一种新的遥感影像组合滤波去噪方法
2023-10-23张胜国a李现广a王子彦a闫志恒a
任 超,张胜国a,2,李现广a,王子彦a,闫志恒a
(1.桂林理工大学 a.测绘地理信息学院;b.广西空间信息与测绘重点实验室,广西 桂林 541006;2.中国电建集团贵阳勘测设计研究院有限公司,贵阳 550081)
0 引 言
由于传感器系统本身存在的缺陷及周围环境因素的影响, 遥感影像在获取和传输过程中会受到噪声干扰, 严重影响了图像后续的使用和研究[1-2]。因此, 在遥感图像预处理过程中, 有效去除噪声并且尽可能多地保留原始图像的细节信息显得尤为重要。目前对遥感影像的处理主要考虑高斯噪声及椒盐噪声[3-5]。传统的去噪方法主要分为两大类, 即空域滤波和频域滤波, 这两类滤波能够有效去除噪声, 但同时会使图像边缘及细节产生一定程度的模糊现象[6]。
近年来, 为了有效去除噪声、 保护图像细节, Dabov等[7]提出了BM3D算法, 这是一种联合三维滤波算法, 能够有效去除高斯噪声, 但对椒盐噪声去噪效果不佳; Zhang等[8]提出了前馈去噪卷积神经网络(DnCNN)算法, 它是目前基于深度学习的一种新的去噪方法, 能够实现高斯去噪, 但同样对椒盐噪声去除效果不佳。在实际应用中, 遥感影像所含噪声并非是单一的, 大多为同时包含高斯噪声与椒盐噪声的混合噪声, 单一的传统去噪方法在处理含有混合噪声的遥感图像时效果不理想。因此, 侯建华等[9]提出了将BayesShrink算法和自适应Wiener滤波相结合的去噪方法, 该方法在一定程度上解决了混合噪声去噪的问题, 但仍有较大的改进空间; 朱建军等[10]提出了3层组合滤波方法, 将Bayes小波阈值滤波、 自适应Wiener滤波和自适应中值滤波相结合, 达到去除混合噪声的目的; 邓开元等[11]提出了将三维块匹配算法和自适应中值滤波相结合的去噪算法; 任超等[12]提出了将BM3D和多级非线性加权平均中值滤波相结合的去噪方法。这些组合滤波虽然能够达到去除混合噪声的目的, 但最终都会残留部分噪声。
本文提出了将DnCNN算法与自适应中值滤波相结合的去噪方法, 在DnCNN算法的基础上增加了一层自适应中值滤波, 为了在去噪过程中更好地保留影像的细节、 边缘等信息, 在自适应中值滤波过程中对影像进行边界扩展[13], 采用噪点及其最近邻域像素中值代替原滤波窗口中值, 提升影像边缘及细节等信息的保护能力, 使去噪后的影像更加清晰。
1 算法原理
1.1 DnCNN算法
前馈去噪卷积神经网络(DnCNN)是在卷积神经网络(CNN)的基础上, 采用了更深的结构, 并且使用残差学习算法、 正则化、 批量归一化等方法提高算法的去噪性能, 能够处理未知噪声水平的高斯噪声。DnCNN算法将图像去噪视为一种判别学习问题, 通过端到端的可训练的卷积神经网络, 采用残差学习策略, 将图像信息与噪声进行分离, 进而将噪声滤除, 恢复原始图像。
X={x1,x2, …,xi, …,xn};
(1)
Y={y1,y2, …,yi, …,yn};
(2)
V={v1,v2, …,vi, …,vn};
(3)
V=Y-X;
(4)
(5)

DnCNN算法网络架构主要由3大部分组成: 第1部分(Conv+ReLU)为第一层, 该部分使用64个大小为3×3×C的滤波器生成64个特征图, 然后将校正后的线性单位(ReLU, max(0,·))用于非线性, 这里C表示图像通道的数量, 即于灰度图像C=1, 对于彩色图像,C=3; 第2部分(Conv+BN+ReLU)为2~D-1层, 该部分使用64个大小为3×3×64的滤波器, 并且在Conv和ReLU之间进行批量归一化;第3部分(Conv)为最后一层, 该部分使用C个3×3×64的滤波器对处理后的图像进行重构输出, 为避免产生边界伪影, 在进行卷积之前采用0填充的方式确保输入图像与输出图像大小保持一致。
