BIM 技术在模板脚手架设计与施工中的应用
2023-11-02张文强
廖 飞 张 坤 周 文 张文强 丁 诚
中建-大成建筑有限责任公司 北京 100080
1 工程概况
某模板脚手架工程为高层城市综合体,涵盖了商业、写字楼、酒店、会议中心等功能建筑。建筑面积为3.15×105m2,高度为60m,结构层数19 层。工程拟用模板为长1830mm、宽915mm、高15mm 的覆膜胶合板,脚手架为φ48.3m×3.6m 的普通钢管脚手架。
该模板脚手架项目结构高度复杂,模板周转次数较多,现场割据作业强度较大,且场地狭窄,对模板脚手架进场控制造成较大困难。若采用传统模板脚手架,存在设计工序繁琐、材料统计误差因素多等问题,且无法确保外在视觉效果。
为此,根据模板脚手架设计需求,首先完成模板脚手架建模。在三维可视化平台上,将模板脚手架组成构件修改为插件格式,获得三维模板脚手架信息模型。借助BIM技术进行模板脚手架施工与配模,同时统计工程量,开始模板的集中加工,确保模板脚手架项目的精细化水平。
2 BIM技术在模板脚手架设计中的应用
2.1 建立模板脚手架族库
模板脚手架族库构建是BIM 技术在模板脚手架设计中应用的前提,可以大幅度提升模板脚手架设计效率及图像准确性。在模板脚手架构件族模型制作时,选择标准构件族中建筑族分组的常规模型。在模板脚手架构件族制作时,逐次进行杆类、顶托、可调底座及其他部件的制作[1]。
在杆件制作时,借助Revit 软件“构件”按钮下“内建模型”栏的常规模型拉伸功能,进行圆钢管基础族绘制。绘制后,设置壁厚(TH)、标高上长度(E)、内筒直径(DI)、相对标高下长度(S)、外壁直径(DO)等参数,载入构件族内(见表1),明确各构件族内基础圆钢管的直径、长度。

表1 模板脚手架族库 mm
在不同圆管参数设定的基础上,设定连接盘厚度为10mm,经Revit 软件拉伸做成基础族,载入待绘制构件族内,与钢管组合固定。一般焊接横杆插头应用于横杆,斜杆插头则应用于斜杆(水平/ 竖向)。根据相对位置,将基础构件组合成不同类别的杆件,并进行构件截面尺寸、重量、材质的一体化设置。比如,1500mm 横杆长度为1436.600mm,相对标高下长度为78.500mm,标高上长度为1421.500mm,重量为10.53/ 11.77kN,截面尺寸为φ60.3mm×3.2mm。
在顶托与可调底座制作时,选择普通8mm 厚钢板,借鉴杆件圆管参数设置标准,进行钢管长度与模型类型调整,或者进行可调螺母位置参数的单独设置。如450mm长的可调底座材质为Q235,长度为450.000mm,相对标高下长度为8.000mm,标高上长度为458.000mm。
在其他构件制作时,选择Revit 软件内标准尺寸构件,默认长度单位,进行多尺寸钢板组合。如龙骨长度默认1000mm 单位长度。
2.2 搭建模板脚手架模型
在族库搭建完毕后,将整个模板脚手架视为一个格构柱、格构间部分框架组合,恰当调整立杆布置方式、斜杆布置方式。一般需要先绘制轴网,在轴网内定义格构柱,确定模板脚手架结构体系的生成位置。在上边界、下边界一定的情况下,于Revit 软件内,经On Startup()方法重载,并在Tab 操作栏加载系统Panel 内族,自动搭配顶撑、立杆、底座、斜杆、垫块以及安全网、护栏、脚手板、龙骨等辅助结构,促使轴线位置生成模板脚手架整体框架。
2.3 设计模板脚手架方案
在模板脚手架模型构建完毕后,输入设计参数,点击Revit 软件内“配置确认”按钮,在参数设置窗口下弹出的提示字体内查看设计校核。并点击选择“设计校核”按钮,查看前期配置脚手架参数信息通过与否,包括布置参数(立杆纵距、横距、步距等)、荷载参数(基本风压、施工荷载、风荷载体型系数等)。若顺利通过,则开展下一步确认操作,获得模板脚手架设计成果。模板脚手架布置参数和荷载参数设计校核分别见表2 和表3。

表2 模板脚手架布置参数设计校核
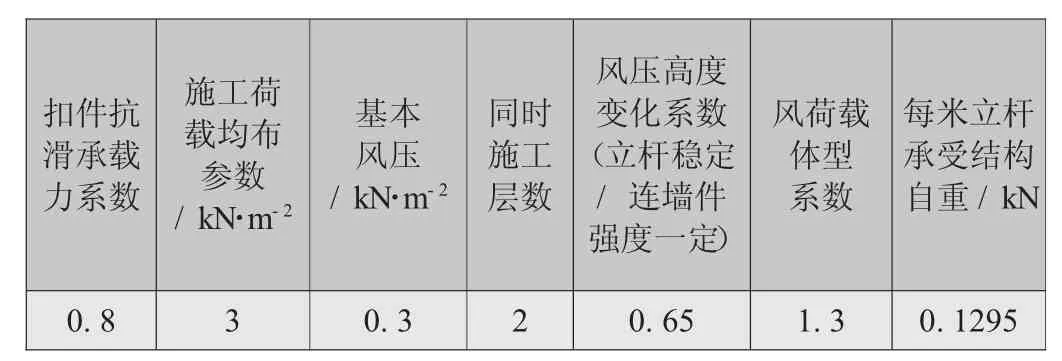
表3 模板脚手架荷载参数设计校核
根据设计校核结果,经Revit 后台计算,可以确定大横杆的抗弯强度与最大挠度、小横杆的计算强度与最大挠度、单扣件康华承载力与不组合风荷载立杆稳定性、组合风荷载立杆稳定性和连墙件稳定性均满足要求。进而导出模板脚手架专项方案计算书,并在Revit 软件智能生成按钮的支持下,选择需要生成的模板脚手架层数,根据要求生成对应层数的模板脚手架三维可视化模型。
