基于CLEAN算法的自适应旁瓣对消技术
2023-10-31柴许杨赵志国岳玫君
柴许杨,赵志国,岳玫君,刘 野
(1.中国电子科技集团公司第三十八研究所,安徽合肥 230088;2.孔径阵列与空间探测安徽省重点实验室,安徽合肥 230088;3.中国人民解放军93534部队,天津 301700;4.国防科技大学电子对抗学院,安徽合肥 230037;5.中国人民解放军63726部队,宁夏银川 750004)
0 引言
自适应旁瓣对消技术是抑制旁瓣有源干扰的一种非常有效的措施[1-2],基本原理是在雷达主天线附近安装(或在主阵面抽取部分阵元合成)若干个覆盖主天线副瓣区域的辅助天线,当存在副瓣干扰时,主天线和辅助天线接收的干扰信号幅度相当,利用主天线和辅助天线之间存在强相关的干扰信息,通过自适应算法得到最优加权系数,辅助天线和最优加权系数求和后与主天线接收的信号进行对消,达到干扰抑制的目的。当目标稳定跟踪后,信噪比较大时,辅助天线中存在较强的目标信息,主天线和辅助天线之间也存在目标信息的强相关性,因此,自适应旁瓣对消处理也会出现目标相消的情况。文献[3]分析了旁瓣对消天线的个数和位置、噪声以及回波信号对旁瓣对消性能的影响,然后从如何选取对消天线的个数和位置进行了仿真和工程实现,并未深入分析对消天线中存在目标信号对自适应旁瓣对消性能的影响。文献[4]系统地分析了对消天线中存在目标信号对测角性能的影响,同时根据目标的角度信息,在阵元级构造对消天线的导向矢量来剔除目标信号。考虑对消天线的增益和主天线副瓣增益相当以及需对消的干扰源个数,因此对消阵元的个数会很多,运算量也会相应增加。
在工程应用中发现,自适应旁瓣对消技术在完成对消的同时,会造成跟踪高信噪比目标的信噪比损失,进而导致测角精度降低。本文从波束域的角度,提出了基于CLEAN 算法思想的自适应旁瓣对消方法,利用雷达先验信息构造目标回波模型,然后在脉冲压缩前/后的对消通道中完成目标信息的剔除,最后进行自适应旁瓣对消完成干扰的抑制,降低自适应旁瓣对消带来的测角精度损失[5-8]。
1 自适应旁瓣对消原理
自适应旁瓣对消的原理如图1所示,对消剩余表达式为[1-2]

图1 自适应旁瓣对消原理图
式中X表示主通道的信号,Y0,Y1,…,YN-1表示N个对消通道的信号,W0,W1,…,WN-1表示N个对消系数,Z表示对消剩余,H 表示共轭转置,∗表示共轭,W=[W0,W1,…,WN-1]T,Y=[Y0,Y1,…,YN-1]T,T 表示转置。
采用最小均方(LMS)准则[1],使对消剩余功率最小,即
式中,E{·}表示统计期望,RYX表示主通道和对消通道的互相关矩阵,RYY表示对消通道的自相关矩阵。
式(2)中P(W)不仅是一个二次型函数,而且还是一个凹型超抛物体曲面,具有唯一的极小值点。因此将P(W)对W进行微分,即
可得到最优权值表达式为
因此对消功率剩余的最小值为
2 对消性能分析和测角精度影响
干扰抑制比(CG)是衡量自适应旁瓣对消性能的一个重要指标,定义为无对消通道时的干扰输出功率和有对消通道时的干扰输出功率的比值[3]:
以一个对消通道为例,JM表示主通道的干扰信号,JA表示对消通道的干扰信号,JO=JM-WHopt⋅JA表示对消后的干扰输出,其中Wopt=E{JMJ*A}/E{|JA|2},因此,可得到的最佳对消抑制比为[1]
式中ρ为主通道和对消通道受到的干扰的互相关系数。由此可见,相关性的增大会导致干扰对消性能的提高。同理可得,如果是针对回波中的目标信息,相关性的降低就会减少目标对消损失。
对消抑制比的降低同时也会带来和差比幅测角的精度损失,理想鉴角曲线和旁瓣对消后的鉴角曲线分别为[4]
式中,θT为目标角度,θJ为干扰角度,∑和Δ分别为主通道和差波束输入,G∑(θT)、GΔ(θT)、G∑(θJ)和GΔ(θJ)分别为和、差波束在目标和干扰方向上的增益,GA(θT)和GA(θJ)分别为对消通道在目标和干扰方向的增益。两者的鉴角曲线差异为
当目标处于主波束中心时,主通道的差波束增益GΔ(θT)≈0,通常对消通道的增益和主通道的副瓣的增益设计得相当,可得GA(θJ)≈GΔ(θJ),此时有
由式(11)可得,自适应旁瓣对消前后鉴角曲线的误差主要来自于对消通道中的目标信号,因此,消除对消通道的目标信号可以降低自适应旁瓣对消带来的测角精度损失。
3 基于CLEAN算法的目标剔除方法
由以上分析可见,采用自适应旁瓣对消和单脉冲比幅测角时,剔除对消通道中包含的目标信号,不仅降低了自适应旁瓣对消带来的测角精度损失,同时不会影响主通道中干扰的抑制。
CLEAN 算法是由Hogbom 于1974年提出,用于改进综合孔径天文观测成像质量[5],由于在消除旁瓣响应方面的优良性能,该算法被推广至ISAR成像、线性调频信号的脉冲压缩等领域[6-7]。CLEAN算法的基本原理如下:
步骤1:对一幅初始脏图并记ID,找到脏图中最大的绝对亮度点的位置和幅度。
步骤2:根据亮点的位置和幅度构造脏束如式(12),移动该脏束到对应的位置上并乘以一个增益;然后在脏图上减去这个脏束如式(13)。
步骤3:在剩余脏图上重复上述步骤1和2,直至满足迭代退出条件。

