城轨车辆电制动滑行故障分析与优化策略研究
2023-10-27吴云飞陆远基
吴云飞,牟 蓉,陆远基,王 龙,刘 雄
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
目前城市轨道交通车辆常用的制动控制策略为常用制动和快速制动工况下优先使用动车电制动,电制动力不足时补充拖车空气制动。该整车制动力分配策略在全隧道线路以及地面与高架线路轨面条件较好时,动车电制动能按照动车黏着极限响应制动需求。但是在轨面条件恶劣时,可用黏着系数降低,2动2拖或3动3拖等编组形式的列车,整车制动力集中在动车上,容易发生电制动滑行。当电制动发生严重滑行时,动车电制动被切除,可能造成列车停站时对标不准,严重情况下,若空气制动不能及时补充,可能导致列车超速,触发列车紧急制动等。因此,对于列车编组形式为2动2拖或3动3拖、轨道条件为地面或者高架的城市轨道交通线路,在轨面条件恶劣时的车辆制动力的有效施加需要进一步研究与解决。
本文深入分析了国内某城市2动2拖地铁车辆在全高架露天线路上频繁发生电制动滑行故障的原因,提出了相应的优化措施,并通过试验验证了优化措施的可行性。
1 故障分析
气制动力不足的问题,统计情况如表1所示。
表1 车辆制动力不足情况统计
从表1中可知,故障现象均发生在下雨天,制动工况出现制动力突然减小的情况,严重时导致车辆超速,触发紧急制动。
2020年11月某城市地铁车辆频繁报出在下雨天
选取其中一起典型的制动力不足故障进行分析,A56车故障数据解析如图1所示。车辆初始制动级位为16%,电制动功能正常,M1车1、2位转向架的给定电制动力与发挥的实际电制动力均为6.6 kN。随后整车制动级位增加到30%,1位转向架的1、2轴开始出现抱死滑行现象,1、2轴轴速迅速降低,此时牵引控制单元(DCU)内部分配给1位转向架的电制动力为12.2 kN。
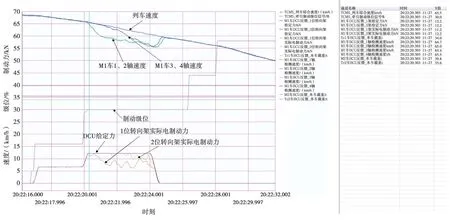
图1 A56车制动不良故障数据解析
从图1中可以看出,1位转向架发挥的实际电制动力曲线在DCU 防滑保护逻辑的控制下呈现波浪形,随后M1车2位转向架的3、4轴也发生滑行,直至电制动被切除。随着M1车电制动滑行现象的发生,实际发挥的电制动力不足以满足车辆的制动需求,因此从开始滑行到滑行持续4 s左右,车辆切除M1车的电制动,随后M1车制动由空气制动接管。
表1所示的其他车的故障数据均与A56车情况一致,在雨天轨面湿滑工况,给定制动级位由小转大的过程中,动车发生严重滑行后电制动被切除。该过程中由于电制动发生滑行,电制动切除后转空气制动存在一定的延时,以及空气制动响应延时等因素的影响,导致整车制动力不能满足车辆减速需求,严重时造成车辆超速触发紧急制动等严重事故。
2 电制动滑行机理分析
通过前文的故障数据分析可知,车辆制动力不足是由于电制动滑行以及滑行过程中产生的次生危害造成的,本节根据车辆黏着理论深入分析造成电制动滑行故障的原因。
2.1 车辆黏着理论
轨道交通车辆牵引力和制动力的施加是依靠轮轨之间的黏着作用完成的,牵引电机通过齿轮箱将转矩T作用于车辆轮对,由于黏着作用,在车轮与钢轨接触点产生切向力F。制动时车轮受力如图2所示。
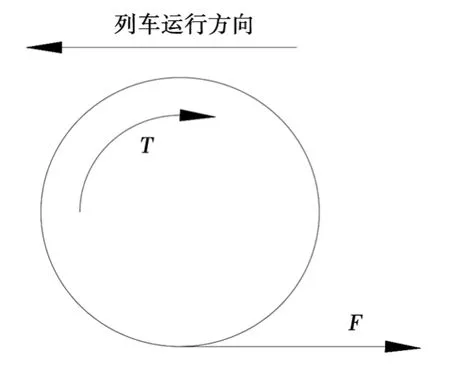
图2 电制动时车轮受力分析图
