基于无人机可见光及多光谱数据的林草覆盖率提取方法研究
2023-10-30王光辉任建锋杜文贞
赵 莹, 王光辉, 任建锋, 杜文贞, 邱 浩
(1.山东省水利科学研究院,250010,济南;2.威海水利工程集团有限公司,264200,山东威海;3.滨州市政务服务中心,256600,山东滨州)
林草覆盖率是生产建设项目水土流失防治标准中的一项重要指标。在水土保持监测中,林草覆盖率一般采用样方的监测方法,小面积测量经常代表性差,大面积调查受人力、物力等限制。近年来,无人机越来越多地应用在水土保持监测领域,国内学者基于可见光数据在土石方量、水保措施[1]、植被盖度[2-4]的提取等方面开展了研究。随着无人机技术的发展,无人机搭载多光谱相机获取多光谱影像,已经应用到精准农业等领域,如采用多光谱中红、绿、蓝、近红外、红边等波段进行构建植被指数,结合野外实测数据建立模型预测生物多样性、作物农业参数[5-8]等;不少学者们研究发现,不同的分类方法与遥感数据结合可以满足不同领域测算需求。徐存东等[9]应用监督分类的5种分类器执行分类,支持向量机对于无人机遥感盐碱地信息提取法优于其他方法。孙玉琳等[10]采用8种监督分类方法分析研究区的土地利用状况,在相同的分类条件下,支持向量机分类精度最高。
目前,高分辨率多光谱影像在水土保持林草覆盖率监测的应用较少,且通过比较多种方法,探索不同分类方法在林草覆盖率监测中分类效果的研究也较少。因此,笔者基于无人机多光谱数据计算林草覆盖率,结果与可见光植被信息提取成果进行对比分析,筛选出最优植被指数及分类方法,以期为快速、准确开展水土保持监测提供方法依据。
1 研究区概况
研究区位于山东省东营市垦利区,地理坐标 E 118°15′~119°19′、N 37°24′~38°10′,属于暖温带大陆性季风气候,多年平均气温12.1 ℃,年均降水量556 mm。该区属暖温带落叶阔叶林区,植被组成结构简单。研究区1为黄河口生态旅游区停车场,地类为灌木、草地和硬化路面;研究区2为公路及绿化带(乔、灌、草);研究区3为采油井附近(灌、草)及乡村道路;研究区4为施工区迹地恢复过程中的草地。4个研究区(图1)分别代表乔、灌、草和硬化面1种、2种或3种不同组合,具有代表性。

图1 研究区可见光(RGB)正射影像图
2 数据与方法
2.1 数据来源
笔者使用的无人机为大疆精灵4RTK多光谱版,飞行时间为2020年7月。搭载一体式多光谱成像系统,6个1/2.9英寸CMOS,包括1个用于可见光成像的彩色传感器和5个用于多光谱成像的单色传感器。主要技术指标:1)多光谱传感器,波段设置参数为蓝(B):450 nm±16 nm;绿(G):560 nm±16 nm;红(R):650 nm±16 nm;红边(RE):730 nm±16 nm;近红外(NIR):840 nm±26 nm;镜头焦距为5.74 mm;2)传感器光谱分辨率均为200万像素(1 600×1 200);3)空间分辨率为(H/18.9)cm/像素(H为飞行器相对于建图区域的飞行高度,m),飞行高度采用90 m,飞行参数选择航向重叠率80%、旁向重叠率60%时,GSD约4.76 cm/像素。
数据采用DJI Terra软件进行拼接,形成JPEG(可见光成像)+TIFF(多光谱成像)文件。利用ENVI 5.3软件,分离可见光JPEG图像3通道,提取3个单波段(蓝B,绿G,红R)灰度值。将可见光3波段灰度值和多光谱5波段灰度值分别进行组合加权运算,构造新型植被指数灰度图。用不同分类方法进行分类提取植被信息,采用混淆矩阵法对结果进行精度验证。研究区对应分类方案中采用同一组训练样本;进行精度验证时,分类结果采用同一组验证样本。
2.2 可见光、多光谱植被指数的计算
选择常见的8种可见光指数进行建模[4,11-12],分别为红色度坐标(red,R)、绿色度坐标(green,G)、川岛指数(Kawashima index,IKAW)、可见光波段差异植被指数(visible light band difference vegetation index,VDVI)、红绿比指数(red green ratio index,RGRI)、绿蓝比指数(green blue ratio index,GBRI)、过绿指数(excess green vegetation index,ExG)、过绿减过红指数(excess green minus excess red index,EXG-EXR)。