基于VisionPro 视觉的网纱定位系统设计
2023-10-27马会玲韩小港
马会玲,韩小港
(1.安图实验仪器(郑州)有限公司,河南郑州 450047;2.吉林化工学院,吉林吉林 132022)
0 引言
近年来,工业用诱导视觉技术日益完善,只要将视觉引导技术和工业机器人技术结合,利用通过视觉感应器所收集的图形信号,实现目标辨识和定向,就能够实现对多目标、不同部位的工件实现分类移动,将大大提高工业生产效率和制造业智能化水平[1]。所以,将视觉定位与机器人运动结合对于工业生产过程具有非常重大的研究意义和发展价值[2]。研究范围涉及RobotStudio 工作站建立及程序编写,确保机器人能够确定抓取摄像头保护壳模型并安装到手机模型处,还要运用VisionPro 软件确保能够识别照片x、y 坐标并且建立两个软件的通信,确保坐标的传递[3]。
1 实施方案
1.1 总体设计
系统设计根据工业相机视觉软件VisionPro 识别物料坐标信息,然后通过Socket 通信将坐标信息传送给RobotStudio 创建的装配工作站的工业机器人,机器人根据坐标信息分析出要抓取物料的坐标,进行抓取并完成装配手机听筒网纱的运动。
1.2 视觉定位
视觉定位系统采用康耐视VisionPro 视觉识别软件对相机采集的网纱图片进行识别,并定位位置坐标,目的是找出目标物在工业机器人基础坐标系上的坐标。设计采用一系列不同方向位置的网纱图片作为采集坐标位置的实验样本,通过VisionPro 中的CogImageConvertTool 工具将网纱图片导入,需要CogImageConvert 工具将彩色图像转换为8 位灰度图后才能传递给CogPMAlignTool1 工具进行模型训练[4]。传递给CogPMAlignTool1 工具后通过调整初始坐标来识别物体位置。在将图像输入到模板匹配工具之后,抓取一个训练图像作为模板进行训练。识别系统的建立如图1 所示,在显示模板匹配工具的图像缓冲区中的Current.TrainImage 将限定框移动至零件处并调整限定框的大小,使限定框刚好能够包裹住图片中照片,将限定框之内的区域作为训练区域,另外将训练的原点调至限定框的中心原点,这样有利于得出图片中物体的坐标。
