STM32 辅助轮椅电控系统创新设计
2023-10-23于政宽李德世张国强
张 雁, 于政宽, 李德世, 张国强
(长春大学 机械与车辆工程学院, 吉林 长春 130022)
0 引言
传统的手动轮椅已经无法满足用户的需求, 而电控系统的引入可以为用户提供更大的便利和舒适性。其中,STM32 作为一种高性能的微控制器, 具有强大的处理能力和丰富的外设接口, 为辅助轮椅电控系统的创新设计提供了广阔的空间。 本文将重点探讨如何利用STM32 的特性和功能,设计出更智能、更安全、更舒适的辅助轮椅电控系统,以提升用户的生活质量和独立性。
1 整体设计
本产品由STM 模块与轮椅部分组成,STM 模块主要是由STM32F103 作为主控板,速度监测控制,ECG(Electrocardiogram)心电检测传感器,角度传感器。 可以实现对老人以及轮椅的状态监控并自动触发报警, 通过GPRS的蜂窝移动介入与监护人的上位端APP 及时联系,可以及时得到救助。为了方便移动、固定可以在轮椅部分在座椅下方可以加上轮子与固定装置,轮子采用橡胶材质,可以实现静音、减震的作用,总体系统流程图如图1 所示。
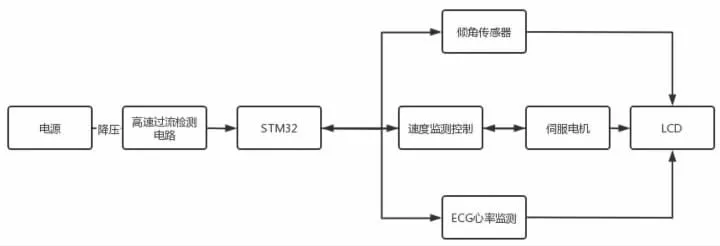
图1 总体系统流程图
2 硬件设计
系统的控制部分采用了STM32 系列C8T6 单片机,其最高工作频率可达72MHz;总的来说,通过轮椅扶手处摇杆将控制信号传递给MCU,MCU 通过ADC 等外部模块持续收集电机的工作状态信息,实现了矢量控制。 根据矢量控制的驱动原则, 控制电路必须对霍尔传感器所输出的三相霍尔信号进行采集, 从而获得电动机的旋转情况,然后由MCU 将切换信号输入到驱动芯片中,除此之外,一些外部电路来实现电流的测量和电压的稳定化。
2.1 STM32F103 主板
STM32 单片机收集电流收集部分使用运放, 将收集到的相位电流经过放大后传送给单片机的模数转换器,再经单片机计算得到真实的电流值。 电动机V 相位的电流, 通过取样电阻器得到。 在此基础上,利用单片机对测量到的相电流进行处理,并将其作为闭环控制的依据。在相位电流到达最大时,程序会自动切断全部开关,使系统不能正常工作。 在运行阶段,STM32 单片机响应外部事件,中断、定时器、ADC 采样等,执行相应的中断服务程序。中断服务程序执行完成后,STM32 单片机会返回主程序继续执行。运行流程是循环执行的,主程序会不断地循环执行,直到复位或者停止运行。 因此,在应用程序设计时,需要注意循环的设计,保证程序的正确性和稳定性。STM32 支持多种接口,包括UART、I2C、SPI 等,可以与各种传感器、执行器等进行通信[1],从而实现多种辅助功能,如倾斜传感器、 加速度传感器、ECG 心电图传感器等,如图2 所示。

图2 STM32F103C8T6 电路图
2.2 倾角传感器模块
本设计采用SCA100T 芯片作为倾角传感器来检测轮椅的姿态状态,实现轮椅翻倒警报功能,SCA100T 芯片是一种高精度的倾角传感器, 能够实时测量轮椅的倾斜角度,并精确反馈给控制系统,从而实现更为准确的轮椅控制。倾角传感器一般指的是水平传感器,该仪器的工作原理是利用两轴倾角传感器SCA100T 来实现的,SCA100T是双轴倾角传感器,原理如图3 所示为固体摆式示意图,它是由摆锤、 摆线和支架组成的[1]属于固摆式倾角传感器, 姿态处理模组电路见图4 该种类型的传感器主要是把测量到的静态重力加速度的变化量转换为倾角信息量的变化[2]。

图3 固体摆式原理示意图
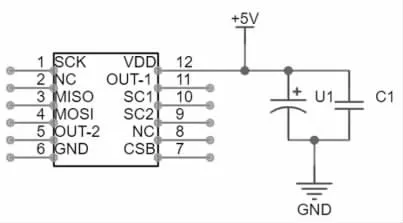
图4 姿态处理模组电路图
受重力G 和拉力T 的作用下,根据平行四边形法则,合外力F 为:
