基于双层耦合网络的无人集群分布式系统模型*
2023-10-25沈宇婷高跃清
沈宇婷,孟 新,高跃清
(1.中国科学院国家空间科学中心,北京 100190;2.中国科学院大学,北京 100049;3.中国电子科技集团公司第五十四研究所,石家庄 050081;4.河北省智能化信息感知与处理重点实验室,石家庄 050081)
0 引言
无人集群作为面向未来战场侦察监视、目标打击等任务需求的重要力量和作战样式,须具备有人/无人一体化的自主运行、动态调整、聚合解聚与平滑过渡能力[1-2]。这要求无人集群能够以个体自主规划决策为基准,实现个体对环境的及时感知、来源的有效甄别、信息的融合采信和决策的多场景适应,并支持无人自主和有人/无人编配的多模式快速匹配。以典型无人装备无人机为例,无论小型集群化平台还是大型综合性平台,信息的获取感知、信息的共享交互都是无人机任务场景中必须具备的基础能力[3]。通过美军对各型无人机的军事需求排序分析[4-7],小型平台主要需应用于范围广阔、条件复杂且危险度较高的场景,兼顾了无人自主和有人/无人编配的典型能力需求[8-9],可作为研究无人集群系统的典型样式,具备较为广泛的借鉴意义。陈杰院士和辛斌博士提炼了设计面向实用化的无人集群系统需要解决“面向任务的协同能力建模与自主编配规则建立”、“局部信息获取条件下,指控系统体系结构优化设计”、“指挥控制体系的抗毁性和动态可重构架构设计”等基础科学问题[10]。综合小型平台集群系统军事需求,解决上述问题的关键在于,无人集群系统设计架构需要满足信息感知获取后,安全、动态、自主化运用这些信息,以达成协调保持有生任务力量的目标。基于时效、鲁棒性和动态适应等实用化目标的均衡,有必要探索能够结合运用、兼容并包无人集群控制模型与方法架构,以期有效融合中心式与分布式决策的优势。
本文基于信息交互视角,围绕无人集群分布式系统的任务协同和自主性产生的重点,通过面向信息交互的无人集群系统解耦需求分析,进行了横向解耦与纵向解耦的机理分析,据此设计了面向系统信息交互网络演化的CDLW 与H-CDLW模型,为构建双层耦合网络的无人集群分布式系统模型提供了基于信息交互行为、面向信息共享利用的演化控制机制。同时,基于双层耦合网络的集群系统模型,针对无人节点的自主状态控制、目标信息融合与目标拣选进行了适配的算法设计,并进行了实验验证与分层解耦后网络特性的分析,实验结果表明基于双层耦合网络的无人集群分布式系统模型具备作为系统控制框架的基础,能够为实现时效、鲁棒性和动态适应等实用化目标的均衡提供新思路。
1 面向信息交互的无人集群系统解耦需求分析
面向信息交互的无人集群系统解耦,主要针对无人集群系统实用化研究,以信息交互为关注重点,将每个无人机节点抽象为智能体,把节点间任务协同关系映射为智能体之间基于连接关系实现的群组控制问题。具体地,以智能体信息交互关系的建立和断开控制形成的动态连接,来模拟实际无人机集群内部的通联关系状态和变化,建立信息交互视角下,集群行为特征分析和机制模型研究的基本方法框架,目标形成面向集群信息交互构建一般化协商规则(即信息的分层、信息的传递、信息的知悉控制等),以及面向无人机节点的通用化控制策略(即信息的融合采信、目标信息的拣选、信息交互能力上节点状态的变化等),面向系统实现信息交互的鲁棒性增强和负载优化,形成无人集群系统实用化系统信息交互与控制的基础框架。
