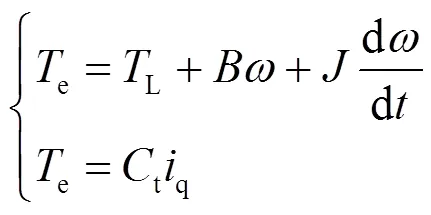
式中:e为电磁转矩;L为负载转矩;为阻尼系数;为电机机械角速度;为转动惯量;t为转矩系数;q为转矩电流分量。
根据电机转矩和运动方程可见,速度环适宜使用一阶LADRC速度控制器,首先设计扩张状态观测器部分。
由式(4)可以进一步得到状态方程:


采用的线性状态观测器方程为:

式中:为系统观测的状态量;为系统实际的状态量;为系统输入量。
由式(5)、式(6)可以得到:
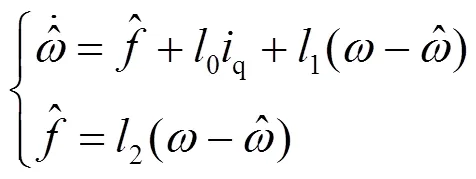

式中:0为控制律输出量。
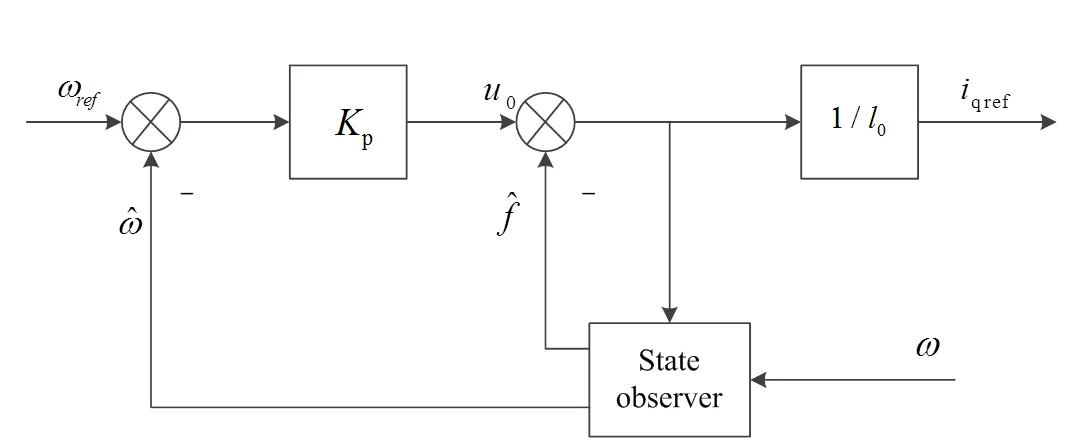
图6 速度环LADRC控制器结构
系统中俯仰向采用J180LWX005型无刷力矩电机和EAC90F-0M21S型光电编码器,采用的电机和编码器参数如表1所示。
速度环给定转速ref=3.66°/s,分别测试速度环采用PI控制器和LADRC控制器速度响应情况,并在速度达到稳定后突加一固定干扰力矩,速度环响应曲线如图7所示。
由图7、图8可见采用LADRC控制器后,云台速度环可更快抑制扰动,转速控制波动量小更加平稳,位置调转响应更快。
位置闭环响应曲线如图8所示,电机初始位置为30°,测试时先回到0°位置,再调转至50°位置。
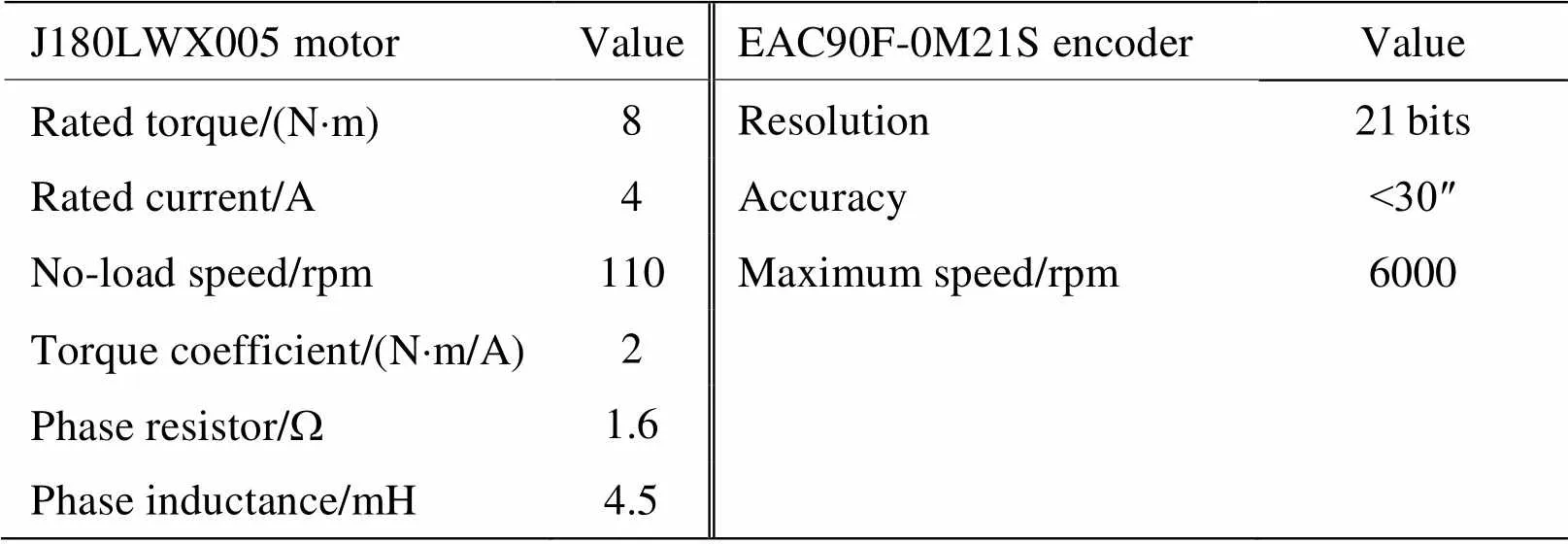
表1 电机和编码器参数
3 系统软件设计
该目标定位系统工作流程如图9所示。云台根据雷达引导信息调转至指定位置,由于雷达引导位置存在一定误差,加上目标船只处于移动状态因此雷达引导信息具有滞后性,且雷达不能获取到目标最高点位置,因此云台调转到位后不能立刻进行目标船只定位测高,需要先识别选定视场内目标船只最高点,然后再开启跟踪锁定目标船只最高点进行定位测高。