轮轨间能传递的最大轮缘制动力Fmax与列车换算质量m、轮轨最大黏着系数μmax的关系式如式(1)所示:
图3是根据多年试验得出的在不同轨面条件下的黏着系数分布图,从上到下依次是干轨、湿轨与湿滑轨。
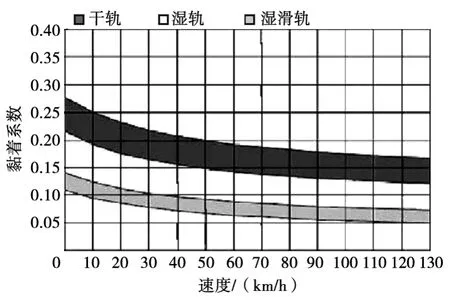
图3 不同轨面条件黏着系数分布图
本文研究的城轨车辆最高运行速度为80 km/h,从图3可以看出,速度为80 km/h时,干轨的黏着系数为0.14~0.18,湿轨的黏着系数为0.08~0.14,湿滑轨的黏着系数为0.06~0.08。列车在制动过程中需求的黏着系数超过当前速度下的最大可用黏着系数时就会发生滑行,造成列车制动减速度达不到目标减速度。
2.2 电制动滑行原因分析
根据2.1 节的分析,在雨雪天气、轨面湿滑条件下,可用黏着系数降低,列车发生空转滑行的概率增加。从表1的数据统计可以看出,列车发生电制动严重滑行导致电制动被切除的情况大多在速度超过55 km/h、制动级位由小转大的过程中。以表1 所示的A56车的数据进行分析,M2车质量为39.8 t,车辆制动级位为30%,计算可得整车制动力需求为48.6 kN,网络系统分配给M2 车的电制动力给定值为24.4 kN,列车开始滑行的速度为66 km/h。从数据波形可以看出,1位转向架首先发生滑行,发挥的制动力降到7.8 kN,然后尝试恢复,1位转向架在当前轨面条件下能发挥的最大电制动力约为7.8 kN。2 位转向架后续也开始滑行,在M2车电制动被切除前制动力降低的不明显,2 位转向架发挥的电制动力实际值约为10.9 kN。因此,M2车发挥总的电制动力实际值约为18.7 kN。计算可得M2 车需求黏着系数为0.063,M2车当前条件下可用黏着系数为0.049。经上述分析可知,M2车发生电制动滑行的原因是需求黏着系数大于当前条件下可用黏着系数所致。
2.3 电制动黏着分析
根据2.2节研究,发生电制动滑行的根本原因是制动时动车可用黏着系数小于需求黏着系数。本文研究的城轨车辆整车动力分配策略是优先发挥动车电制动,电制动不足时优先由拖车空气制动补充,车辆电制动特性如图4所示。
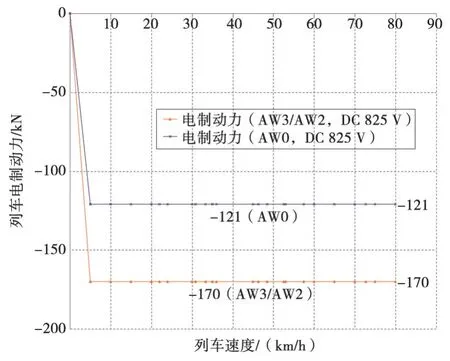
图4 城轨车辆电制动特性曲线
根据图4所示的电制动特性与动车质量可计算出电制动最大需求黏着系数,黏着特性参数如表2所示。
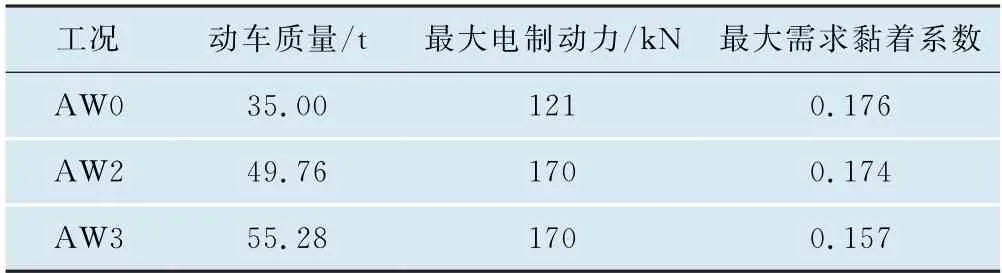
表2 电制动黏着特性参数
本文研究的城轨车辆100%级位下对应的制动减速度为1.09m/s2,不同载荷下100%制动级位下整车需求的制动力如表3所示。
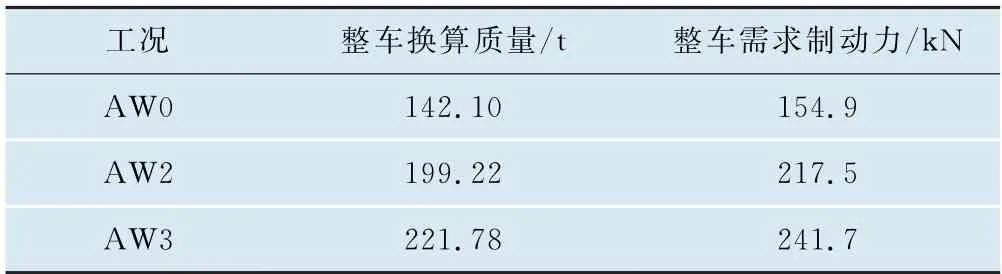
表3 100%制动级位下整车需求制动力参数
综合表2 与表3 的制动参数可知,AW0 工况、78.1%制动级位以下,整车制动全部由动车电制动提供,此时动车所需的最大黏着系数为0.176;AW2工况、78.1%制动级位以下整车制动全部由动车电制动提供,此时动车所需的最大黏着系数为0.174;AW3工况,70.3%制动级位以下整车制动全部由动车电制动提供,此时动车所需的最大黏着系数为0.157。根据表1可知,电制动开始发生滑行集中在制动级位上升到50%左右,此时AW0工况下动车需求黏着系数为0.113,占电制动最大需求黏着系数的64.2%,AW2工况下动车需求黏着系数为0.111,占电制动最大需求黏着系数的63.8%。