虽然上述基本思路可从宏观(系统、集群)、中观(群组、编队)、微观(个体、平台)清晰地划分出由信息交互与控制视角触发的具体问题,并回应牵引性基础科学问题。但在实际构建微观、中观和宏观模型与机制的过程中,存在解耦过程中的大量实用化需求响应难点,具体分析如下:
1)动态性:无人集群系统实用化一定面临高动态性场景。首先,这种高动态性体现在信息动态变化和与预期偏差的程度大,在无人集群系统的实际作业过程中,动态变化的发生和影响必然是仿真训练和专家规则难以完全模拟和精准筹划的。其次,高动态性体现在可能发生变化的信息维度及其具体内容的广泛程度,尤其在实用化思路上,无人平台需要具备独立自主作业能力时,对动态变化响应的能力就显得尤为必要。
2)自主性:无人集群系统的实用化必然需要自主作业和自主协商能力。以无人机集群为例,往往由小型平台构成,其单一平台的可装配的载荷和存储计算能力都有限,就需要尽可能消减单个平台在面临动态环境、复杂问题、缺乏后方算力和指挥等支援条件下的潜在负载。同时,这种负载表现在存储、计算、通信等多个维度上,使得找到负载降低的关键问题重要而困难。
3)鲁棒性:无人集群系统的实用化必须持续进行鲁棒性的提升。在前述分析调研过程中可以看到:一方面无人机集群主要面临的场景是相对危险系数和对抗性更高的场景,对系统的稳定运行、算法的多样化场景适配有着很高的要求。另一方面,无人集群随着能力需求的增强,人机需要面临的任务协同的具体样式也随之增加,不是单一样式控制算法,或类似仿生的具体问题具体分析可以解决的。针对这些问题就需要明确已有规则算法、模式匹配的成果,如何能够在兼顾成果集成的角度,同时拥有一套持续完善的方法框架,不断提升稳健运行和算法模型持续集成的水平。
4)匹配性与可扩展性:无人集群系统的实用化方法设计需要兼顾多方面匹配的扩展性。这里由于匹配性和可扩展性的紧密联系,故合并分析。其实匹配性要求一方面在于无人集群系统自身和多个无人集群系统间的系统体系、协同组织、个体平台在设计架构上需要保持一致的设计原则,另一方面在于与现有有人系统和未来体系之间的匹配。因此,对匹配性难点的思考就需要找到发展中相对稳定的要素,进而破解展开研究,形成具备良好扩展和适配能力的控制框架和模型架构。
因此,基于上述需求响应难点,面向信息交互的过程进行无人集群系统的控制机制解耦要点,需要具备面向任务的协同自主、基于局部信息的系统优化和控制体系的动态可重构等设计要素,重点关注协同过程中系统的一般化演化规则及其结构特性、局部交互特性分析,以及一般化、可扩展控制架构设计,使得解耦后的模型框架既能够具备基本的信息交互控制能力,又能够集成必要的算法模型实现动态扩展。在这个过程中,对通信组网、运动控制、信息融合、态势评估等多个方面的模型需要能够具备相对独立,又能够关联耦合的控制,就需要选择合适的分层解耦方式,为差异化算法模型的集成与融合提供条件。
与上述需求不能完全适应的是,现有研究主要仍关注于特定优化、分配、规划、调整、融合的算法设计,即便各领域已颇为深入、成果丰硕,但在为差异化算法模型的集成与融合方面,仍需研究并提炼设计出具有共性支撑能力的架构与机制。为此,本文研究旨在从信息交互视角出发,根据上述基础性科学问题,找到无人集群系统合适的解耦方式,如图1 所示。以网络信息交互、局域信息决策和交互负载优化为重点内容,构建一种可支撑实现下述能力的基础性系统模型,包括:1)一般化交互机制,为按需装填专有决策模型或控制算法提供基本结构;2)通用化控制策略,为多源信息收集与处理提供基础去冗和评估能力;3)形成决策传播效应,为动态自主力量编配和效能优化提供底层机制。最终,面向未来无人集群系统形成“系统基本体系架构”、“平台节点基础功能模块与结构”、“信息交互协调机制”、“面向动态任务的基本协同机制”和“系统信息交互负载动态优化机制”提供一定的解决思路和实践参考。