因此,CLEAN 算法主要功能是通过不断迭代寻找峰值和位置,剔除图像中脏图的旁瓣响应。
本文算法思路就是利用其原理对自适应旁瓣对消算法进行改进,首先设置CLEAN 算法退出条件:回波幅度值搜索范围,其次根据雷达先验信息和回波幅度值构造目标的回波模型,用于剔除对消通道中的目标信息,然后再用剔除目标信息后的对消通道数据计算自相关矩阵、互相关矩阵,求解最优加权值,完成自适应旁瓣对消处理,当满足算法退出条件后,找出最优回波幅度值来重新构建回波模型,将对消通道中目标信息剔除,然后再进行一次自适应旁瓣对消处理。基于CLEAN算法的自适应旁瓣对消流程如图2所示。
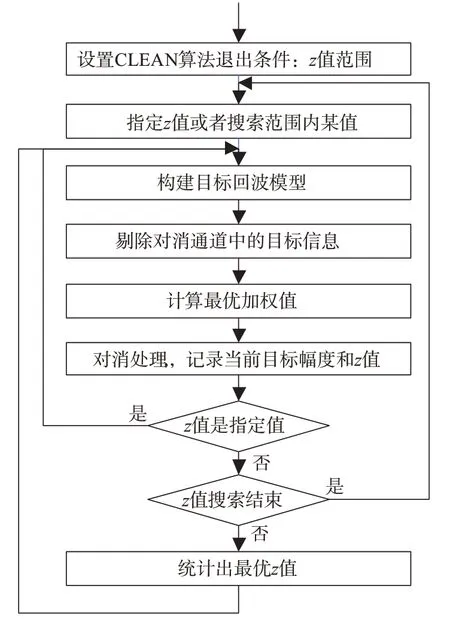
图2 基于CLEAN算法的旁瓣对消流程图
基于CLEAN 算法的自适应旁瓣对消步骤如下:

步骤2 若z值没有指定值输入,则从步骤1中的幅度搜索范围内取值,若z值有指定值,则直接取指定值。
步骤3 根据雷达先验信息,以线性调频波形为例,首先根据发射波形的带宽B、脉宽T、采样率fs、载波频率fc,目标距离R0、速度V和加速度a参数,构造目标回波频域模型[8]:
式中γ=B/T表示线性调频信号的调频斜率,Δf=γ/fs表示频域采样间隔,k为频域采样序号。
若是脉冲压缩后对消,还需借助目标的预测距离R0、预测速度V和预测加速度a来构造目标回波频域模型[8]:
步骤4 将构造的目标回波模型S(k)用于剔除对消通道Y=[Y0,Y1,…,YN-1]中的目标信息,剔除后的对消通道数据为Y'=[Y'0,Y'1,…,Y'N-1],
式中n∈[0,N-1]为对消通道序号,Y'n为第n个剔除目标信息后的对消通道。
步骤5 利用新的对消通道数据Y'n,重新计算自相关矩阵R'YY和互相关矩阵R'YX,根据式(4)计算最优加权值W'opt,再根据式(5)进行干扰对消,最后得到对消结果Zmin。
步骤6 根据z取值来源判断程序执行分支,若z值是从步骤1 中的幅度搜索范围内取值,则需记录本次对消结果中目标的幅度信息和本次搜索幅度值,同时程序转入步骤7继续循环执行,若z值是指定值,则不需要记录,程序直接转入步骤3 执行完一次对消处理后退出程序。
步骤7 判断z值是否满足CLEAN 算法退出条件,若满足退出条件,则继续执行步骤8,若不满足退出条件,则跳入步骤2继续执行。
步骤8 统计对消结果中目标幅度最大值对应的z值,然后指定z值作为步骤3的输入,继续执行。
工程中,目标回波模型的幅度z值可根据系统主通道和对消通道的增益关系以及上一帧目标的幅度值进行计算获取,减少计算量。
4 仿真分析
仿真参数设置如下:线性调频信号发射带宽5 MHz,采样率10 MHz,脉宽100 μs。阵面布阵方式为均匀线阵,阵元个数32,主瓣指向法线0°,对消通道取其中2个阵元,目标回波从主瓣方向偏离具体角度(约1/10 个波束宽度)进入,单个阵元信噪比为5 dB,设置一个旁瓣干扰源,干扰从-20°方向进入,单个阵元干噪比为50 dB,蒙特卡洛仿真次数为100。
图3是主通道和差波束及对消通道的方向图,其中对消通道的增益和主通道副瓣增益相当。
图4 是注入干扰后的主通道和差波束在对消通道剔除目标前后的自适应旁瓣对消结果。可见,通过CLEAN算法剔除对消通道中目标信息后,降低了目标在自适应旁瓣对消过程中的目标信噪比损失。