同样,选择常见的8种多光谱指数进行建模[7,11-13],分别为两波段增强型植被指数(enhanced vegetation index 2,EVI 2)、优化土壤调节植被指数(optimize soil-adjusted vegetation index,OSAVI)、归一化植被指数(normalized difference vegetation index,NDVI)、绿色归一化植被指数(green normalized difference vegetation index,GNDVI)、绿色比值植被指数(green ratio vegetation index,GRVI)、红边归一化植被指数(red edge normalized difference vegetation index,RENDVI)、归一化差异红色边缘指数(normalized differential red edge index,NDRE)、土壤调整植被指数(soil-adjusted vegetation index,SAVI)。
2.3 林草覆盖率的计算
林草覆盖率定义为“水土流失防治责任范围内林草类植被面积占总面积的比例”(GB/T 50434—2018《生产建设项目水土流失防治标准》)。根据定义,林草覆盖率计算只包括林地、草地植被信息。根据现有国家标准GB/T 21010—2017《土地现状利用分类》中,有4种占地类型涉及植被信息,即林地、草地、耕地和园地。如果防治责任范围内有耕地、园地占地类型,采用ENVI 5.3软件中剪切或掩膜的方法处理,只保留林地、草地。林草覆盖率=植被信息像元/防治范围总像元×100%。
面向对象的分类方法能够更加充分的利用遥感影像中所包含的信息,回避“椒盐噪声”等对分类结果造成的影响[14]。植被信息的提取应用ENVI 5.3软件进行。
阈值分类法:笔者利用已有研究中采取的阈值迭代法[4]。初始阈值t(最大、最小灰度值的平均值)将灰度图一分为二,求出新阈值T(前景灰度值和背景灰度值所在区间的平均值)。若T≠t,将T赋予t,循环迭代,直到满足T=t,T即为图像的最佳阈值。
支持向量机分类法:支持向量机是一种监督分类的二分类模型[9-10],主要针对小样本数据进行学习、分类和预测。植被信息提取可以看成一种二分类求解问题。进行分类之前先对植被、非植被手工选择训练样本,每组各10个,训练样本在图像中具有代表性且均匀分布。
2.4 结果精度评价
在完成分类之后,使用目视判读的方法从图像上选取100个植被像元、100个非植被像元分别对2类地物分类结果计算混淆矩阵[14]进行验证和精度评价。
3 结果与分析
3.1 可见光、多光谱植被指数计算结果
以研究区1为研究对象,可见光、多光谱各选择常见的8种植被指数进行建模,得到16种灰度图(图2)。经过初次分割,植被与非植被之间的分离度增强。可见光植被指数中R、G、RGRI、IKAW植被亮度低于硬化路面,其他指数相反。可见光植被指数中RGRI、IKAW、GBRI受到航拍光线影响。多光谱植被指数GNDVI、OSAVI、NDRE出现块状阴影,这是由于无人机在获取影像时,受到大气衰减、云雾浓度以及背光和向光等不同程度的影响,会出现亮度和色调的差异,进而影响镶嵌的质量。
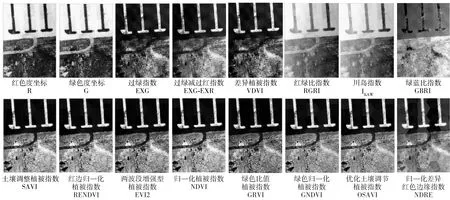
R: Red. G: Green. EXG: Excess green vegetation index. EXG-EXR: Excess green minus excess red index. VDVI: Visible light band difference vegetation index. RGRI: Red green ratio index. IKAW: Kawashima index. GBRI: Green blue ratio index. SAVI: Soil-adjusted vegetation index. RENDVI: Red edge normalized difference vegetation index. EVI2: Enhanced vegetation index2. NDVI: Normalized difference vegetation index. GRVI: Green ratio vegetation index. GNDVI: Green normalized difference vegetation index. OSAVI: Optimized soil-adjusted vegetation index. NDRE: Normalized differential red edge index. The same below.