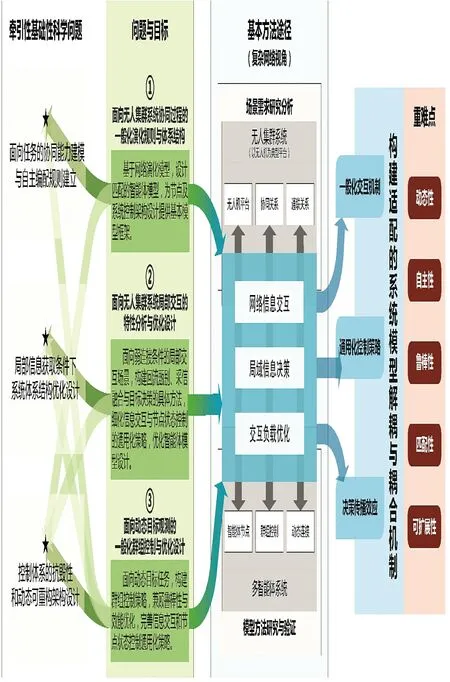
图1 解耦需求分析思路与重难点概要示意图Fig.1 Outline diagram of decoupling demand analysis ideas and key difficulties
面向信息交互的无人集群分布式系统解耦,是将物理运动、通信组网和任务规划层进行逻辑上的解耦,重点在于信息交互与传播的视角。所以在下面的网络演化模型研究中,采用先横向解耦再纵向解耦的思路,先提出一层网络的演化机理研究,分析基于候选局域动态世界(candidate-dynamic-local-world,CDLW)的无人系统网络演化动力,再提出面向无人集群系统的网络层次化分层控制思路,分析构建层次化候选局域动态世界(hierarchi cal-candidate-dynamic-local-world,H-CDLW)的无人系统网络演化动力,支撑面向无人集群系统的多智能体系统网络模型设计。
2 基于CDLW 的无人集群系统网络演化
2.1 基于改进LW 模型的横向解耦演化动力
横向解耦从信息交互与传播控制角度出发,将物理运动、通信组网和任务规划纵向耦合成一层,分析无人集群系统在认知迭代特性、信息聚合局部特性和整体过程动态耦合特性方面的演化动力,据此基于局域世界网络模型(local-world,LW)进行设计。综合考虑,LW 模型发展基础是BA(barabasi-albert)无标度模型,主要规则基于增长与优先连接特性,难以平衡局域信息决策与交互负载优化。因此,本节主要改进并分析基于候选动态局域世界的演化动力及要素[11-13],为2.2 节改进设计相关演化模型提供支撑,具体如表1 所示。
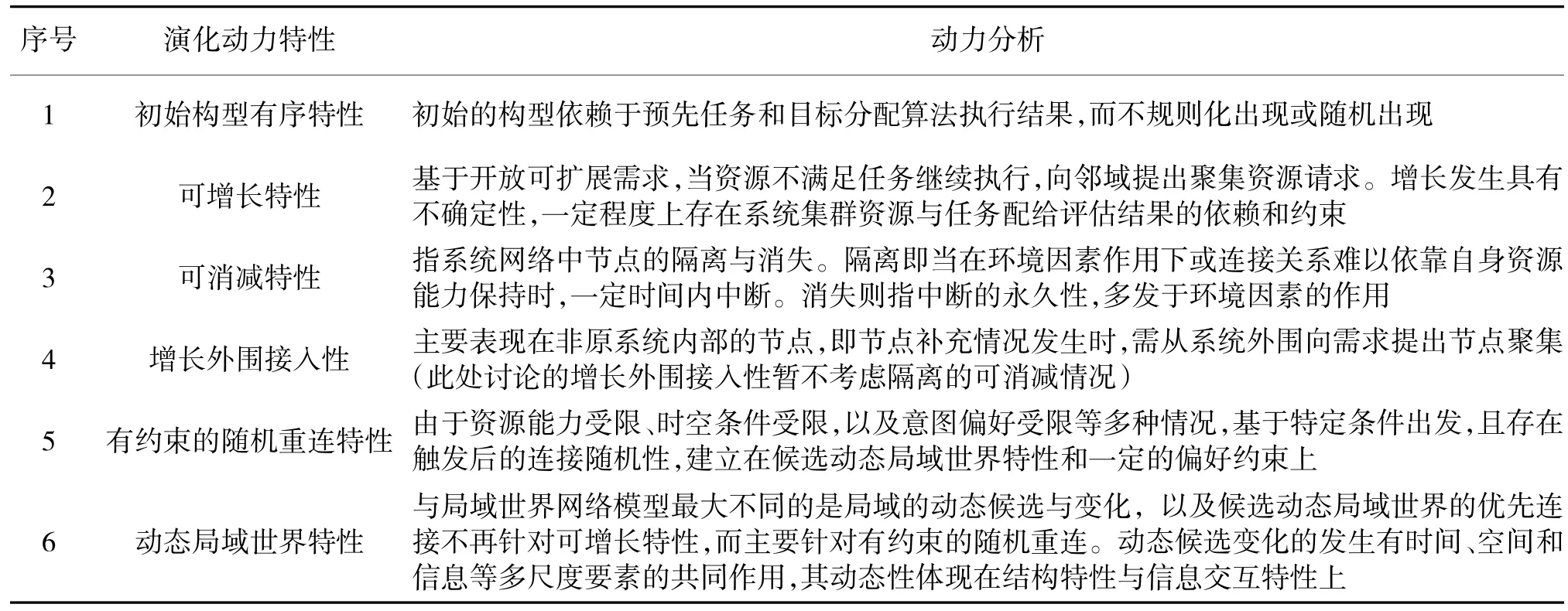
表1 基于候选局域动态世界(CDLW)的演化动力Table 1 The evolutionary dynamics based on candidate-dynamic-local-world(CDLW)
此外,有约束的随机重连中有一类重要触发条件为节点消减,由于其与群组和个体策略控制紧密相关,不作为基础控制模型研究重点。同时,上述“外围”虽主要指物理域时空范围,但并不排除密度稀疏情况。
2.2 基于CDLW 的无人集群系统网络演化模型
从无人节点个体间的信息交互行为来看,根据无人集群分布式系统应具备的基本特性设计基于CDLW 的无人集群系统网络演化模型构造与演化算法(如算法2-1 所示)。具体地,面向无人平台节点个体间信息交互控制,进行局部信息交互决策与交互负载优化设计,提供个体节点间相对独立的自主协同演化机制。
然而,无人系统各节点同时处在时间、空间和交互信息等多维度综合作用下,为实现通信组网、目标信息融合、运动控制等不同算法模型的动态可扩展、可重构,还需针对上述算法涉及的常见要素,进行要素分析与分层解耦,从而实现无人集群系统模型从架构和机制设计上的匹配性与可扩展性的兼容。