图4 剔除目标前后的对消结果
图5 和图6 是目标角度偏离波束中心1/10 个波束宽度,阵元信噪比由-25 dB 到5 dB,阵元干噪比始终大于目标信噪比40 dB 的情况下,在对消通道剔除目标前后,目标主通道的和差波束幅度差的变化趋势,以及角度测量值的均方根误差。可见,随着目标信噪比增大,本文所提剔除目标后的和差波束幅度差优于不剔除目标的和差波束幅度差,同时剔除目标后的信噪比损失小于不剔除目标的信噪比损失;剔除目标后的角度测量精度优于不剔除目标的角度测量精度。
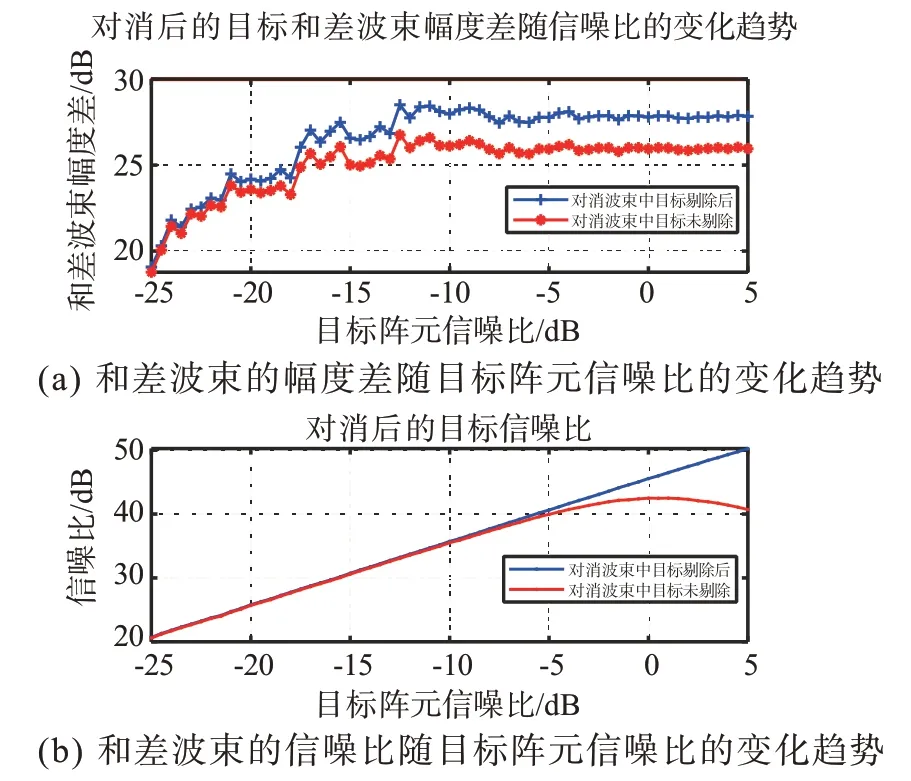
图5 和差波束对消结果随目标阵元信噪比的变化

图6 测角结果随目标信噪比的变化
针对某波段雷达工作时的回波数据进行采集和分析,设备组成包括一台干扰机放置副瓣位置,一台模拟应答机模拟目标,目标方位相对和波束中心固定约0.113°,采集数据进行分析,图7 是对消通道剔除目标信号前后的测角结果。可见,剔除目标前由于将目标当作干扰样本进行对消,造成了目标信息损失,测角精度为0.021°,剔除目标后,测角精度为0.003 6°,本文方法改善了对跟踪高信噪比目标的测角精度。
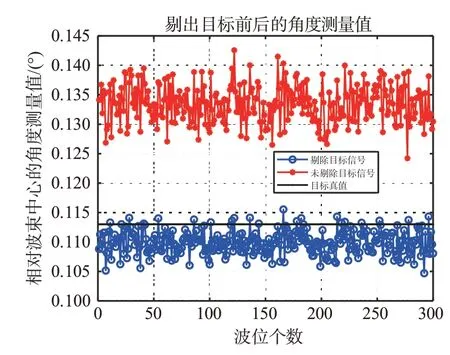
图7 对消通道剔除目标前后的测角结果
5 结束语
本文针对工程应用中存在的高信噪比目标对消损失问题提出的基于CLEAN算法的自适应旁瓣对消技术,经过理论分析、仿真和实测数据验证了该算法的可行性和有效性,该算法通过剔除对消通道的目标信息,降低主通道和对消通道中目标的互相关性,不仅可以减少主通道中目标对消后的信噪比损失,同时也降低了对消后对目标测角精度的影响。
