基于Geomagic Design X 的复杂曲面产品逆向设计
2023-11-02陈晓斐
陈晓斐
(酒泉职业技术学院 机电工程学院,酒泉 735000)
逆向工程(又称逆向技术)是一种产品设计技术再现过程,通过数据采集设备采集目标产品实物的三维数据,对数据进行处理后得到目标产品数据模型,通过逆向三维软件重新构造目标产品三维模型,最后利用计算机辅助设计(Computer Aided Design,CAD)、计算机辅助工程(Computer Aided Engineering,CAE)、计算机辅助制造(Computer Aided Manufacturing,CAM)等系统实现产品的分析、再设计、数控编程以及数控加工等过程。文章以蓝光雾化消毒枪的逆向设计为例,详细介绍使用三维扫描仪获取目标产品点云数据、数据处理、逆向建模及偏差分析的全过程。
1 逆向设计及其工作流程
传统的产品设计以正向设计为主,通常从概念设计开始,通过三维设计软件创建三维数字模型,完成产品的制造生产。逆向设计与正向设计相反,是根据产品实物样件生成三维数字模型,经过创新再制造出产品。正向设计与逆向设计对比图,如图1 所示。逆向设计通常是对已经设计的产品或者完成的实物模型进行结构的重构,通过实验、分析及结构的修改,得到符合要求的结果,再对修正后的模型或者样件进行扫描和造型等操作,得到所需的三维数字模型。逆向设计的产品因为有实际的使用数据,更接近真实情况,所以可以快速找到产品的合理结构,大幅缩短产品的研发周期,提高研发效率。
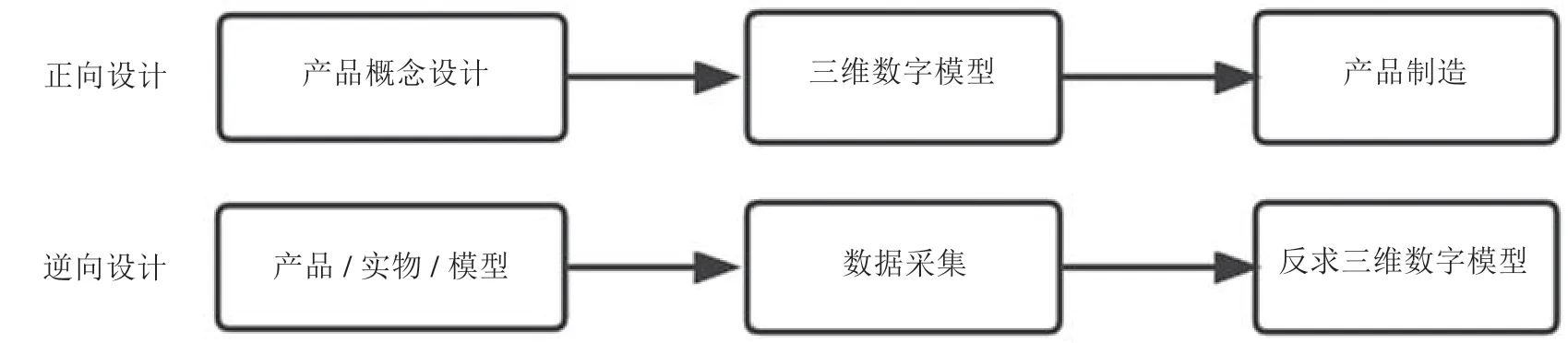
图1 正向设计与逆向设计对比图
逆向设计具体包括实物的数据采集、数据处理以及逆向建模,如图2 所示。
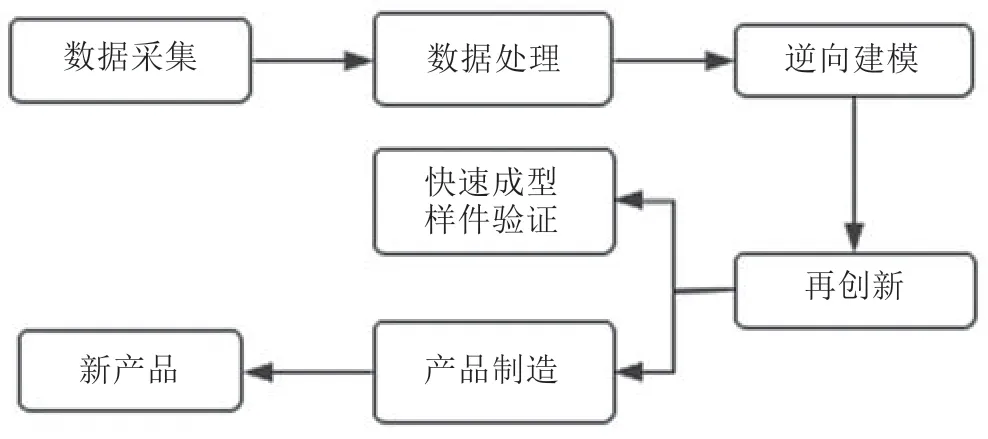
图2 逆向设计及制造流程图
1.1 数据采集
数据采集是采集设备通过特定的技术把物体表面数据转化为空间数据信息,以便后期进行数据处理、修改等工作。目前,产品三维数据的获取主要通过三维测量技术实现。通常采用三维激光扫描仪、三坐标测量机(Coordinate Measuring Machine,CMM)、结构光三维扫描仪等获取样件的三维坐标值。数据采集的精度除与扫描设备的精度有关外,还与扫描软件的精确度有关。因此,提高样件表面数据采集的效率和精度,是逆向工程技术的重要研究对象。
1.2 数据处理
数据处理可以为曲面重构提供有用的三角面片模型或者特征点、线、面,主要方法包括杂点的删除、多视角数据拼合、数据简化、数据填充和数据平滑等。
1.2.1 杂点的删除
测量物体过程中,常需要一定的支撑或者夹具。采用非接触式测量方式进行测量时会把支撑或者夹具扫描进去。这些都是体外的杂点,需要删除。
1.2.2 多视角数据拼合