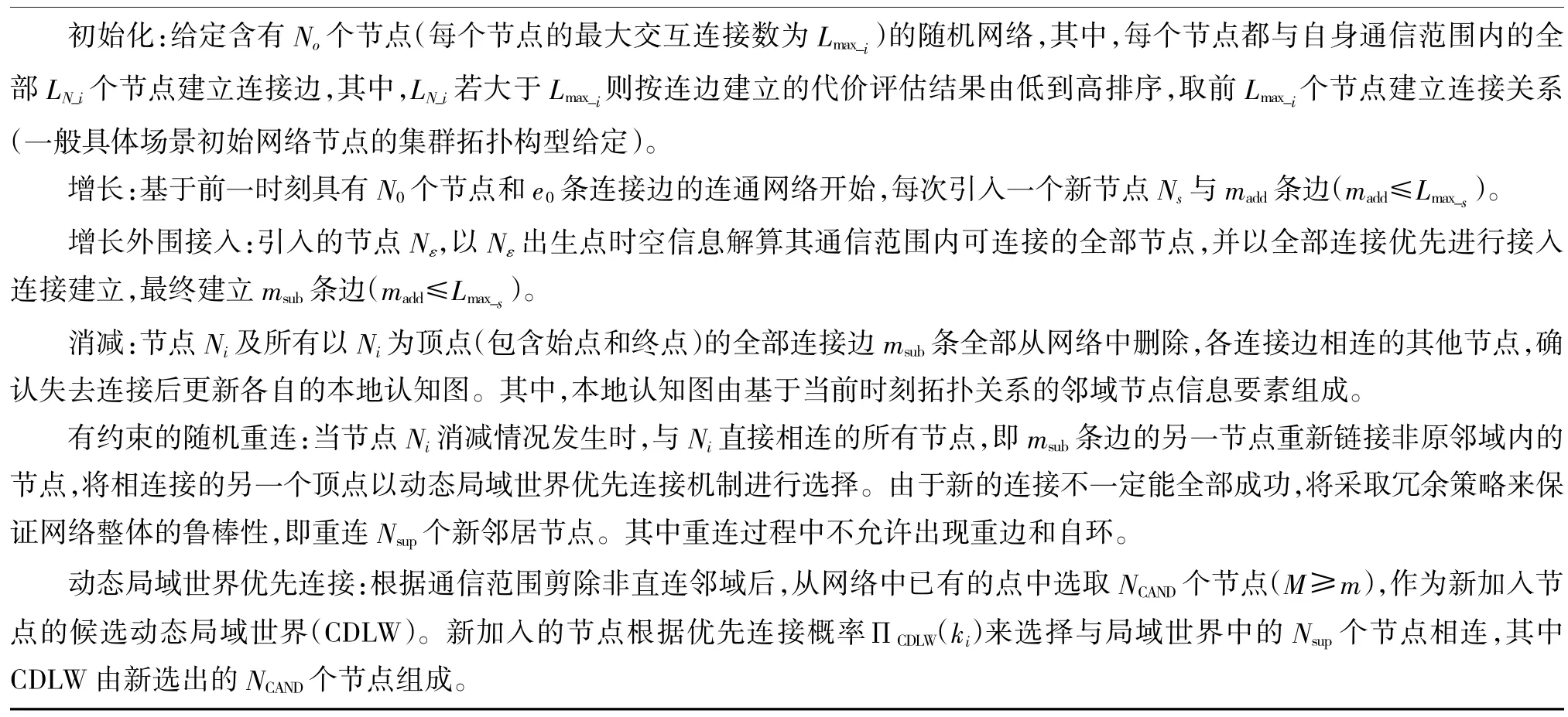
算法1 基于CDLW 的网络构造与演化算法
3 基于H-CDLW 的无人集群系统网络演化
3.1 无人集群系统层次化解耦机理分析
面向无人集群系统的网络建立,需要考虑时间、空间以及交互信息等3 个维度的综合作用。而对任意一个系统来讲,时间与空间是统一的,各个节点之间共享同一片时空分布的空间。也就是说,无论是任务规划与控制层面、通信组网层面,还是具体到某个无人节点的物理控制律,都是在相同的时间与空间尺度调节中状态一一对应的。那么若想实现不同算法模型的动态可扩展、可重构,层次化解耦的方式就无法从时间和空间的维度上进行划分。所以,本文选取针对信息交互维度,展开层次化解耦的机理分析,通过研究信息交互的内容范畴,结合无人集群系统信息交互维度的层次要素,得出层次和解耦的思路和方法。
3.1.1 信息、信息交互与传播
克劳德·艾尔伍德·香农将信息定义为:“信息是用来消除随机不确定性的东西”。诺伯特·维纳将信息描述为:“信息是人们在适应外部世界,并使这种适应反作用于外部世界的过程中,同外部世界进行互相交换的内容和名称”。实际上,信息交互就是指感知与反馈交替中,消除不确定性的适应过程中,发生的内容交换。所以信息交互从过程上分为发出与接收。因此,可从以下要素来描述分析信息交互,即信源、信宿、信道、内容、噪声与评估(即反馈),则信息传播就是信息在交互中获得时空范围上扩散的现象。
3.1.2 基于信息交互的层次要素分析
基于信息、信息交互与信息传播的理解,具体到任务规划与控制层面、通信组网层面和节点控制律(动力学)层面,从上述六方面的要素来分析,各层之间存在如表2 所示的特征与关联。由于信息交互的目标是为决策提供信息,故表2 的分析中补充了信息交互的决策部位。

表2 基于信息交互的层次要素分析Table 2 Hierarchical elements analysis based on information interactions
3.1.3 基于信息交互的层次化解耦思路
综上分析,面向无人集群系统的分布式网络拓扑模型,至少受时间、空间与信息交互三尺度的耦合关联影响。由于时间与空间是多层次统一一致的,因此,主要选择基于信息交互要素分析进行层次解耦。从物理运动层、通信组网层和任务规划与控制层,由下至上交互的信息内容是逐层约束,由上而下交互的信息内容是逐层解算的目标输入。同时,从信息交互的要素分析上看,由于时空分布限制对组网规划、流量控制、路由选择等算法的强约束,通信组网的控制物理上强依赖于物理运动。因此,在基于信息交互及传播的层次解耦上,将通信组网和物理运动统一成时空分布层,完成运动控制和连接的保持,为任务层提供基本的拓扑构型。而任务层则独立解耦成为交互决策层,主要关注以任务分配、资源部署为目标的信息交互行为的产生与信息传播的动力生成[14]。据此,基于CDLW 的无人集群系统网络演化模型将划分为交互决策层和时空分布层。其中,时空分布层为反馈响应层,交互决策层为牵制层。当无人节点进行信息交互及决策时,牵制层的决策输入影响反馈响应层,即可将无人集群看作物理上的单层网络、逻辑上的双层耦合网络结构。从而提供不同动力学模型的解耦框架。实际运作过程中,下层对上层的约束,可以看作是一种牵制。例如,在无人机碰撞检测等方面也应作为信息的输入层,影响上层的信息交互决策过程。所以这种双向的实际牵制,就成为反馈和相应的耦合循环。同时,运动学模型和信息交互动力学模型均可细化解耦,将双层网络拆分出更多的层次,再通过层次之间的耦合关系和层间的信息流动等,真实化模拟无人集群的个体行为、群组行为和集群行为等微观、中观、宏观各个尺度下的行为机理。