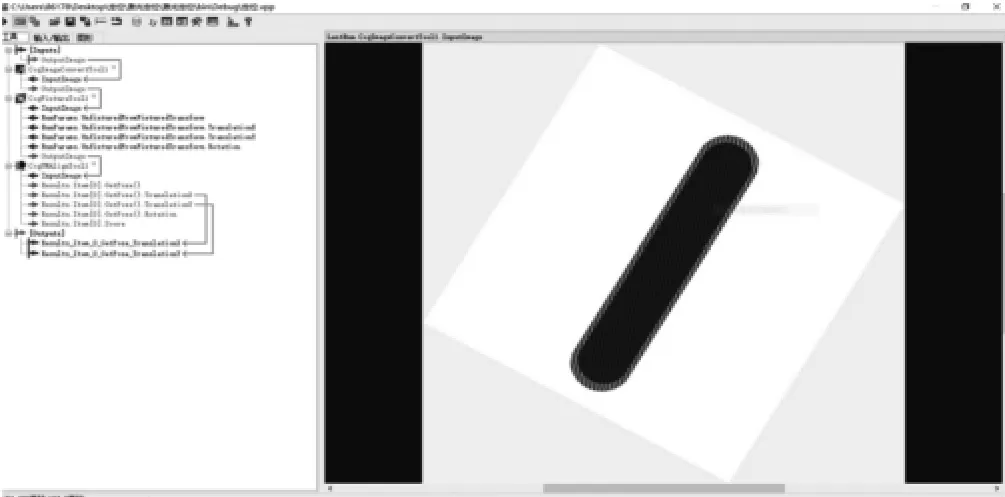
图1 识别系统的建立
通过训练识别出图片物料的坐标。确定好坐标信息后,通过Socket 通信将其传送给机器人装配工作站,坐标信息如图2所示。

图2 坐标信息
1.3 装配工作站仿真系统的设计
装配工作站是由ABB 的RobotStudio 软件构建工作站并编写程序进行模拟,工作站主要是由ABB IRB-120 机器人、工业相机、传送带、手机及其摄像头外部保护壳的模型、安全护栏、控制柜等组成,工作站的布局如图3 所示。
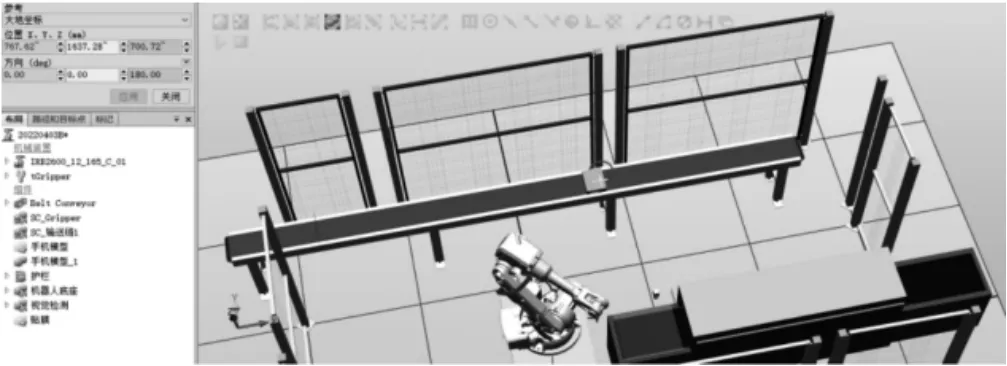
图3 工作站布局
该工作站需要通过建模菜单中的组件组、空部件和Smart组件等功能,将各部分建立成对应的组件组,并利用空部件模拟已装配好的鼠标模块,同时利用Smart 组成部分仿真机器人末端夹具运动以及对工件装配模拟。在DeviceNet 现场总线下创建机器人的I/O 和Smart 组件的I/O 信号关联,这时的Smart 组件就可看成是一种可以和机器人连接I/O 通信的仿真PLC 系统,利用在线开发工作站程式,就能够完成对实际工作站环境的整体模拟[5],工作站的逻辑属性设计如图4所示。
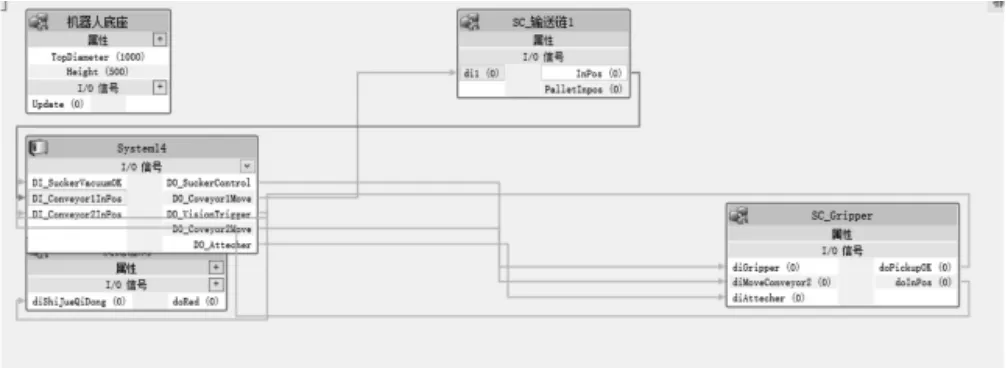
图4 工作站逻辑属性设计
1.4 VisionPro 与RobotStudio 的通信
该系统在VisionPro 与RobotStudio 工作站之间建立通信来进行坐标信号的传递。将ABB 机器人作为客户端,视觉软件做为服务端,当视觉软件接受M 信号后,视觉软件将识别物料的坐标信息传送给ABB 机器人,然后机器人再执行后面的指令。建立视觉软件和机器人工作站的通信,需要将机器人和视觉软件之间的端口和IP 地址设置相同。