3.2 可见光、多光谱植被信息提取结果(阈值法)
对可见光、多光谱植被指数计算结果采用阈值分类方法提取植被信息(图3)。可见,整体上多光谱提取植被信息效果比可见光效果好。可见光G、R指数的提取效果较好,EXG、EXG-EXR、VDVI有部分漏分,而RGRI、IKAW、GBRI出现严重的错分和漏分,这与指数计算结果受光照条件出现明暗不均匀有关,进而影响分类结果。而多光谱指数分类的过程中,整体上都表现出较好的分类效果,只有NDRE在低植被覆盖区有很少部分漏分。由此得出,可见光植被指数更容易受到光线照射的强弱影响。
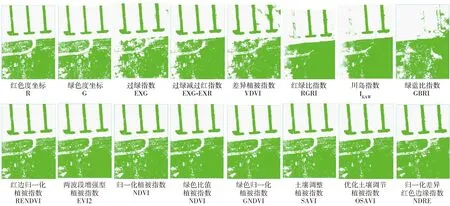
图3 可见光、多光谱植被信息提取结果(阈值法)
3.3 可见光、多光谱植被信息提取结果(支持向量机法)
同样,用支持向量机分类方法提取植被信息,结果见图4。多光谱指数分类效果要比可见光指数效果好,这与阈值分类方法结论一致。对比不同方法的分类结果可以看出,可见光阈值法分类效果优于支持向量机,在支持向量机法分类中,错分、漏分情况较多。多光谱指数两者分类效果差别不大,即在多光谱指数分类的情况下,阈值分类、支持向量机2种方法都可以使用,而且支持向量机方法只需建立很少的训练样本,计算要相对简单快捷。