3 BIM技术在模板脚手架施工中的应用
3.1 虚拟仿真施工
在模板脚手架三维立体模型建立的基础上,根据表1、表2、表3,进行模板脚手架模型参数设置。在模型参数设置完毕后,关联模板脚手架工艺参数、施工因素,开展虚拟仿真施工,预先协调模板脚手架设计施工问题,提高模板脚手架施工期间资源匹配度,确保施工效率。
根据模板脚手架施工实践情况,区域支撑架体为φ48.3m×3.6m 普通钢管脚手架。基于此,可在BIM 模板脚手架设计模型中,进行计算依据、结构类型、材料安全参数、构造要求的复核。确认无误后,利用在Revit 软件自带智能计算模块、布置引擎,在短时间内完成立杆、横杆、连墙件、支撑架的虚拟布置,并实时展示每一部分的安全计算结果,满足模板脚手架工程流水段施工安全开展需求[2]。同时,根据高支模特点,后台生成危险性分析计算书。并在对模板脚手架施工关键节点进行局部放大处理的基础上,自动验算局部失稳风险、返工概率与外在整体美观性。根据验算结果,自动调整或指导施工者调整模板脚手架构件位置,避免返工问题。通过虚拟修正模板脚手架三维模型中楼梯间部位、阳角部位,可在确保高大模板支撑体系施工安全性的同时,降低施工期间模板脚手架配件材料无价值损耗率。在支撑架虚拟仿真施工的基础上,根据1830mm×915mm×15mm 的覆膜胶合板特点,选择适宜规格的原材料,智能设置梁下模板切割方式、切割损耗率、模板拼接最小块数、墙柱模板拼接方向、裁切缺口边最大值、水平模板配莫模方式等参数,一键快速配模,降低高大支模施工中配件无价值损耗或固体废物大量产生概率。一般需要先提取BIM 配模立体模型,再确定模板位置关系,最后分析模板切割情况并输出配模图与配模详细列表。通过虚拟方针施工成果输出,可以为模板脚手架现场实体施工提供充足支持,实现源头材料的精准化应用,确保工期内高质量施工任务顺利完成。
3.2 精细化施工管理
借助BIM 算量软件,搭建三维与二维结合的模板脚手架施工模型,快速读取模板脚手架各个施工工序的信息,奠定精细化管理基础。进而从模板脚手架工程中无法把握的施工细节着手,进行针对性管理。在全面平衡模板脚手架施工期间人力资源、材料资源、设备资源的基础上,可以借助Revit 软件建立模板脚手架识别区域,对构件深化加工、运输检查、安装验收整个过程进行追踪定位。比如,爬梯是模板脚手架体系的重要组成部分,常用的爬梯为结构形式固定且构造方法简单的外部爬梯。在外部爬梯施工期间,施工人员可以借助BIM 技术全程监控管理施工过程。并从前期构建的模板脚手架构件族库内导入底座、布置、护栏等信息,由后台自动判定施工期间底标高、顶标高偏差,在后台报错后,及时提醒施工人员修正。进而以底标高、下生根间距与可调底座下限为控制节点,在三维软件内判定爬梯下生根位置,根据后台报错结果提醒人员修改,反之则生成单元模型,为后续验收提供依据。
3.3 三维可视化交底
传统施工中,因图纸均为二维平面视图,模板脚手架专项施工方案编制需要时间较长。加之有的操作者基础知识水平不高,无法有效理解设计图纸,操作人员技术交底难度较大、耗时较长。同时在实体施工中,杆件尺寸选择、横杆步距确定、立杆间距确定、剪刀支撑布置等问题长期存在于阴阳角施工环节,交底难度较大,对工效工质造成了较大的负面影响,甚至引发复杂节点搭设错误返工、局部失稳、机械窝工等系列问题[3]。基于此,可以在Revit软件内一键生成模板脚手架三维施工软件,自动智能验算计算书、材料清单与模板脚手架专项施工方案,多视角展示模板脚手架三维立体图纸。同时利用虚拟现实技术(Virtual Reality,VR)技术与BIM 技术,对操作者进行交底。在技术交底期间直观显示相邻立杆之间距离、各个复杂阴阳角杆件尺寸、剪刀支撑位置、横杆布局,有效指导操作者按图施工,降低技术交底难度。
4 结语
综上所述,在模板脚手架设计与施工中应用BIM 技术,返工率有效下降,工期有效缩短,可以确保工程效益,应用推广可行性较高。因此,在模板脚手架工程开展过程中,设计人员应借助BIM 技术,构建模板脚手架三维模型。而施工人员则可以根据模板脚手架三维模型,进行虚拟仿真施工与精细化施工管理,同时开展三维可视化交底,预先确定模板脚手架实体施工期间与预埋管线或设备碰撞问题,及时交底,确保模板脚手架实体施工高效高质开展。