为了获得样件表面所有的数据,需要进行多方位扫描,得到不同坐标下的多视角点云。合并不同视角的测量数据可以获得多视角数据。
1.2.3 数据简化
当测量数据的密度很高时会存在大量的冗余数据,严重影响后续算法的效率,因此需要按一定要求减少数据量[1]。
1.2.4 数据填充
测量物体结构过程中,会出现部分表面结构无法测量的情况,导致三维数字化模型存在数据缺损,因此需要对数据进行填充补缺。
1.2.5 数据平滑
样件表面粗糙度、测量操作等,都会导致数据出现噪声点,影响曲面重构的质量。需要通过数据的平滑处理提高数据的光滑度,改善曲面重构质量。
1.3 逆向建模
逆向建模是利用经过处理的测量数据,根据需要得到样件模型三维模型的过程。一般有两种重构方法:一是对表面复杂但精度要求较低的产品(玩具、艺术品等)的逆向设计,通常采用基于三角面片的方式直接建模;二是对表面复杂且精度要求较高的产品的逆向开发,通常采用拟合曲面或者参数曲面的方式建模,以点云为依据,通过构建点、线、面等模型元素,还原初始三维模型。
2 蓝光雾化消毒枪的逆向设计
2.1 点云的数据采集
数据采集时,物体表面数据通过扫描设备扫描后以点的形式输出记录,这些数据就是点云数据。每一个点包含有三维坐标以及有关该点属性的其他信息,如颜色、反射率、强度等。点云数据是具有高精度、高分辨率和高维度的几何信息,可以直观表示空间中的物体形状、表面和纹理等,可以应用于三维建模、场景重建、机器人导航、虚拟现实以及增强现实等场景。
目前,产品三维数据的获取主要通过三维测量技术实现,通常采用三坐标测量机、三维激光扫描仪、结构光三维扫描仪等获取样件的三维坐标值[2]。
数据采集使用三维天下公司的Win3DD 单目三维扫描仪(增强版)。扫面前需要做好前期准备,包括3 个方面。第一,环境。三维扫描仪应在稳定的环境中进行,避免强光和逆光,以保证三维扫描仪结果不受外界因素的影响。第二,校准。扫描前,要对三维扫描仪进行标定,确保3D 数据的精确三维扫描。第三,表面处理。扫描设备很难扫描半透明材料(玻璃制品、玉石)、有光泽、深槽或有较暗表面的工件。因此,需要在工件表面喷涂一层薄薄的显影剂,以便更好地扫描物体的三维特征,使数据更加准确。需注意,显影剂喷涂过多会增加物体的厚度,影响扫描精度。
扫描过程中,实物模型各面无法一次全部扫描。为使点云数据完整显示实物结构,需要在实物上粘贴标志点,对扫描平面进行定位。多角度扫描实物模型后,软件会根据各面标志点确定各面的相对位置,进行自动拼接生成实物模型完整的扫描工程文件。在粘贴实物模型标志点时,应将标志点分散贴在实物模型的平面部分或曲率较小的位置,尽量不要贴在同一直线上,保证标志点均匀分布,改善扫描仪捕捉效果,以便获得较为完整的点云数据。图3 为蓝光雾化消毒枪标志点粘贴图,图4 为系统按照标志点位置将不同位置和角度的扫描数据对齐后获得的蓝光雾化消毒枪完整的三维点云数据。