1.2 自适应中值滤波
传统的自适应中值滤波(IAMF)是一种非线性滤波, 它不仅能够有效去除噪声, 而且在一定程度上能够保留边缘纹理细节。该方法在去噪过程中主要分为两个进程, 可以定义为进程A与进程B。设X(i,j)为中心像素点(i,j)在进行滤波时对应的窗口(窗口允许的最大尺寸为Mmax),Zmin为窗口X(i,j)中灰度值的最小值,Zmax为窗口X(i,j)中灰度值的最大值,Imed为窗口X(i,j)中灰度值的中值,Z(i,j)为图像像素点(i,j)位置上的灰度值:
ZA1=Imed-Zmin;
(6)
ZA2=Zmax-Imed;
(7)
ZB1=Z(i,j)-Zmin;
(8)
ZB2=Zmax-Z(i,j)。
(9)
滤波具体算法流程如下:
进程A: 如果ZA1>0且ZA2>0时, 转入进程B; 否则, 增大窗口X(i,j)尺寸。如果窗口尺寸x(i,j)≤Mmax, 则重复进程A; 否则, 输出该像素点灰度值Z(i,j)。
进程B: 如果ZB1>0且ZB2>0时, 输出该像素点灰度值Z(i,j); 否则, 输出中值Imed。
2 本文算法
对于噪声图像, 自适应中值滤波是以其滤波窗口内的中值Imed替换噪声点像素进行输出的, 因此窗口内中值的大小直接影响去噪的效果及图像模糊度, 当中值像素点距离待替换噪声点较远时, 会导致图像失真, 出现模糊现象。为了能够在有效去除噪声的同时较好保留图像细节信息, 本文针对以上问题, 在经典的自适应中值滤波基础上进行改进:
(1)根据滤波算法流程, 在进程B中, 如果ZB1>0且ZB2>0时, 输出该像素点灰度值Z(i,j); 否则, 利用Z(i,j)及其最近邻域像素点的中值Zmed替换滤波窗口中值Imed, 进行输出。最近邻域像素点如图1所示, 其中Z(i-1,j)、Z(i,j-1)、Z(i+1,j)、Z(i,j+1)四个像素点表示点Z(i,j)的最近邻域像素点。

图1 最近邻域像素点Fig.1 Nearest neighborhood pixel
(2)在滤波处理前, 对图像进行最大滤波窗口尺寸边界扩展, 确保原图像边界像素点也能够自适应地参与噪声检测与处理, 提升图像边缘信息的去噪效果。最大滤波窗口尺寸边界扩展如图2所示: 假设最大滤波窗口尺寸大小为2, 图2a表示一张尺寸为3×3像素大小的图像X, 将其按最大滤波窗口尺寸进行边界扩展, 并且复制原图像边界像素值对扩展后的边界进行像素填充, 最终获得扩展边界后的图像Y(图2b)。

图2 图像边界扩展示意Fig.2 Schematic of boundary expansion
本文算法将前沿的DnCNN算法与改进的自适应中值滤波相结合, 在有效去除混合噪声的同时提升了图像细节信息保护能力。采用DnCNN对含混合噪声的图像进行高斯噪声去除, 再对输出的图像进行边界扩展, 利用改进的自适应中值滤波对输出图像进行二次修正, 提高算法对于混合噪声中椒盐噪声的去除能力。算法具体步骤如下:
(1)第一阶段: 去除高斯噪声。利用DnCNN算法对含有混合噪声的图像进行高斯噪声去除处理, 设置DnCNN接收场大小为35×35, 相应的深度D=17, 将卷积层(Conv)中的图像通道数量C设置为1。
(2)第二阶段: 图像边界扩展。对于去除高斯噪声后的图像, 复制图像最外侧的边界像素值, 将其对应的上下左右边界按最大窗口尺寸进行扩展。