3.2 基于层次化解耦改进的H-CDLW 网络演化动力
纵向解耦主要从信息交互分层出发,分析物理运动、通信组网和任务规划等不同逻辑层信息交互频次、内容之间的相对独立性,以及这些信息交互存在的耦合关联。因此,可将基于CDLW 的网络演化模型进一步纵向拆解,构建基于层次化候选动态局域世界(H-CDLW)的网络演化模型,并进一步分析其演化动力与机理,形成相应的网络演化机制。对横向解耦结果一一纵向解耦的动力分析如表3所示[14-16]。
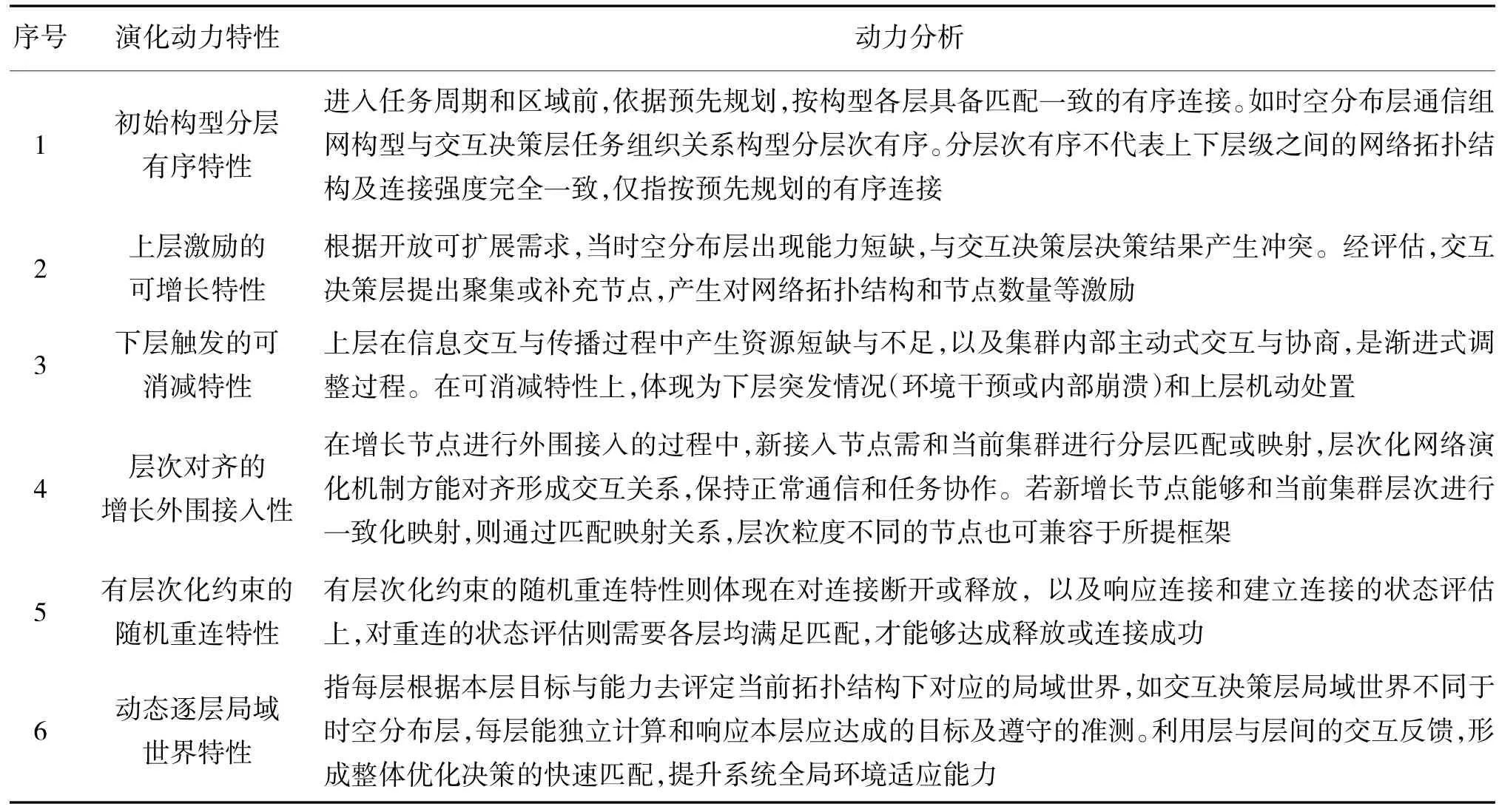
表3 基于层次化候选动态局域世界(H-CDLW)的网络演化动力Table 3 The evolutionary dynamics based on hierarchical-candidate-dynamic-local-world(H-CDLW)
3.3 基于H-CDLW 的无人集群系统网络演化模型
基于前述分析,为实现通信组网、目标信息融合、运动控制等不同算法模型的匹配性与可扩展性的兼容,无人集群系统模型从架构和机制设计上应具备的基本特性,以及据此构造的基于H-CDLW 的无人集群系统网络演化模型构造与演化算法(如算法3-1 所示)。具体地,面向时间、空间与信息交互解耦,重点关注兼容匹配性和可扩展性,提供个体间不同尺度控制相对独立的协同演化机制,即基于双层耦合网络的基本模型。
4 面向多目标融合拣选的H-CDLW 层次化交互控制
4.1 基于H-CDLW 的无人集群双层耦合网络模型
基于H-CDLW 的网络解耦实现了时空分布与交互决策解耦的基本框架,基于H-CDLW 的无人集群双层耦合网络示意如图2,更为复杂解耦方式可据此进一步纵向解耦。这种基于双层耦合网络的解耦方式,形成自顶向下系统构建方法,依据信息交互和传播需求多尺度解耦,将实际行为产生与决策生成的分析和控制分离,使得行为产生能够基于实际物理环境的可实现能力进行表征和计算,而决策生成能够基于实际任务协同关系的动态需求进行表征和计算,动态可控地聚合集群的通信、感知、行动资源。同时,这种分离有具备实际物理关联的基础,可通过一定的约束设计,为分离后的耦合提供具备匹配性的基础性架构,为行为产生与决策生成的层间约束抑制与激励提供可扩展设计基础。
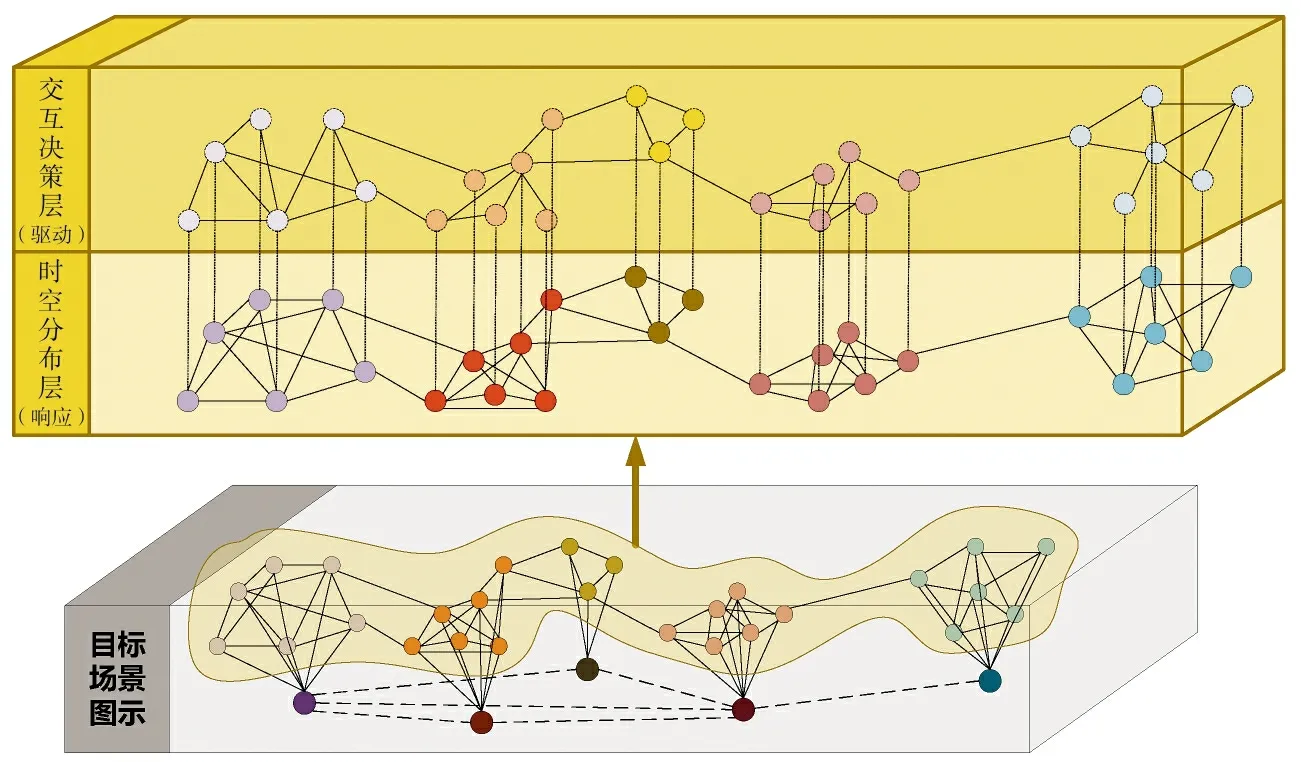
图2 基于H-CDLW 的无人集群双层耦合网络示意图Fig.2 Diagram of double-layer coupled network of unmanned cluster based on H-CDLW
需要特别说明的是,本文所提分层解耦的方式,并非将无人集群系统按控制、规划、协作、通信等计算内容不同,对算法模型的计算内容进行简单分层组装和输入输出的关联,而是从无人集群系统需要具备个体能力出发,提出了一种面向个体信息感知、信息融合、信息决策和信息传播的、具备分层耦合特性的一般化机制和框架,从信息交互的角度上为不同计算内容算法模型的耦合提供一个兼具匹配性和可扩展性的容器,为无人集群实用化的自主性达成等提供基础支撑。