在对测量结果进行运算后,使用SPI 来与LCD 显示屏的显示模块进行通讯, 使用I2C 协议来读出姿态传感器SCA100T 的数据,使用串口通信的模式来接收蓝牙模块的数据, 并且通过PWM 波形来对电动机和舵机进行控制。 姿态处理模组电路如图4 所示。
误差修正放大器的主要负责:消除零点误差,根据电路的电源电压,适当地放大传感器的灵敏度,使电路的抗干扰能力最大化[3]。 A/D 转换和信号处理电路,其主要功能是对从误差放大器中输出的DC 信号进行A/D 转换,并对其进行角度计算,并输出角度数据。
2.3 速度检测控制
通过使用单片机STM32F103ZET6 接收按键模块产生的信号,PWM 信号输出和控制信号输出分别通过计算相应的占空比得到。 产生的PWM 信号驱动L298 的使能和方向,控制电机的转动。在STM32 中,PWM 输出的方式一般采用定时器的方式,通过控制定时器的计数值、时钟源等参数, 可以实现PWM 输出的占空比和频率的调整。使用STM32 的PWM 进行调速的基本步骤和公式:
(1)初始化TIM 选择适当TIM,根据需要设置其时钟源、计数器分频器和计数器模式等。可以将TIM2 配置为向上计数模式,并使用系统时钟作为时钟源。其中自动重载寄存器的值应该根据所需PWM 频率和时钟频率计算得出。
ARR=(F_TIMERCLK/(F_PWM*PWM_RESOLUTION))-1(2)
ARR 为自动重载寄存器的值,F_TIMERCLK 为TIM的时钟频率,F_PWM 为所需的PWM 频率,PWM_RESOLUTION 为PWM 的分辨率(通常为1000 或者4096)。 配置输出比较通道(OC)选择一个或多个OC 通道,设置其模式和参数, 输出比较模式、 预装载和极性等。 可以将OC1 通道配置为PWM 模式, 设置占空比为50%。 启动TIM 将TIM 使能,开始计数。
Duty Cycle = (CCR / ARR)*50% (3)
(2)CCR 为捕获比较寄存器的值,ARR 为自动重载寄存器的值。 CCR 的值应该根据所需占空比计算得出。
(3)启动定时器(TIM)TIM 开始计数,通过设置TIM的CR1 寄存器的CEN 位来实现。
(4) 改变占空比使用STM32 的库函数来更改OC 通道的值,改变PWM 输出的占空比。 可以使用以下库函数将OC1 通道的值更改为75%:TIM_SetCompare1(TIM2,(uint16_t)(ARR*0.75))。
(5)调整占空比使用外部信号(例如电位器、编码器或传感器)来调整PWM 输出的占空比,使用ADC 模块读取电位器的值,并将其转换为占空比。
(6)调整占空比:可以使用外部信号(例如电位器、编码器或传感器) 来调整PWM 输出的占空比。 可以使用ADC 模块读取电位器的值,并将其转换为占空比。
3 高速过流检测电路
采用高速过流检测电路可以实现实时监测电机过流情况、快速响应电路故障、增强设备稳定性和保护电池电路等优点,老年人辅助轮椅电机在运行时,可能会因为各种原因出现过载或者堵转等异常情况, 如果不及时发现并处理,就会对老年人的使用安全造成严重的威胁。采用高速过流检测电路能够实时监测电机的过流情况, 及时发现并处理异常情况,保证老年人的使用安全。
该高速地测过流检测解决方案采用单个零漂移快速建立放大器(OPA388)和一个高速比较器(TLV3201)加以实现。该电路转为检测快速电流信号和过流时间(如电机和电源) 的应用设计。 高速过流检测电路如图5 所示。OPA388 具有最宽的宽带以及超低漂移和快速压摆率,选择该器件。 TLV3201 具有快速响应功能(因为其40ns 的小传播延迟和4.8ns 的上升事件), 因此选择了该器件。这使比较器能够直接连接微控制器的逻辑电平。TLV3201 还具有低功耗和40μA 的静态电流。 通常,对于低测电流检测检测电阻器上的放大器可用于同相配置。不过, 所示的应用电路使用OPA388 作为检测电阻器上的差分放大器。 这在分流电阻器上提供了真正的差分测量,并且在电源接地和负载接地不一定相同的情况下可能是有利的[4]。