图7 速度环响应曲线对比
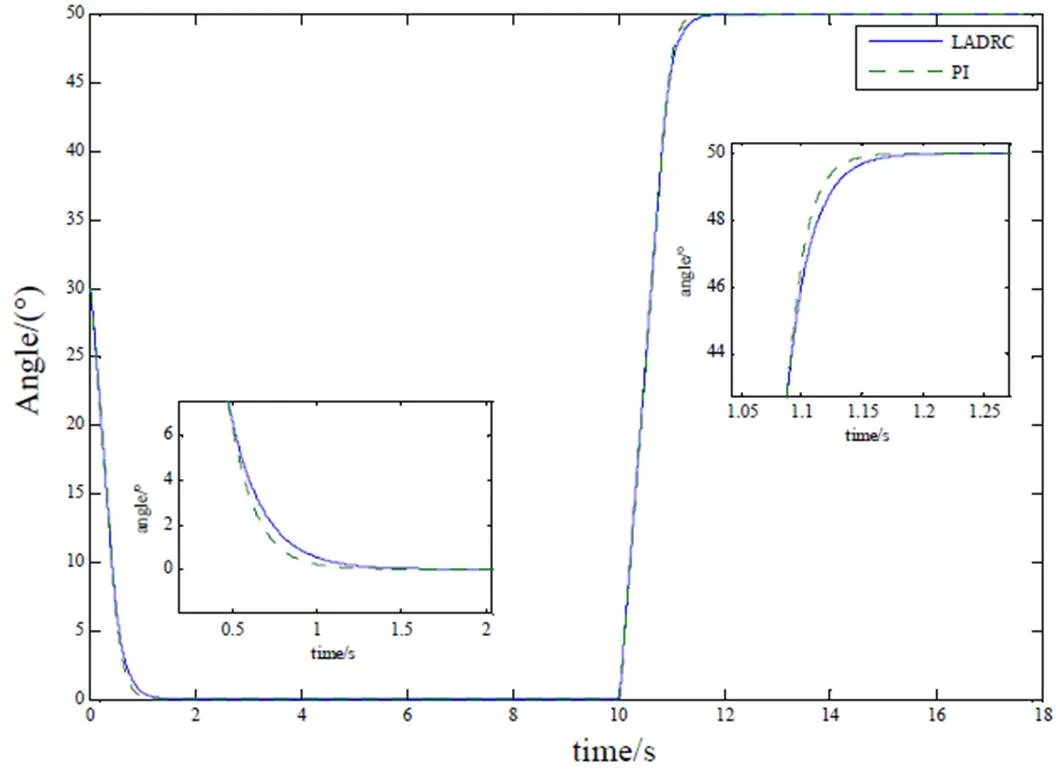
图8 位置环响应曲线对比
在得到目标船只测距值后,通过依次读取云台倾角仪获取云台相对大地坐标系姿态角、云台编码器值获取目标船只相对云台坐标系极坐标,结合云台所处的经纬度高程信息,即可解算出目标船只准确的经纬度和高程信息。
4 测试结果
随机选取了4个不同方向不同距离的目标点对系统的测量精度进行测试,目标点经纬度测试情况如表2所示。
目标点高程测试情况,如表3所示。综合表2和表3可见,该系统对目标点在经纬度测量上误差不超过5m,高程测量上误差不超过2m,可实现较高的测量精度。