4.2 面向多目标融合拣选的H-CDLW 层次化交互控制算法设计
面向多目标融合拣选的H-CDLW 层次化交互控制算法设计中,任一无人节点Ax的目标信息融合模块位于时空分布层,对t 时刻通过直接观测和集群通信得到的目标信息进行自动融合处理,生成可观测目标序列Ix(t),交由交互决策层的目标拣选模块进行待观测目标的拣选。当时空分布层的目标信息融合模块未收到任何直接观测和集群通信得到的目标信息时,若无人节点Ax此时不存在观测目标,则该节点按照基于H-CDLW 的无人集群系统网络构造与演化算法,进行自由态漫游。算法设计主要是针对智能体每步中观测-评估-融合-筛选-状态变迁决策的控制方法,概要算法流程设计如算法4-1 所示。
设计中,级联目标信息融合和级联目标拣选分别基于时空分布层CDLW(LUst-CDLW)和交互决策层CDLW(LUid-CDLW)进行计算评估[17]。观测融合基于实际系统通信交互能力评定,目标决策基于邻居节点传播信息意图的实际信息传播行为评定。层次化通过层间信息交互的抑制和促进,保留可扩展的解耦机制。
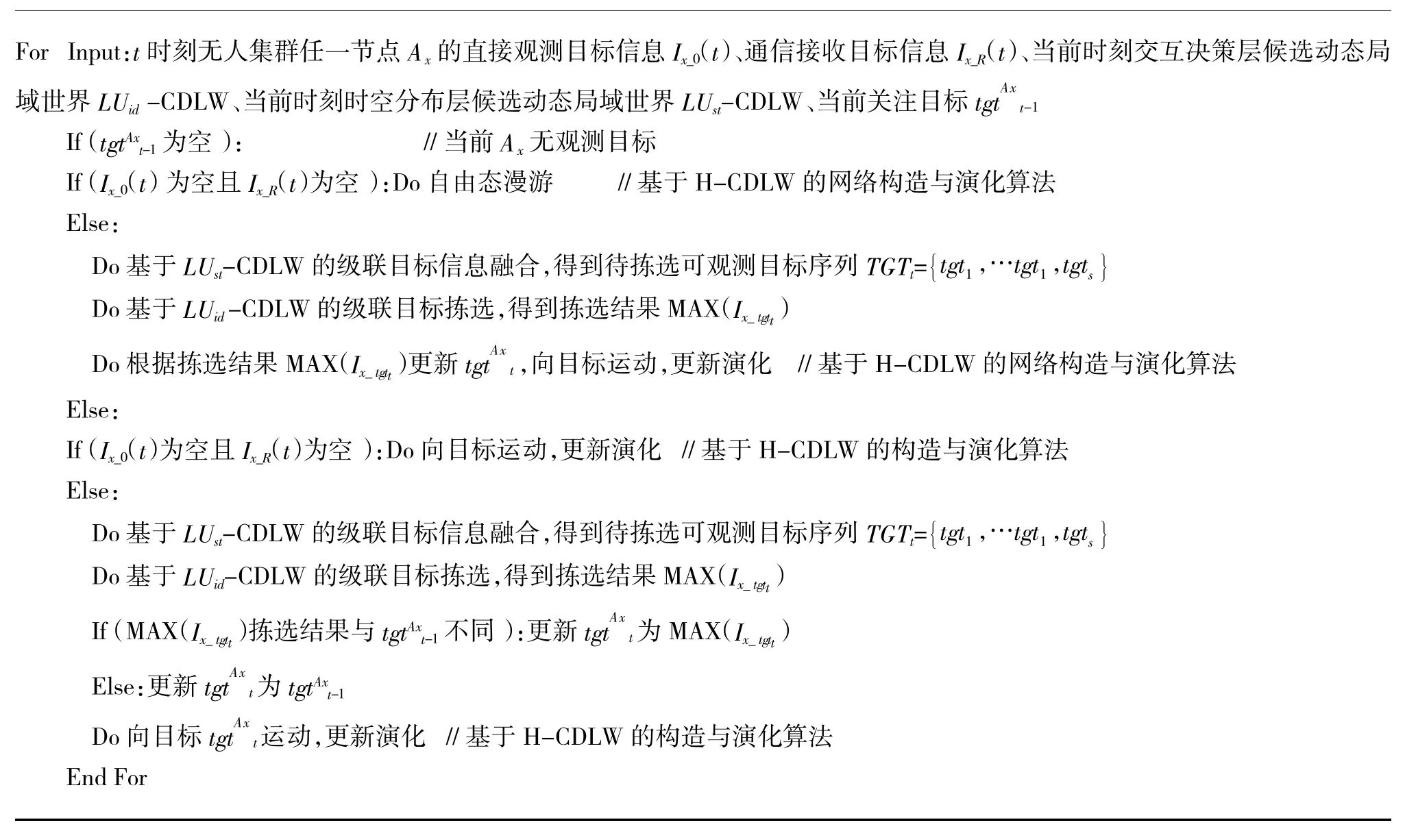
算法3 面向目标融合拣选的H-CDLW 层次化交互控制算法
4.2.1 基于LUst-CDLW 的级联目标信息融合方法
无人平台节点Ax基于LUst-CDLW 的时空分布层邻域为Γx(t),对邻域通信收到的目标信息进行基于级联拓扑交互特征分析的目标信息融合,计算与任一时空分布层邻居节点Ai的级联拓扑关联度Ex-i,具体地
Ex-i=a1CDx-i+a2Clx-i

对通信接收目标信息融合结果,进行遍历修订,若直接观测目标序列和融合结果I(xt)存在相同目标,且该目标在两个序列中信息差处于预设误差阈值范围内,则以直接观测目标序列观测值更新修订该目标I(xt)序列信息融合结果,反之不修订。最终根据遍历修订后I(xt)排序得到s 个目标可观测序列,即为待拣选序列TGTt= {tgt1,…tgt1,tgts},推送至交互决策层,再根据逻辑拓扑交互情况进行级联目标拣选。
4.2.2 基于LUid-CDLW 的级联目标拣选方法
在目标拣选过程中,若t 时刻,任一无人节点Ax待拣选目标序列TGTt= {tgt1,…tgt1,tgts},则基于LUid-CDLW 交互决策层邻域拓扑,对可观测目标序列进行基于信息交互评价的收益- 代价评估取最值后拣选。
其中,MAX(Ix_tgtt)为目标拣选筛选最大值的函数,Ix_tgtt是节点Ax对s 个待拣选目标序列生成相应的收益-代价评估结果序列,则为序列中的任一目标评估结果,具体地
其中,e1、e2、e3和均为可调权重值,IRERl为目标更替抑制因子。若Ax当前有关注目标且tgtl为已关注目标,则抑制因子失效,即IRERl为1;若Ax当前无关注目标,IRERl=ft(tgtl)为按设定策略设计的抑制因子的策略函数,tgtl表示可观测目标序列中的一个目标,具体的各项评估指标计算方法如表4所述。
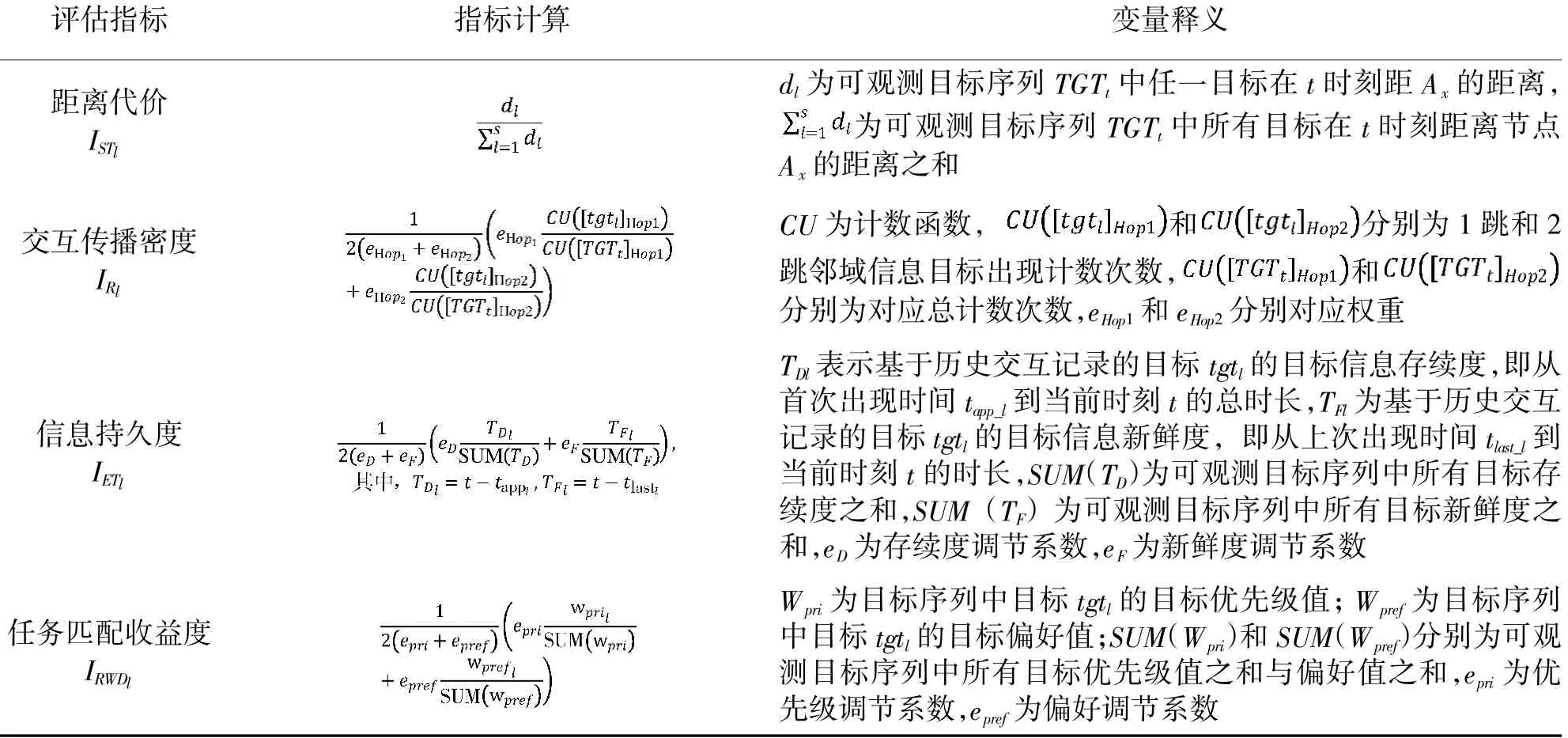