(3)第三阶段: 去除椒盐噪声。对于扩展边界后的图像采用改进的自适应中值滤波去除图像中的椒盐噪声, 滤波最大窗口尺寸设置为7×7, 将滤波后的图像去除之前扩展的图像边界, 最后得到去除混合噪声后的图像。
(4)第四阶段: 算法去噪质量评价。对于去噪后的图像, 利用均方误差(MSE)[15]、 峰值信噪比(PSNR)[16]、 平均结构相似度(MSSIM)[17]3个因子以及边缘检测结果对图像进行去噪质量评价。算法实现流程如图3所示。

图3 本文算法流程框架Fig.3 Flow framework of algorithm in this paper
3 实验结果与分析
3.1 评价指标
将本文算法与BM3D 算法、 自适应中值滤波、 DnCNN 算法进行实验对比分析, 采用MSE、 PSNR、 MSSIM及边缘检测结果作为去噪效果评价指标, 显示算法去除图像混合噪声的精度, 其中MSE值越小、 PSNR值越大表示去噪质量越好, MSSIM更接近人眼的视觉评价, 其值越大, 表示去噪后的影像结构越完整。
(10)
PSNR=10×lg(2552÷MSE);
(11)
(12)
(13)
式中:F1(i,j)和F2(i,j)分别为原始影像与去噪影像;M与N为影像尺寸;SSIM为结构相似度;MSSIM是通过将影像分块计算SSIM, 然后对各分块的SSIM取均值所得;x和y分别表示原始影像和去噪影像;μx、μy分别是x、y的平均值;σx、σy分别是x、y的标准差;σxy是x和y的协方差;c1=(k1L)2、c2=(k2L)2是用来维持稳定的常数;B是影像分块数。
3.2 仿真去噪实验
遥感影像中常见的混合噪声浓度为25/0.005、 30/0.010、 35/0.030、 40/0.050(高斯噪声标准差/椒盐噪声密度)。为了验证本文算法对于混合噪声去噪的有效性与优越性, 仿真实验采用大小为256×256像素的图像, 分别对图像加入上述4种浓度的混合噪声, 比较本文算法与与BM3D、 IAMF、 DnCNN、 DAIN与自适应中值滤波结合(DAIN)算法的去噪效果, 运行平台为Matlab R2018a, 实验结果见图4。可见, 随着噪声浓度升高, 各算法去噪质量下降, 但本文算法去噪效果相对稳定。对于MSE、MSSIM这两个指标, 在低浓度噪声影响时, 虽然本文算法去噪后的MSE、MSSIM与BM3D算法和DAIN算法基本持平, 但随着噪声浓度升高, BM3D算法的MSE、MSSIM指标下滑严重, 并且本文算法各项去噪指标均优于DAIN算法。综合各项指标对比结果分析, 本文算法相比于传统去噪算法具有更好的去噪效果。在噪声浓度为25/0.005时, 本文算法去噪效果如图5所示。
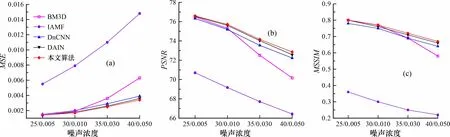
图4 5种方法的图像去噪仿真模拟效果对比Fig.4 Comparison of image denoising simulation effects by 5 algorithms

图5 仿真图像去噪效果图Fig.5 Denoising effect of simulated image
3.3 遥感影像去噪实验
为了验证算法的可行性, 进行一个真实遥感影像去噪实验。利用高分1号卫星在2014年3月5日拍摄的江苏某湖泊的正射影像作为去噪实验数据, 截取实验数据大小为1 250×1 250像素, 同时对截取的影像添加不同浓度的噪声, 以便进行定量分析。各去噪算法在不同噪声浓度条件下的遥感影像去噪实验结果见图6。在噪声浓度为30/0.010时, 各去噪算法的去噪效果如图7所示, 各算法去噪效果局部放大图如图8所示。