图9 系统工作流程

表2 目标经纬度测量对照

表3 目标高程测量对照
5 结束语
文中提出了一种光电式高精度目标船只定位系统,利用该系统可获取较高精度的目标位置和高程信息,有效提高了目标定位测算的准确度和效率。
试验表明了该设计的合理性。试验结果证明该系统可给出目标位置较高精度的定位数据,投入使用后工作稳定可靠,具有良好的性能,在无人值守监控定位领域具有广泛的应用前景。
[1] 张艳军. 通航桥梁对船撞击动力响应研究[J]. 铁道工程学报, 2016(10): 77-82.
ZHANG Yanjun. Research on the dynamic response of isolated bridge to barge impact[J]., 2016(10): 77-82.
[2] 张攀科. 水上跑道侵入风险演化机理及预警模型研究[D]. 武汉: 武汉理工大学, 2018.
ZHANG Panke. Study on Evolution Mechanism and the Early Warning Model of Water Runway Incursion Risks[D]. Wuhan: Wuhan University of Technology, 2018.
[3] 王丹, 董亚力. 桥区水域船舶安全控制高度测量系统设计[J]. 船舶科学技术, 2017, 39(11A): 34-36.
WANG Dan, DONG Yali. Design of height measurement system for ship navigation safety control in bridge area[J]., 2017, 39(11A): 34-36.
[4] 王冬华, 吴壮志. 海防监控系统中雷达引导功能的设计与实现[J]. 计算机工程与科学, 2008, 30(2): 42-45.
WANG Donghua, WU Zhuangzhi. Design and implementation of the radar guidance in the coastal defense video surveillance systems[J]., 2008, 30(2): 42-45.
[5] 岳尚武, 季诚胜, 孙德新. 永磁同步电机伺服系统控制中的自抗扰控制策略[J]. 红外技术, 2020, 42(2): 121-126.
YUE Shangwu, JI Chengsheng, SUN Dexin. Auto disturbance rejection control strategy in servo system controlling with permanent magnet synchronous motor[J]., 2020, 42(2): 121-126.
[6] 朱斌. 自抗扰入门[M]. 北京: 北京航空航天大学出版社, 2017.
ZHU Bin.[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2017.
[7] 曾岳南, 周斌, 郑雷, 等. 永磁同步电机一阶线性自抗扰控制器的设计[J]. 控制工程, 2017, 24(9): 1818-1822.
ZENG Yuenan, ZHOU Bin, ZHENG Lei, et al. Design of 1st-order linear active disturbance rejection controller for PMSMs[J]., 2017, 24(9): 1818-1822.
Design and Implementation of a High-precision Ship Target Photoelectric Positioning System
LI Yingjie1,LI Shaojun1,JIANG Peng2,LU Jiacheng2,CHEN Li1,LIANG Dongdong1,ZHOU Lei1
(1..,210000,, 2.,210000,)
Herein, the design and implementation of a high-precision photoelectric ship target positioning system is introduced to obtain the absolute position and elevation of a moving ship target for real-time measurements in places such as sea-crossing bridges or coastal airports. By integrating high-definition and high-precision optical detection components into the high-definition PTZ equipment, the absolute position and altitude information of the target point can be calculated in real time and reported to the monitoring system. Combined with the guidance of a radar system, it can automatically measure the longitude, latitude coordinates, and altitude of passing ships under unattended conditions. An actual operational test showed that the system had good reliability, measurement accuracy, and application prospects.
optical detection assembly, PTZ, unattended, automatic calculation, longtitude and latitude, altitude
TN06
A
1001-8891(2023)10-1090-06
2022-09-03;
2022-09-25.
李英杰(1987-),男,博士,从事光电技术研究。E-mail:lsj_gdsf@163.com。
李绍军(1989-),男,硕士,从事云台伺服控制技术研究。E-mail:lsj_gdsf@163.com。