表4 基于LUid-CDLW 的级联目标拣选评估指标表Table 4 Cascade target selection evaluation indexesbasedon LUid-CDLW
5 仿真验证
5.1 仿真想定
仿真想定以500 个无人智能体节点开展基于H-CDLW 的双层耦合网络演化实验(初始网络基于BA 无标度网络进行重连初始化后构建完成)。下述所有实验初始网络构型相同且演化策略均服从于本文模型:1)无目标的自由态巡察:以500 节点初始最大随机连接数LinkRNDmax为8 的初始构型进行无目标自由态巡察实验,分别按最大连接保持数LinkCapmax为10 条、5 条、2 条递减,可感知目标范围按300 计,观察仿真时间步TimeStepSIM为500、1 000、1 500、2 000 时网络的运动和自由演化情况。2)有目标的感知与聚集:以500 节点初始LinkRNDmax为8 的初始构型进行有目标的感知与聚集演化实验,3个潜在目标(-850,850)、(850,-850) 和(-850,-850)分别于TimeStepSIM为20、100、300 出现。上述3 目标可感知目标范围按分别按100、400 和200计,观察网络的运动和节点聚集演化的情况。
5.2 实验结果与分析
5.2.1 无目标的自由态巡察
尽管通信一再受到抑制(如图3 的最大连接保持数从10、8 和2 依次递减),整体演化仍处在均匀状态,未发生突变和剥离情况。同时量化统计对比是否采用本文模型的进行时空分布层通联关系变化情况,包括通信连接总数、新增通信连接数和断开连接数。为排除感知通信范围的影响,感知通信范围均为600~800,即整体通联良好、基本全域可视。
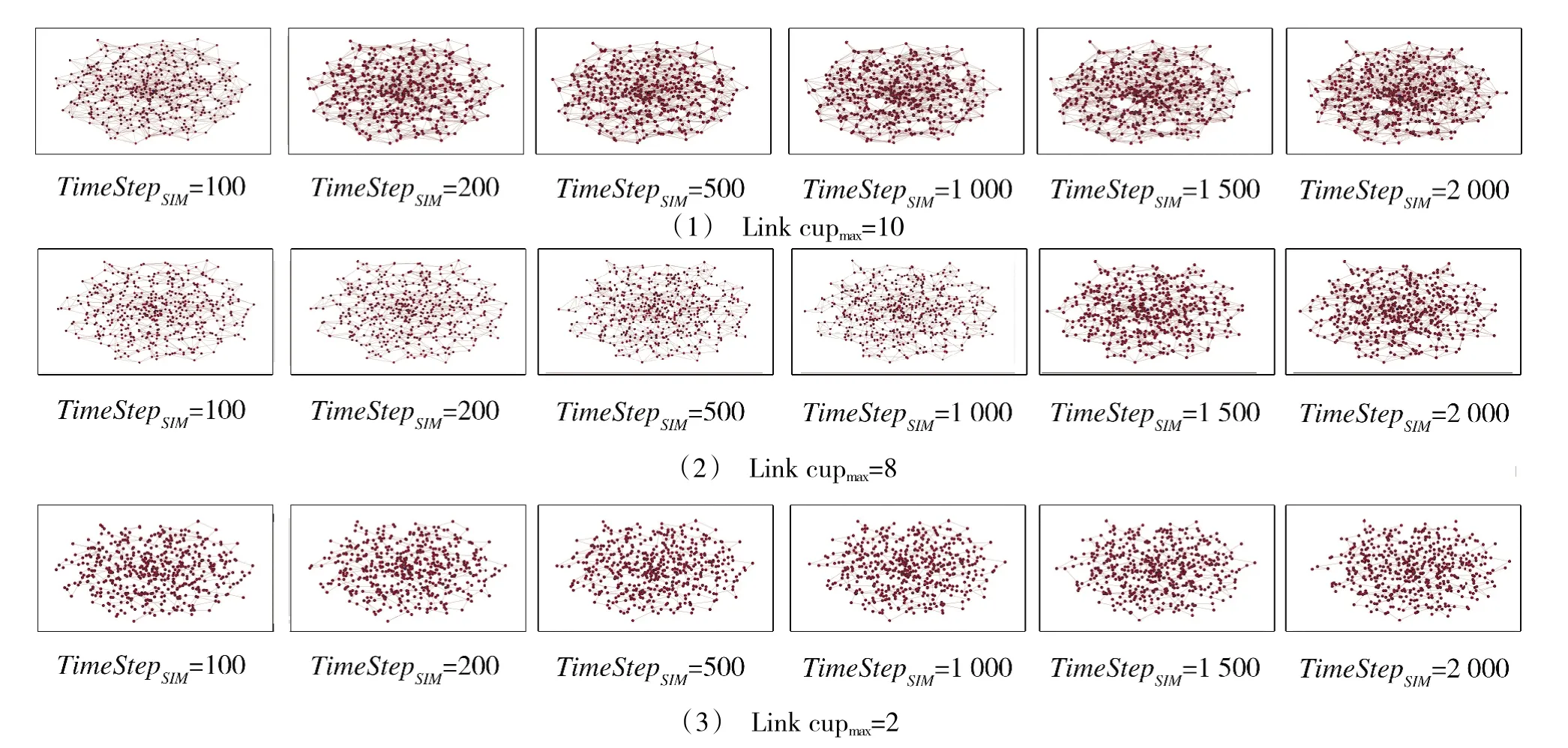
图3 自由态巡察演化实验拓扑关系图示Fig.3 Diagram of the topological relationship of the evolution experiment in free state inspection
从图4 中可以看到,仅依靠距离解算通信连接关系,在每步仿真过程中不采取分层筛选和历史评估偏好保持,整体通信连接呈衰减态势。本文模型集群总体维持在最大连接保持水平且具备时间稳定性。进一步加速节点振荡和距离变化,模拟验证运动速度相异,可通联基本条件丧失如:损失、失联等情况下的鲁棒性。在4 倍和8 倍巡察加速过程中(如图5 所示),本文模型集群通信连接信道保持数依旧保持在将近5 000 条的高位运行,稳定程度和总数随加速巡察的倍率增加略有降低,具有较好的系统鲁棒性。
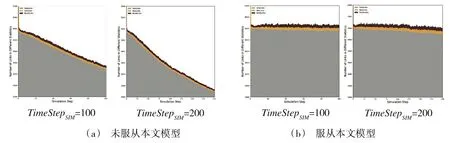
图4 无巡察加速、无人机集群连接关系统计对比图Fig.4 Statistical comparison ofUAV cluster connection relationshipswithno patrol acceleration
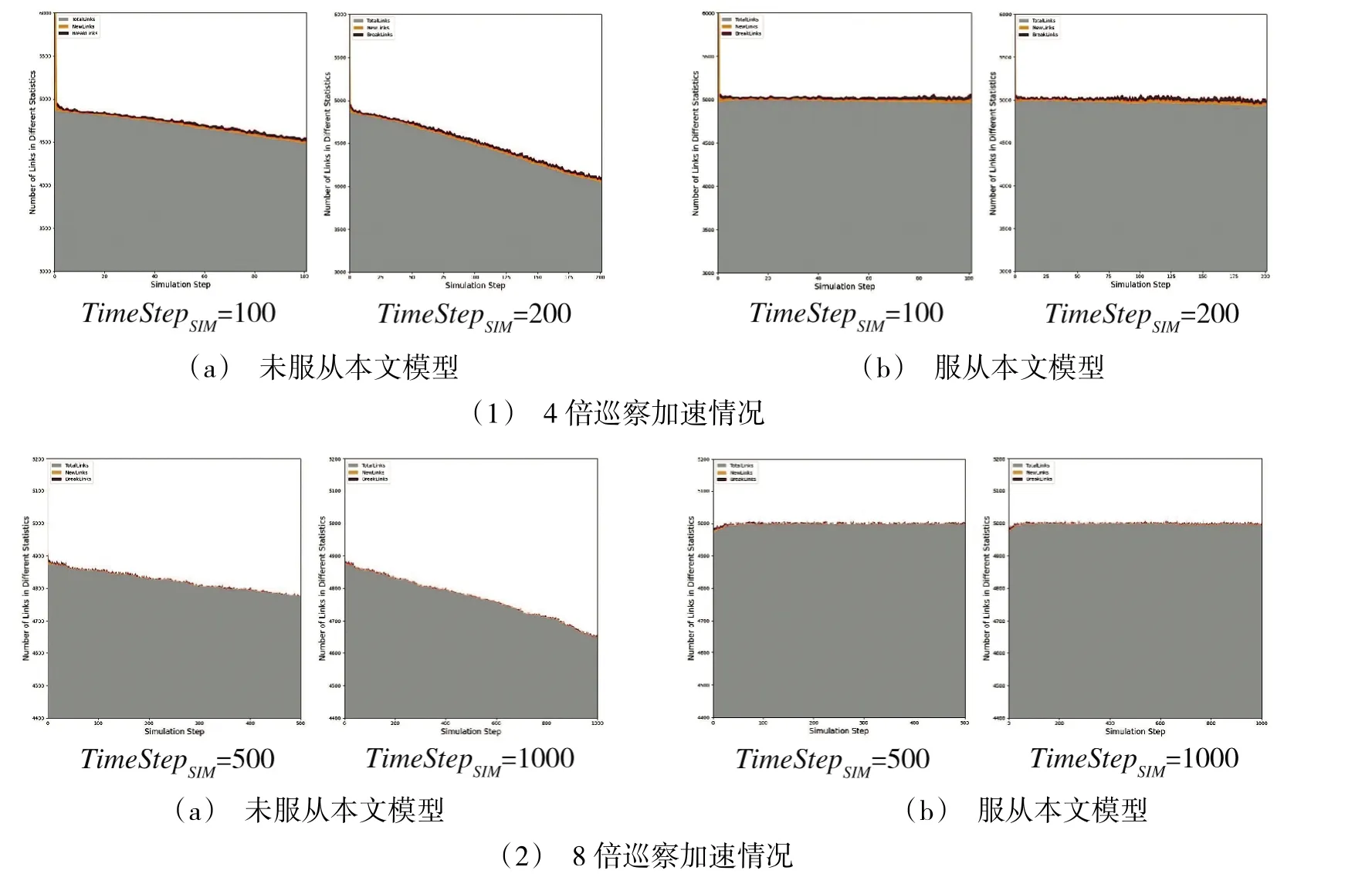
图5 巡察加速后,无人机集群连接关系统计对比图Fig.5 Statistical comparison of up dating status of connection relationships