图5 高速过流检测电路
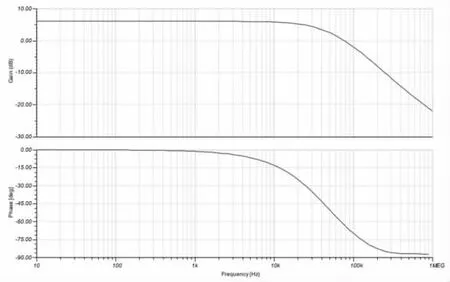
图6 设计仿真

图7 瞬态响应仿真结果
(1)确定传递方程,其中R1=R2并且R2=R4。
(2)选择检测电阻器值(假设最大压降为10Ma,负载电流为1A),以最大限度地降低电阻器上的压降。
(3)选择放大器增益,是COMP_IN 在负载电流达到临界阈值1A 时达到2V。
设置:R1=R2=1kΩ,R2=R4=200kΩ
(4)计算放大器的跨足增益
4 直流无刷电机模块
直流无刷电机可以通过精确的电流控制实现高精度的速度和位置控制, 可以保证老年人辅助轮椅的行驶稳定性和安全性,同时提供更好的使用体验。直流无刷电机运转时噪音较低,能够减少对老年人的干扰和影响,提高老年人的使用舒适度[5]。
本设计采用ATK-PD6010 作为电机驱动板支持DC12~60V 宽范围供电,最大输出电流10A,最大驱动功率600W;支持霍尔传感器检测,编码器检测,过零检测;支持3 相电流采集,相反向电动势采集,温度采集,驱动板电源电压采集。 由于三相U/V/W 的驱动器是一样的,所以通过U/V/W 的驱动器为例进行分析:U 相高、 低侧PWM 讯PWM_UH 及PWM_UL,经由图腾输出型光耦合,分别进入门驱动逻辑控制输入端子HIN 及LIN, 当控制讯号SD_IN=0 时, HIN 讯号经由HO,而HIN 为1 时,Q1为ON,HIN 为0 时,Q1 为OFF,Q1 为OFF;然后,LIN 信号经由LO 来控制下部管Q2 的接通和断开。Q1、Q2 的输出Motor_U 与马达的U 相连接。 图腾的输出与推挽输出相似,不需要上下拉电阻,具有很好的输出能力,而且输出信号会随着输入信号而变化, 在光耦输入端悬浮的时候,默认输出是低电平。 采用了图腾式的输出光耦合,在输入悬空时,上、下管同时关闭。 无刷直流电机的机械特性为:n=Ud/(2Keφ)-2Tem/(KTφ), 因此可以通过调节端电压Ud或定子电流Id来实现调速[6]。 驱动板3 相H 桥电路,如图8 所示。
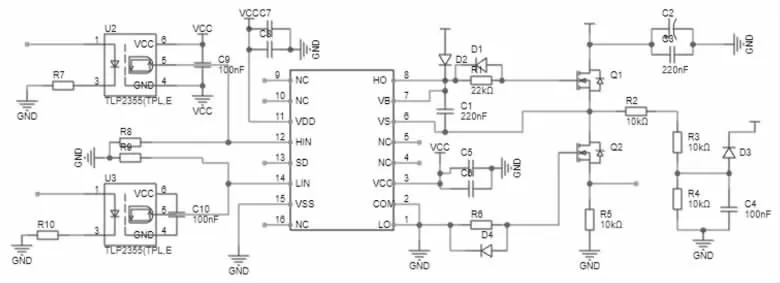
图8 驱动板3 相H 桥电路
4.1 直流无刷电机
根据电机驱动板支持DC12~60V 宽范围供电, 最大输出电流10A,最大驱动功率600W 的条件下选用MY1016Z直流无刷电机。这款电机的额定功率和额定转矩能够满足电机控制板的最大输出电流和输出功率的要求, 同时电机的外形尺寸也比较紧凑,适合安装在电动轮椅上。MY1016Z电机的额定功率为350W,能够提供足够的功率驱动轮椅运动。电机的额定转速为3200rpm,转矩1.6Nm,这样的参数可以提供适度的动力, 使老年人在使用轮椅时更加舒适和安全MY1016Z 电机运行平稳,噪音更少,比传统的有刷电机更加适合老年人电动轮椅使用。 这可以提供更加安静、舒适的使用体验,不会对老年人的健康造成负面影响。 尺寸紧凑,相对于传统的有刷电机来说体积更小,适合安装在轮椅上。
4.2 电压电流采集电路
3 个U4、U5、U6 双A B 运放TP2412,TP2412 为高带宽低噪低失调电压运放,性能优异,非常适合用于电压和电流的放大。 U 相经过过压的电压信号DIV_U 被连接到U4B 的同相端子上, 由于R12、R24 未被焊上,U4B 运算放大器被用作一个电压跟踪器, 其7 个引脚的输出信号的幅值与输入值一致。 尽管输入输出信号的幅度是一样的,但在一定程度上,输出信号与输入信号被隔离开来。与此同时,由于控制板和驱动板之间是由排线连接,所以信号路径较长,衰减较大。 在7 脚输出之后,加上了RC低通滤波,以消除信号线上的高频干扰,最后得到了用于控制板ADC 采集用的信号BEMF_U (BEMF 为反向电动势缩写)。此外, ESD 二极管VD2 还起到了消除静电的作用,因此对IO 起到了保护作用。