视觉软件需要将坐标输出设置为CCD0x,y/0D 的形式,需要进入通信管理器改写TCP/IPD的后缀,改变坐标信息后缀如图5 所示。其中的其中/0D 是字符停止的符号,需要点开VisionPro 的配置,将其中IP 在输出后缀改成/0D,来确定输出的是CCD0x,y/0D 的格式。将视觉软件和RobotStudio 中工作站的端口号改为6000,然后将两个软件的通信地址改为本地的IP 地址。便可以将坐标信息传递给机器人了。
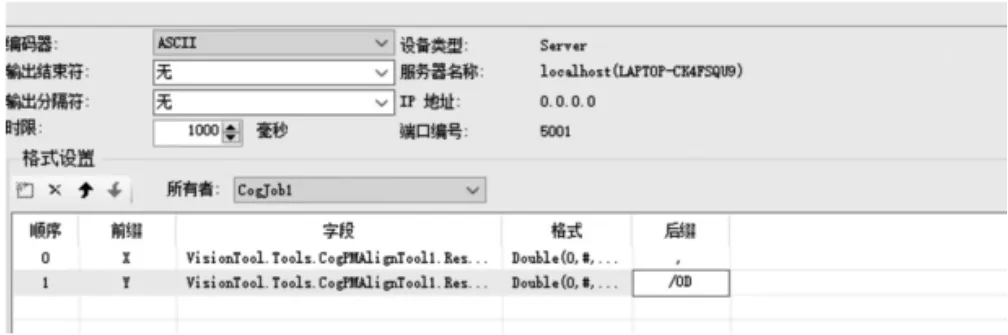
图5 改变坐标信息后缀
2 实验
系统的实验采用VisionPro 软件提取物料的坐标位置,通过建立Socket 通信传送到RobotStudio 搭建的装配工作站中,通过机器人的编程、Smart 组件的设置、工作站的逻辑等最终控制机器人完成手机听筒网纱的装配。
通过Visual Studio 编程制作一个照片导入窗口(图6),将图片导入窗口后由VisionPro 识别,点击网络链接,将窗口内的IP地址和端口改为与RobotStudio 工作站程序一致,IP 地址设置界面如图7 所示,点击链接按钮,将坐标信息传给装配工作站的机器人。机器人根据解码程序和抓取运动程序,配合工作站逻辑完成手机听筒网纱的装配。

图6 导入图片窗口
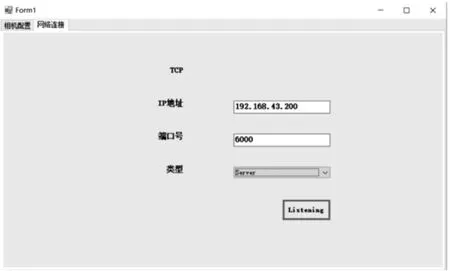
图7 设置IP 地址
3 结束语
通过VisionPro 软件与RobotStudio 软件相结合,分别设计识别物体坐标系统,搭建以机器人为主的自动化仿真模型,并将SolidWorks 建立的工件模型导入RobotStudio 来搭配机器人完成工作站,设计仿真系统和仿真调试工作逻辑与系统程序。把VisionPro 识别的坐标信息通过Socket 通信传递给机器人。通过离线模式下编写调试程序,在线运行控制器程序。这种模式能够广泛适用于以工业机器人为主的生产线的仿真模拟,可以降低企业的投资风险,能够更快速地设计出令客户满意的工作站实施方案。