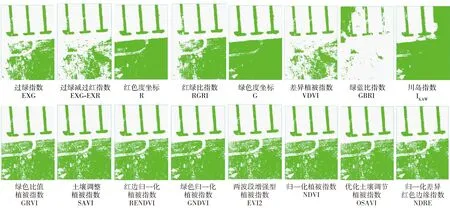
图4 可见光、多光谱植被信息提取结果(支持向量机)
3.4 精度评价
由同一验证样本,利用混淆矩阵对结果正确率进行验证,见表1。无论是阈值法还是支持向量机的分类方法,多光谱植被指数提取植被信息整体都有较高的正确率,Kappa系数>0.9。可见光植被指数分类结果中,阈值法要比支持向量机算法分类效果好,Kappa系数在0.9以上有3个,支持向量机都<0.9。在8种可见光植被指数中,G、R、EXG、EXG-EXR植被指数提取效果优于其他可见光指数,Kappa系数都>0.8。这与以往的研究结果[12]相符合。
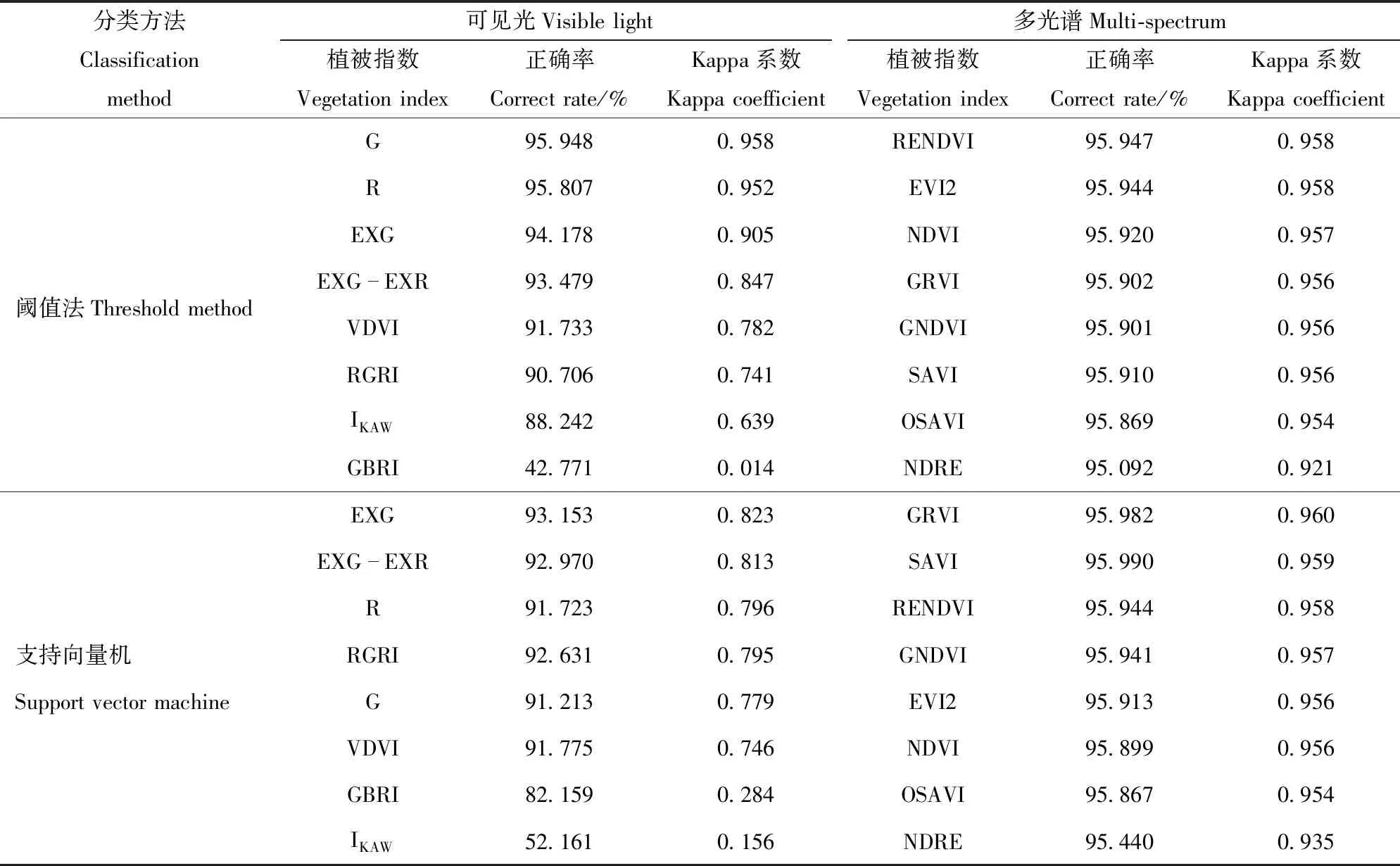
表1 植被信息分类精度评价
把Kappa系数>0.9所有植被指数进行排序(表2)。其中可见光植被指数有3种,即R、G、EXG,都是用阈值法进行分类。其他16个植被指数,都是多光谱植被指数,而且是由8种相同的植被指数(2种分类方法)出现2次构成。