综上分析,本文研究的城轨车辆容易发生电制动滑行的原因是,整车制动优先利用动车电制动,在雨雪天气高速运行时,轨道可用黏着系数显著降低,当制动级位较大时,动车的需求黏着系数大于可用黏着系数,从而导致动车频繁发生电制动滑行故障。
3 优化措施与验证
3.1 优化措施
根据上述分析,需要减少雨雪天气轨面黏着不良条件下动车电制动力的发挥。因此,本文提出如下优化措施:
(1) 高速时列车可用黏着系数降低,为了避免高速大级位下的电制动滑行,将50~80 km/h的电制动包络线由恒力改为自然特性(图5)。
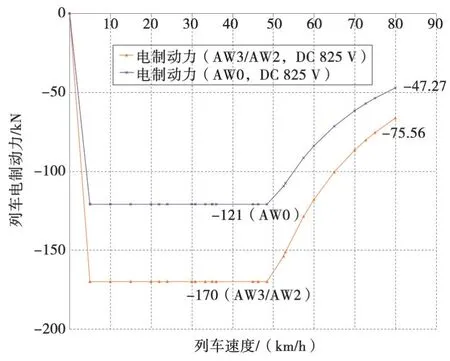
图5 优化后的电制动特性曲线
(2) 为避免雨雪天气动车出现电制动滑行,拖车空气制动不能及时补充而造成整车实际制动力不足的情况,在司机显示器界面设置“雨雪模式”软按钮。在雨雪天气,司机通过整车制动表现判断出制动不良时,按下软按钮,列车进入“雨雪模式”运行。根据前文的计算与分析,在“雨雪模式”下制动时,网络将整车制动力需求值乘以三分之二后的数值作为电制动力给定值发送给DCU 进行发挥,其余制动力优先由拖车空气制动补充。在雨雪模式运行时,动车电制动力的实际发挥值比原方案小,同时拖车空气制动提前介入制动过程,即使动车电制动发生滑行,空气制动也能迅速补充,可以避免制动过程中由于电制动滑行导致的制动力不足的情况发生。
3.2 试验与验证
根据上述优化措施更新网络系统与DCU 软件,并刷车进行试验验证。以A54车数据为例进行说明,A54车优化程序后的数据波形如图6所示。
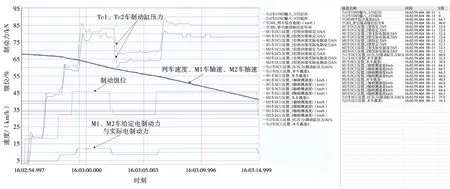
图6 A54车优化程序后数据波形
从图6可以看出,在列车速度为64.7 km/h制动时,开启了雨雪模式,此时制动级位为46%,根据级位与各车质量计算可知整车制动力需求为73.25 kN,网络分配给M1车的电制动力给定值为24.8 kN,M2车电制动力给定值为24.6 kN,总的电制动力给定值为49.4 kN,占总制动需求的67.4%。根据图5的电制动力特性曲线可知,当前速度下车辆能发挥的最大电制动力为81 kN,大于总的电制动力给定值,因此电制动力实际值按照总的给定值进行发挥,同时可看出拖车也进行了相应的空气制动补充。从速度曲线可知,在高速下制动时动车各轴速度与列车速度重合,未发生电制动滑行故障。
4 结论
本文针对2动2拖城轨车辆在雨天频繁出现制动力不足现象进行了分析,发现制动力不足是由于制动过程中电制动频繁滑行导致的,而引发电制动滑行故障的原因是在雨雪天气动车电制动的需求黏着系数大于轨面的可用黏着系数。综合分析轨道黏着特性、车辆制动分配策略以及车辆电制动特性等参数,提出了在高速时将电制动力包络线由恒力改为自然特性,并设置专用的雨雪模式,在雨雪天气网络将发送给DCU的电制动力给定值降为原策略值三分之二的优化措施。将牵引与网络系统软件优化后进行了刷车验证,结果表明,车辆在高速下制动时,动车各轴速度与列车速度基本重合,未再发生电制动滑行故障,整车制动效果良好。本文提出的优化措施对处理城轨车辆电制动滑行故障具有一定的指导意义。