U 相位的电流放大,将取样电阻器(电流I)上的信号I-V_U 通过差分的方法,通过对U4A 运算放大器(运算放大器)进行差分,差分参考电压VCC1.2。
基准电压Vref 是1.25V。因此,在放大后,输出为Iout=6×0.02×1+1.25V
通过对Iout输出的模数转换器进行处理,即可得到相电流I 值。 可见,运算放大器的输出也是经过了RC 的低通滤波器和ESD 的保护.其中,AMP_IU 即为模数转换器所使用的电流讯号。 ATK-PD6010B 驱动板板载的电压电流采集电路,如图9 所示。

图9 电压电流采集电路
5 ECG(Electrocardiogram)心电检测传感器
ECG(ElectroCardiogram)是一种用来记录心电信号的非侵入性检查方法。它可以检测心脏的电活动,并以图形的形式呈现出来。 ECG 的原理是利用电极在皮肤表面记录心脏产生的电信号, 然后将这些信号放大并记录在纸上或显示屏上。 当心脏肌肉收缩时,它会产生一系列电信号,称为心电图波形。 这些波形可以分为P 波、QRS 波和T 波,它们分别代表心房收缩、心室收缩和心室复极。ECG 设备可以测量这些波形的幅度、 持续时间和形状,以检测心脏的功能和异常。 在进行ECG 检查时,通常会在身体的四肢和胸部放置电极。 这些电极可以记录心脏电信号在身体不同位置的变化,然后将这些信号转换为图形[7]。
此设计采用了电容耦合电测量方法, 对老年人生命信进行了测量, 它的方法是将心电信号通过电容耦合的方式进行数据采集, 采集的信号在经过滤波、 放大、A/D转换后,再送到单片机中进行数据分析与处理[8]。 其系统流框图具体如图11 所示。
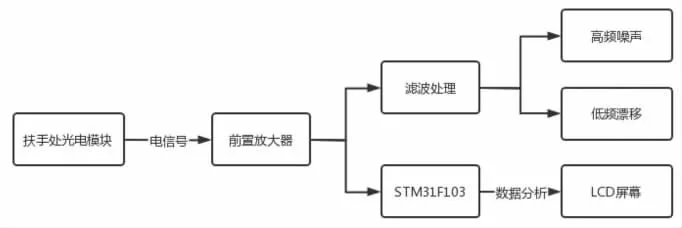
图11 MAX30102 心率模块系统流程图
工作原理是建立在血红素吸收光线的性质上。 在氧化血红蛋白上,红外线的强度大于红光,而在氧化血红蛋白上,红外线的强度大于红光。 在测量过程中,基于动脉血液流动的脉动特征, 脉动速度和脉动强度也被确定并显示出来[9]。 光源使用具有特定波长的LED,所述LED 对动脉血液中的血红蛋白(HbO2)和血红蛋白(Hb)具有特异性;透光率转换为电信号:由于动脉搏动充血的溶剂发生了变化,从而使这束光的透光率发生了变化,这时,通过光电变换接收通过人体组织反射的光线,转化为电信号,并将其放大输出。 光容积法:是利用人的身体组织在脉搏跳动时所产生的光线的差异,来测量血液中的氧气含量。
模拟电路:传感器输出的电信号非常微弱,需要通过模拟电路进行放大和滤波。模拟电路通常由放大器、滤波器和采样电路组成。放大器用于放大信号,使得信号的幅度足够大以便于后续的处理,模拟电路如图12 所示。

图12 MAX30102 电路图
6 结束语
此设计设计为了解决老年人在日常生活中行动不便问题, 也是本产品设计的起点, 在现如今的时代,国内的老龄化的趋势,老年人行动不便是老龄化问题其中之一,老年人对辅助产品的需求也接踵而至,在十九大提出了《国家积极应对人口老龄化中长期规划》鼓励运用现代科技对老年人辅助产品进行研发设计。 老年人辅助产品对人机交互性能要求严格, 所以对老年人辅助轮椅有巨大的需求。 这项技术有可能极大地改善依靠轮椅行动的老年人的生活质量, 并为他们的亲人和看护人提供安心。随着进一步的开发和完善,该系统可能成为轮椅和其他助行器设计中广泛采用的安全功能。