所以,在多光谱植被指数应用到植被分类中,提取结果与实际结果具有高度一致性,8种多光谱植被指数都可以很好应用,其中GRVI、SAVI、GNDVI、NDRE优选支持向量机法分类,RENDVI、EVI 2、NDVI、OSAVI优选阈值分类方法。
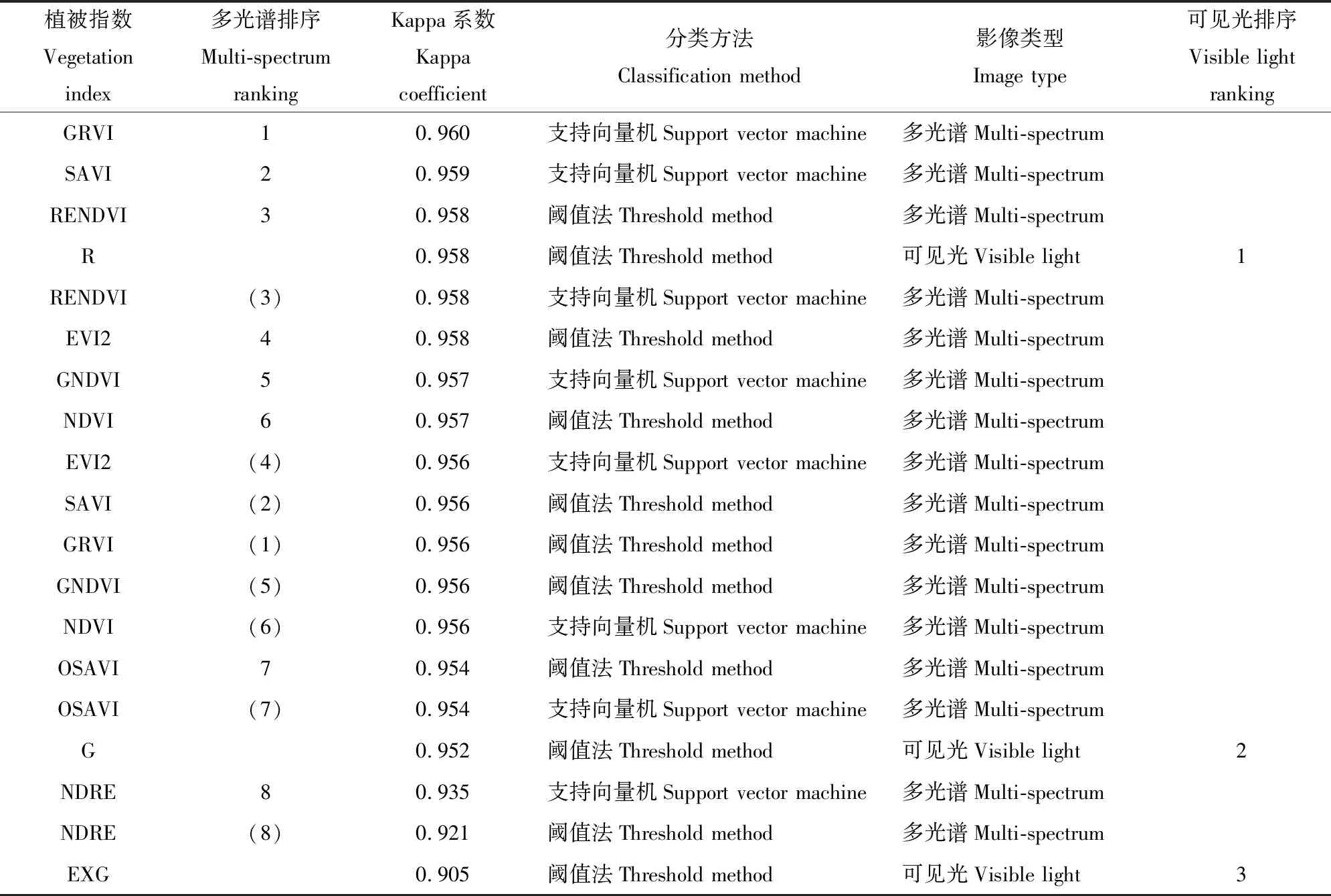
表2 植被分类精度结果排序
3.5 适用性评价及林草覆盖率计算
为了更好地验证植被指数及分类方法的适用性和准确性,选择3个研究小区(研究区2、研究区3、研究区4),选取可见光与多光谱数据源中精度较高各3种植被指数(多光谱GRVI、SAVI、RENDVI,可见光R、G、EXG)进行植被信息提取(图5)。3幅实验影像同一时间段拍摄。植被分类精度、林草覆盖率计算结果如表3。由实验结果可知,在研究区3、研究区4中,6种植被指数均获得较佳的分类效果,分类精度Kappa系数都>0.8,整体上多光谱要优于可见光。在研究区2中,单波段可见光G、R分类后存在明显的阴影区域,分类精度较低,而多光谱分类效果较好,没有出现此类现象。
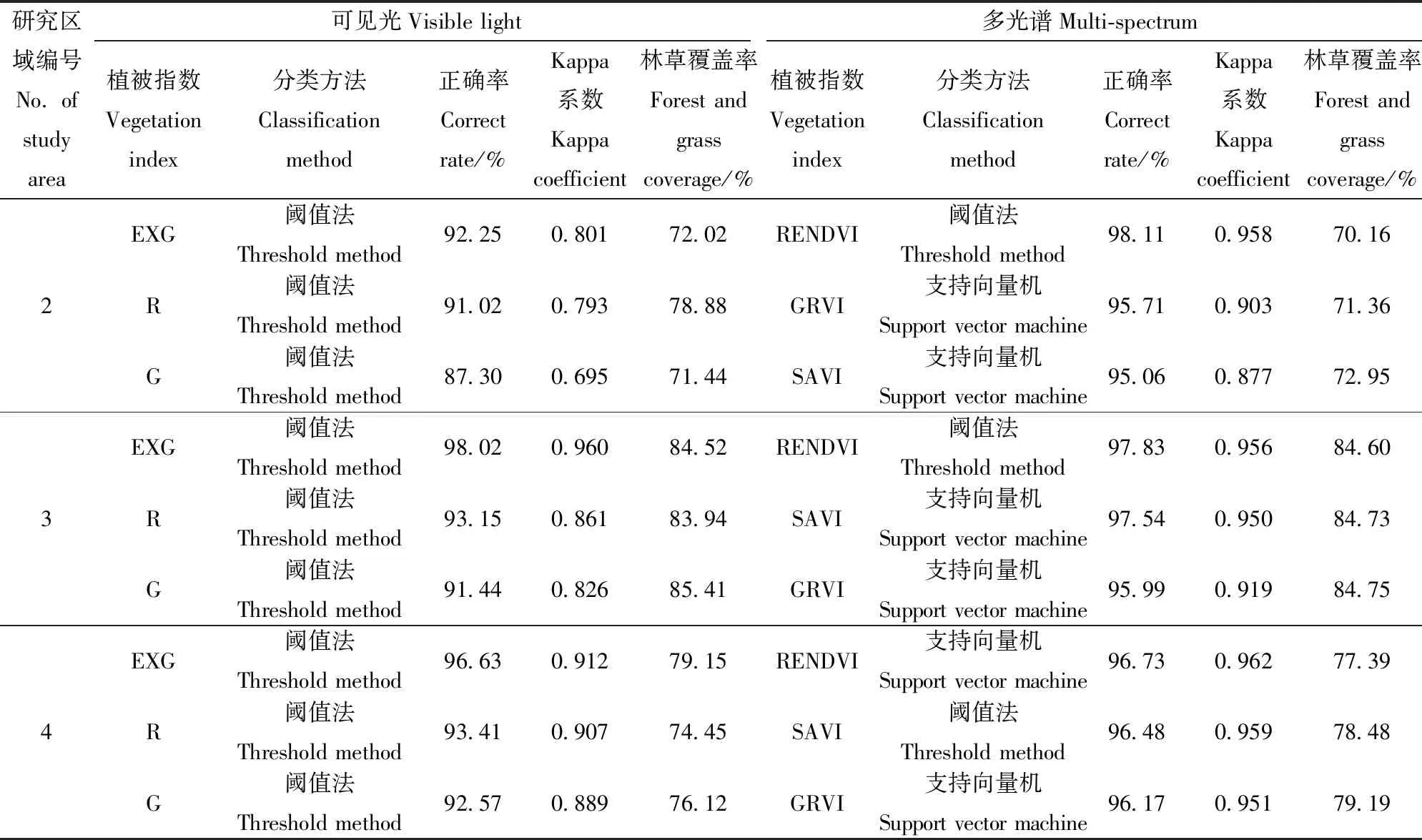
表3 植被分类精度评价及林草覆盖率计算表