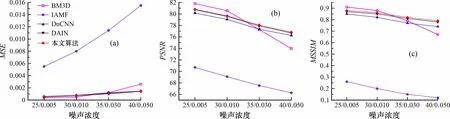
图6 5种方法遥感影像去噪实验效果对比Fig.6 Denoising results of remote sensing image by 5 algorithms

图7 各算法去噪效果图Fig.7 Denoising effect diagram of each algorithm
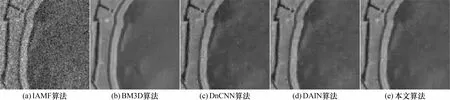
图8 各算法去噪效果局部放大图Fig.8 Local enlarged view of denoising effect of each algorithm
自适应中值滤波对于混合噪声去噪效果较差, 其对椒盐噪声的去除效果明显, 但受混合噪声中高斯噪声的影响。随着噪声浓度升高, 其均方根误差迅速增大, 峰值信噪比及平均结构相似度也迅速下降, 图像模糊严重。BM3D算法在噪声浓度较小时去噪效果较好, 特别是对高斯噪声去除效果明显, 但随着噪声浓度升高, 受到混合噪声中椒盐噪声的影响, 其去噪质量下滑明显, 并且图像中残留有较多的椒盐噪声点。随着噪声浓度升高, DnCNN算法对于混合噪声去噪效果相比BM3D算法稳定, 但图像中仍残留有较多椒盐噪声点, 从定量指标MSE、 PSNR和MSSIM三方面比较分析, 本文方法均优于DnCNN算法。通过本文方法去噪后的图像, 随着噪声浓度升高, 其均方根误差、 峰值信噪比及平均结构相似度相对稳定, 并且图像中残留的椒盐噪声点相对较少; 从PSNR、 MSSIM两个指标分析, 本文算法均优于DAIN算法。 因此, 无论是从主观视觉还是客观指标上来看, 本文提出的组合去噪方法均优于传统的去噪算法, 可用于实际遥感影像去噪。
3.4 影像边缘检测
为分析去噪后影像的边缘细节保留情况, 对去噪影像进行边缘检测。截取3.2节中遥感影像的部分影像作为检测实验数据, 采用Canny算子[18]对上述算法去噪后的影像作边缘轮廓检测, 结果见图9。
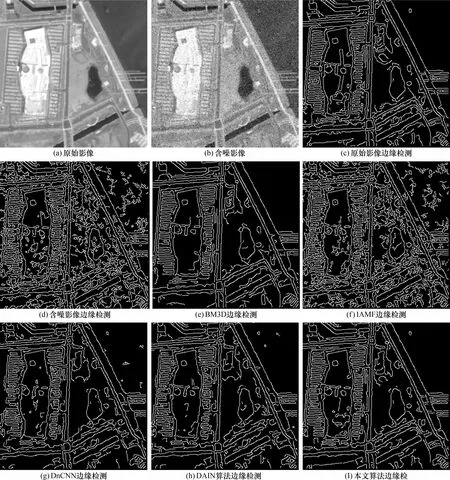
图9 各算法去噪影像边缘检测结果Fig.9 Edge detection results of each algorithm for denoising image
通过边缘轮廓检测后, BM3D算法去噪后的影像轮廓线条相比本文算法较为稀疏, 原始影像的一些边缘细节在去噪过程中被当作噪声滤除, 不能很好地保留影像的边缘细节信息; IAMF算法去噪后的影像轮廓线条较为杂乱, 去噪后的影像残留有较多的噪声, 破坏了原始影像的轮廓结构, 影响了边缘检测的结果; DnCNN算法与DAIN算法去噪后的影像相比本文算法与原始影像检测结果来看, 仍然有部分杂乱的轮廓线条, 去噪后的影像仍然残留有部分噪声, 并且影像的部分细节信息也被当作噪声滤除; 本文算法去噪后的影像轮廓线条较为连续, 残留的噪声较少, 特别是在影像的中间及及下方区域, 相比原始影像, 去噪后都能检测出影像的大致轮廓边界, 说明经过本文算法去噪后可以保留较多的影像边缘细节信息。
4 结束语
遥感影像噪声会对影像后续的使用和研究产生较大影响, 因此去噪是遥感影像处理中必不可少的环节。 针对影像中存在的混合噪声, 提出一种新的遥感影像组合滤波去噪方法。由仿真实验与真实遥感影像去噪实验结果可见, 无论从主观视觉效果还是从客观质量评价来看, 本文方法都具有较好的去噪性能, 且去噪效果优于传统去噪方法, 能够有效去除高斯噪声和椒盐噪声, 较好地保留图理像边缘及纹细节, 可应用于实际的遥感影像去噪处理。