图3 蓝光雾化消毒枪标志点粘贴图

图4 蓝光雾化消毒枪点云数据
2.2 点云数据预处理
点云数据预处理主要涉及点云去噪声、配准、简化以及补洞等。通过点云数据预处理,可以去除点云数据中的噪声和外点,在保持几何特征的基础上实现点云数据的简化,并将不同角度扫描的点云统一到同一坐标系下,为后续的曲面构建及三维实体模型生成提供稳健的数据基础。点云数据预处理的效果是后期建模精度的主要影响因素[3]。蓝光雾化消毒枪的点云数据封装图,如图5 所示。

图5 蓝光雾化消毒枪的点云数据封装图
2.3 蓝光雾化消毒枪的逆向建模
本次逆向建模使用的是Geomagic Design X 软件。该软件为常用逆向工程软件,可以将3D 扫描结果快速、准确地创建成三维模型,具有强大的点云数据处理、曲面拟合及面片草图功能,建模效率高。
2.3.1 领域组划分
将点云数据处理的STL 格式文件导入Geomagic Design X 软件,利用领域组功能将模型面片分成多个特征区域,如图6 所示。

图6 领域组划分图
2.3.2 面片拟合
通过与蓝光雾化消毒枪实物对比发现,生成的蓝光雾化消毒枪外表面为不规则曲面,不能使用特征命令直接生成蓝光雾化消毒枪外形的三维模型,因此需要通过零件曲面拟合工具和曲面剪切工具重建蓝光雾化消毒枪三维模型。
使用面片拟合命令拟合出手柄外形轮廓,然后采用面片草图的方法生成手柄端面封闭平面,最后使用剪切合并命令完成手柄三维实体模型的重建,如图7 所示。

图7 手柄拟合曲面
蓝光雾化消毒枪头部是不规则形状,由自由曲面构成,因此需要通过零件曲面拟合工具与曲面剪切相结合重构模型。具体建模方式与柄部建模方式一致。头部拟合曲面,如图8 所示。
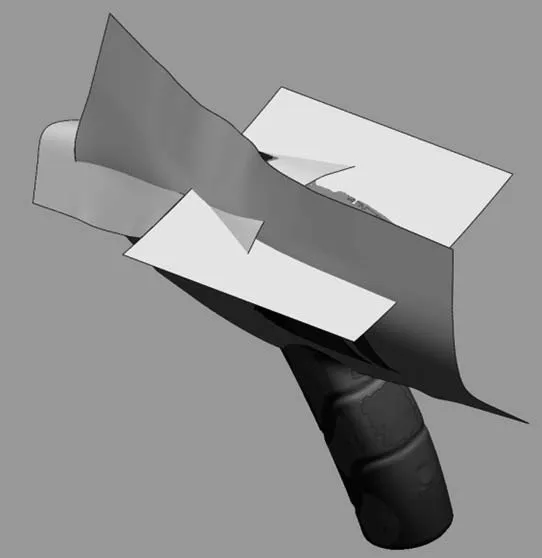
图8 头部拟合曲面
2.3.3 面片草图
整个模型中存在部分非曲面结构。对于这部分的建模,可以使用面片草图建模的方法来完成。首先,选择合适的平面作为投影平面,将所需要的轮廓线投影到投影平面生成可编辑草图。其次,使用草图绘制及编辑功能,拟合并绘制出所需截面形状轮廓。最后,使用实体建模特征命令,如旋转、拉伸、扫掠、倒角等,完成对应结构的建模。柄部凹槽的面片草图,如图9 所示。

图9 柄部凹槽的面片草图
3 偏差分析
为保证重建模型精度的要求,需要检测重建三维模型与原模型之间的误差[4]。在Geomagic Design X软件中,使用“偏差”功能可以确定重建的三维模型与原模型之间的误差。在偏差云图中,许可公差范围为-0.1 ~0.1 mm 的结构在软件中用绿色显示。误差的正偏差越大,这部分显示的颜色在软件中越接近红色;误差的负偏差越大,这部分显示的颜色在软件中越接近蓝色。可以根据各部分的误差情况,合理调整模型数据,重构三维模型,最终达到所需的精度要求[5],如图10 所示。

图10 蓝光雾化消毒枪的偏差分析
4 结语
以蓝光雾化消毒枪的逆向设计为例,详细介绍使用三维扫描仪和Geomagic Design X 软件进行产品逆向设计的一般过程,可为复杂曲面产品的逆向设计提供新的思路和方法。