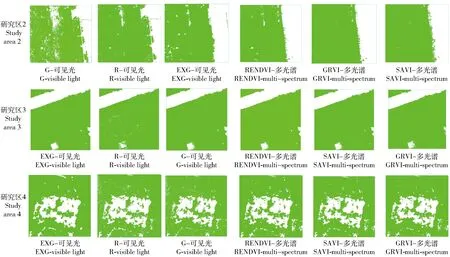
图5 精度较高指数的分类结果(可见光3种,多光谱3种)
在研究区2中(图6),由于乔木自身高度和太阳高度角的存在产生阴影,可见光G、R由于阴影的灰度值和植被内部灰度值有相同部分,将少部分树影信息错分为植被信息,影响分类结果。而可见光EXG和多光谱指数,通过波段处理减少阴影的干扰,使植被信息与其他信息在影像中区分更加明显,能有效地抑制乔木阴影信息,不会过多地造成错分现象。这和一些学者利用不同波段特性及波段运算方式,构建植被指数以增强植被信息达到消除阴影影响的研究非常相似[15-17]。虽然本研究选取的指数能去除阴影效果,但研究范围局限于1个研究区类型,其他场景能否使用有待研究。下一步在研究基础上可更深入研究构建“阴影消除植被指数”,以提高特殊情况下分类精度。
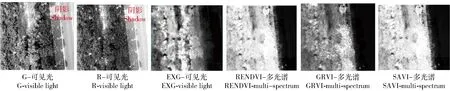
图6 研究区2植被指数图
综上所述,多光谱植被指数在3个研究区均获得较好的植被信息识别效果,具有较好的适用性和稳定性,其中RENDVI表现最优。可见光植被指数在正常的影像中可获得较好的识别,EXG表现最优。但存在阴影的情况下,单波段指数G、R区分阴影与植被相似的部分信息的能力较弱。所以在可见光应用中,在拍摄时间的选择上注意尽量避免阴影的产生。
4 结论
1)与同类研究相衔接,笔者选取16种植被指数(多光谱8种、可见光8种)提取植被信息,用混淆矩阵方式对提取精度进行验证,其中,8种多光谱植被指数和3种可见光植被指数的Kappa系数均为0.90以上。以上11种植被指数分类效果可满足实际应用需求,实现生产建设项目水土保持林草覆盖率准确计算。
2)面向对象的方法,能够充分挖掘无人机影像的大部分特征信息,有效实现对植被信息的快速、精准识别。阈值法的准确率大于支持向量机分类法。满足要求的11种植被指数中,多光谱植被指数分类的方法GRVI、SAVI、GNDVI、NDRE为支持向量机分类法,RENDVI、EVI2、NDVI、OSAVI采用阈值分类法;可见光植被指数R、G、EXG均采用阈值法。
3)在3个研究区适应性验证实验结果表明,在正常状况下,多光谱和可见光植被指数均获得较好的植被信息识别效果来计算林草覆盖率;在有阴影存在情况下,单波段可见光R、G有错分现象,可见光EXG和多光谱指数通过波段处理减少阴影的干扰。多光谱植被指数具有更好的适用性和稳定性。