实验通过30 次实验的均值统计(如表5 所示),本文模型集群能在不稳定条件下对减少的连接进行补充,更新频次明显高于普通集群。可见,基于双层耦合网络的无人系统能够基于历史连接保持和动态感知范围,迅速补足通信能力缺失,可增强系统稳定运行和适应能力。
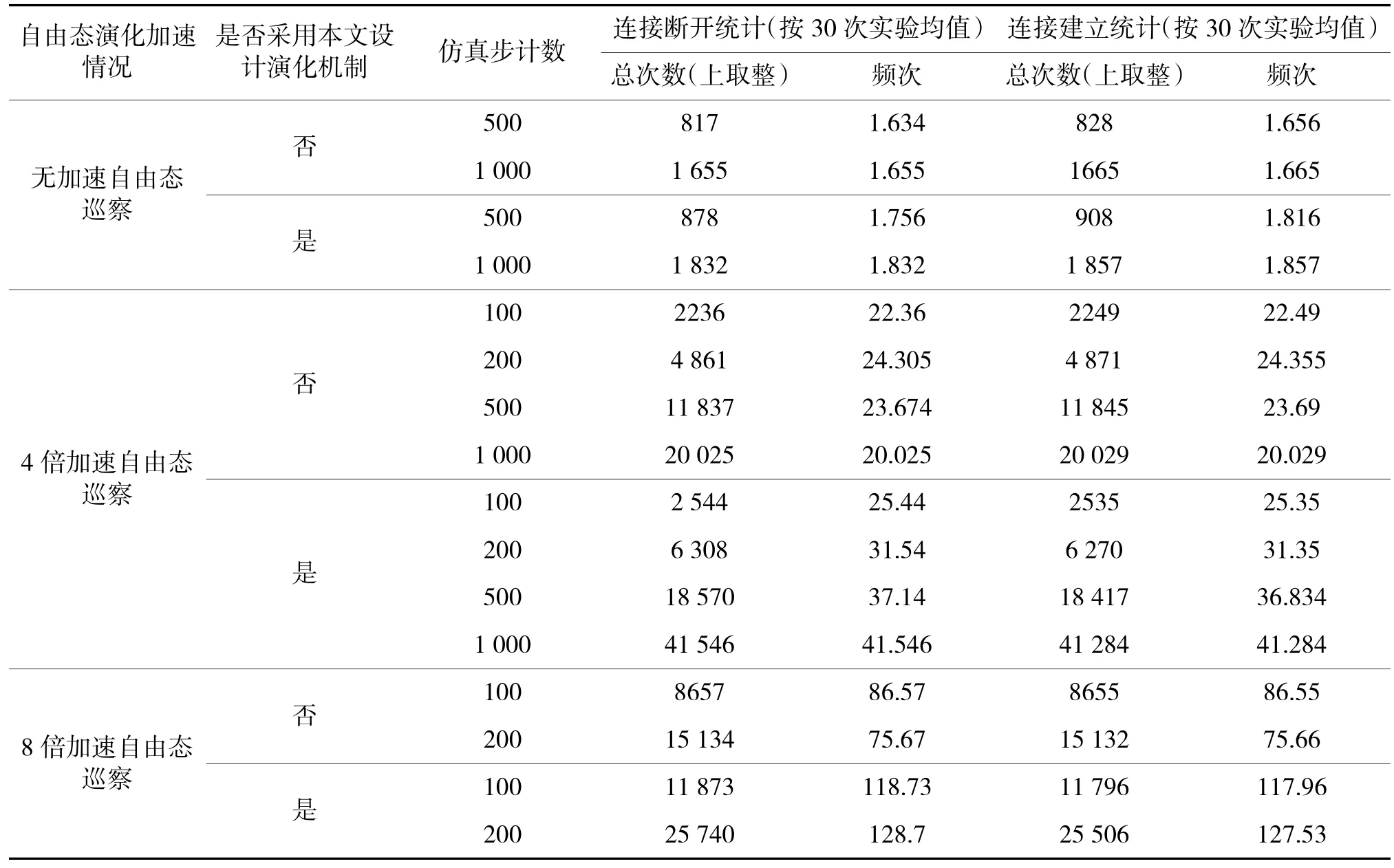
表5 连接更新对比统计表Table 5 Statistical comparison of updating status of connection relationships
5.2.2 有目标的感知与聚集
如图6 和图7 所示,有目标的感知与聚集过程中,无人机集群能够顺利完成对不同目标的动态聚集和观测过程,围绕目标形成稳定的观测群组。延续之前实验中最大通信连接保持数的降低的鲁棒性验证方法,为上述侦察聚集过程增加不稳定因素,验证无人机集群是否能够在顺利完成对三个目标的感知聚集层次化控制。下面通过量化统计与分析无人机集群度分布变化情况,观察在侦察聚集过程中,前述实验无人机集群行为的稳定性是否能够得到保持。由于仿真无人机集群节点数较多,在图8中采用堆积图方式进行量化可视化。
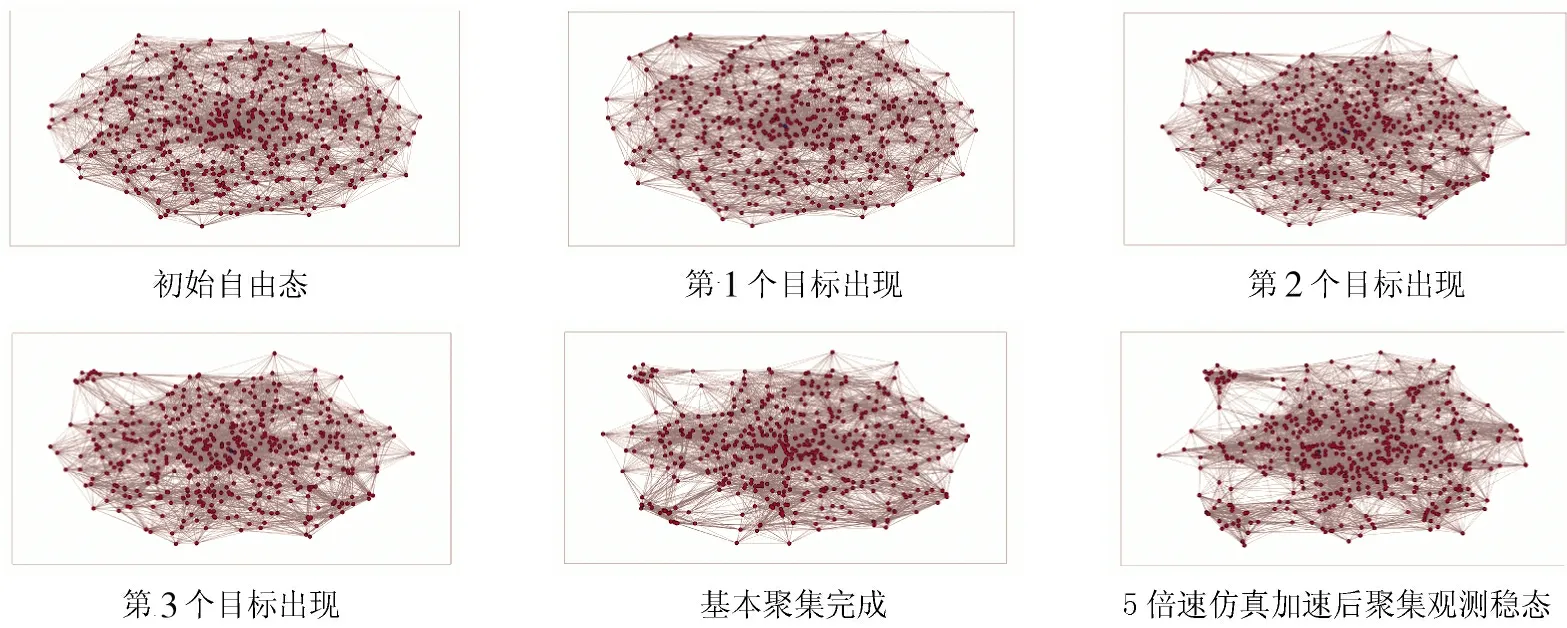
图6 有目标演化时节点连接关系与时空分布随目标变化情况Fig.6 Connection relationship and spatio-temporal distribution of evolution illustrated with the change of target
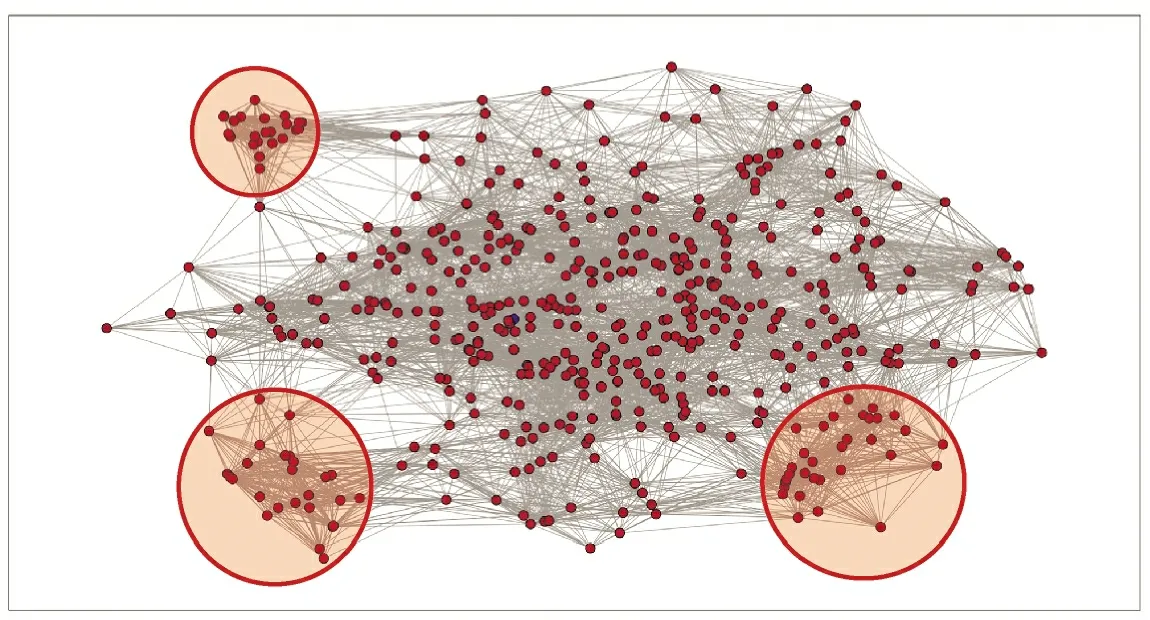
图7 聚集观测标注示意Fig.7 Diagram of aggregate observation clusters annotation
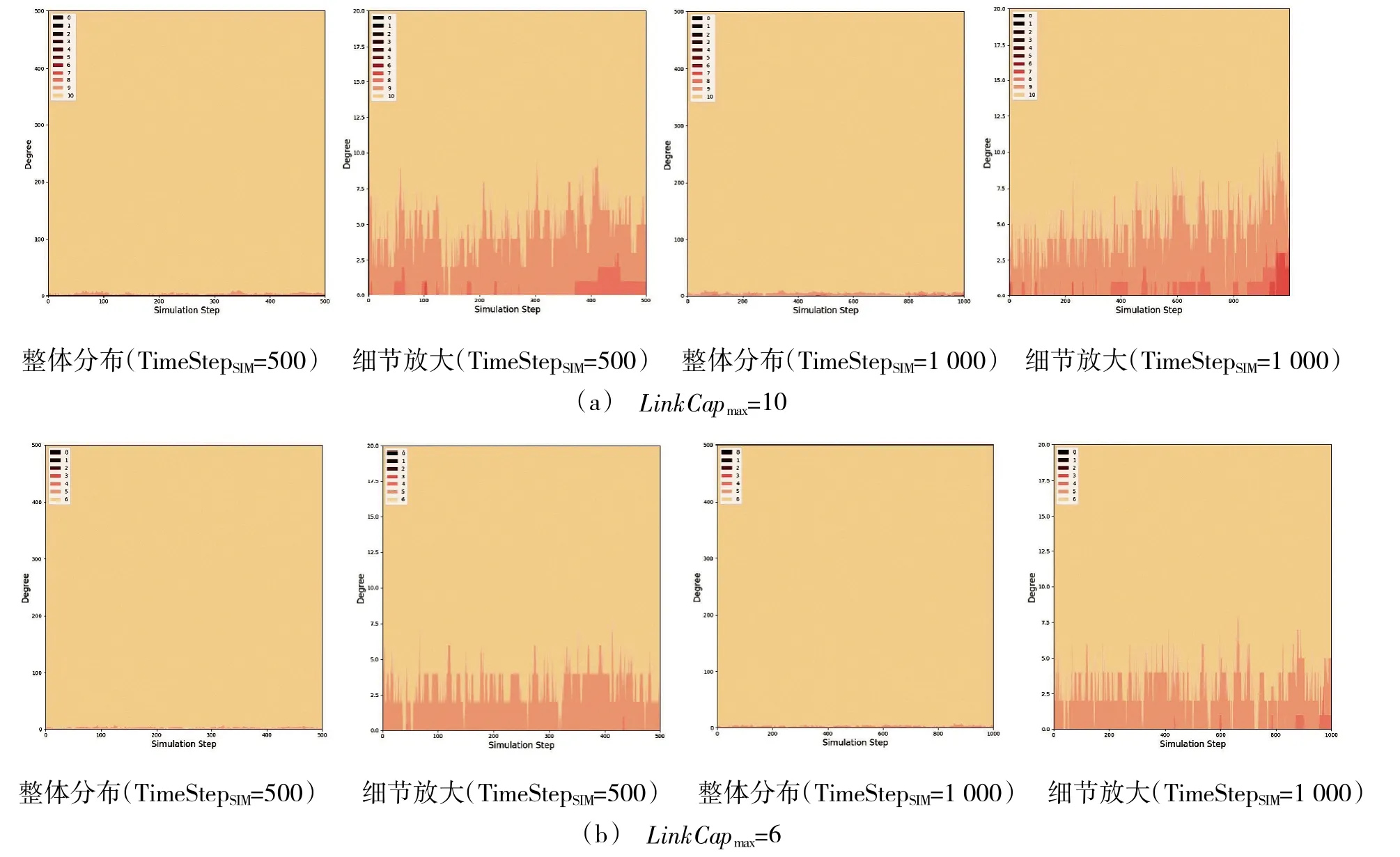
图8 无人机集群通信连接分布变化示意图Fig.8 Diagram of the changes of UAV cluster communication connections distribution
基于如图8 所示整体分布和细节放大情况,可以看到有目标侦察聚集过程中,集群通信连接分布情况与前述实验中基本保持一致,持续运动和聚集监视的无人机集群未出现较低通信连接数,基本保持在满通信信道负载运行,均匀性和稳定性良好。进一步在图8 的实验(2)中将LinkCapmax抑制到至多6 条信道水平,模拟弱通信连接条件下的均匀稳定运行能力,能够得到相同的实验结果,即在基本满负荷条件下信道保持均匀性和稳定性良好。
6 结论
本文面向实用化无人集群分布式控制问题,基于复杂网络信息交互与传播视角横纵双向解耦,形成了基于CDLW 与H-CDLW 的演化模型,构建了基于双层耦合网络的系统模型,设计了匹配的层次化交互控制多目标融合拣选方法,并通过仿真实验验证了该模型在多维度实用化目标均衡方面的优势,提供兼具匹配性和可扩展性的分层控制机制。本文成果属基础架构设计与验证,还需结合集群自主性涌现过程,对群组聚集、解聚以及信息交互决策过程中存在的冲突消解等问题,深化研究内容,完善当前的双层耦合网络系统模型设计,从而支撑可适应个体信息感知、信息融合、信息决策和信息传播等方面动态需求,形成具备动态分层耦合特性,按需装填、耦合不同算法模型,以及兼具匹配性和可扩展性的一般化机制和框架。
