ROV 水下机器人在渔业中的应用关键技术研究
2023-10-23周长根
周长根
(深圳潜行创新科技有限公司, 广东 深圳 518000)
0 引言
随着渔业现代化高速发展, 传统的人力粗放生产方式依据无法满足实际需求。 现代渔业涉及众多学科以及技术,《关于加快水产养殖机械化发展的意见》 指出国内水产养殖机械化还存在着短板,并要求能够补齐短板,以期望能够在2025 年,机械养殖户可以超过50%,从而提升渔业信息化水平。 目前,我国已经将ROV 水下机器人研发事业纳入重点科技项目,因此,掌握应用关键技术极为重要。
1 ROV 水下机器人概述
ROV 水下机器人,属于无人潜水器、无人水下航行器的一种,涉及人工智能技术、通信技术、传感器技术以及控制科学、水动力学、机构学等;同时,系统包括显示单元、定位导航、自动舵手、摄像头、通讯装置、动力推进器等。 不同的ROV 水下机器人用于不同领域,包括渔业、海洋石油、水利、海事、海岸警卫、军队、管线探测、海洋科学研究等。 本文将着重对ROV 水下机器人在渔业中的应用关键技术进行研究,以期望能够为实现渔业智慧、海洋牧场等目标赋能[1]。
2 ROV 水下机器人在渔业中的应用关键技术
ROV 水下机器人涉及众多学科技术, 包括人工智能技术、通信技术、传感器技术以及控制科学、水动力学、机构学等;同时,在渔业实际应用过程中也会有具体的技术要求,所以从以下几方面进行探讨。
2.1 水下视觉系统技术
从传统渔业生产模式来看,例如,在对海胆、海参、鲍鱼等海珍品进行采捕时, 主要采用的是人工潜水捡拾方式;同时,为了预防渔业资源枯竭,所以还需要人工测量已经捕获的水生动物的尺寸,以此为依据,筛选之后将部分放生。 在ROV 水下机器人的支持下,可以通过水下视觉系统、机械手臂等,替代传统人工对水生动物的识别、捕获以及测量等方式。
ROV 水下机器人的水下视觉系统可以通过图像识别、模式分类、语义分割、场景分析等,将图像信息提取出来,并及时反馈给相应的人员或者是系统,然后结合实际需求,可以进行相应的控制,例如,可以借助机械手臂对水生动物进行捕获, 或者借助相应的设备介入渔业场景进行观察等,如图1 所示。
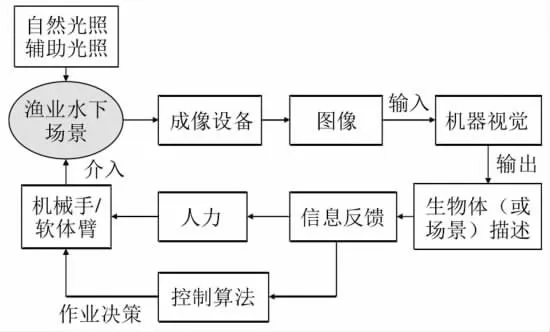
图1 水下视觉系统
在系统的支持下,水生动物的种类、尺寸、位置等信息可以快速反馈相应的系统,由系统按照指令进行操作,以海生物吸纳式捕获ROV 为例, 能够主动吸取水下目标。该水下机器人依托水下视觉系统以及系统指令,能够对已知存在的目标进行识别以及捕获。 但是从实际情况来看,要实现完全自动化捕获还有较长的路要走,因为需要自动搜索、跟踪、识别目标,才能接近于自动化[2]。
2.2 水下定位导航技术
ROV 水下机器人定位导航技术主要还是以声学定位为主,比较成熟的声学定位系统有超短基线、短基线;同时,惯性导航系统也逐渐应用于ROV 水下机器人定位导航之中,其优点是:自主性,主要体现在该导航系统不仅不需要向外界辐射电磁波、声波等能量,而且对于外部视觉信息没有太大的依赖程度, 但是如果ROV 水下机器人工作时间过长,那么会因为累积偏差而影响到精准导航。
为了能够确保ROV 水下机器人可以精准定位导航,可以考虑从超短基线定位导航系统以及多普勒仪、 陀螺仪、电子罗盘、水压传感器等方面入手打造完整的机载设备体系,以此为基础,能够精准获取坐标、运动速度、角速度、深度等关键参数;同时,结合相关传感器做好参数最优化估计,这样就可以成功获取更加精准的ROV 水下机器人信息,然后进行相应的控制以及导航。如果只依靠一种方法,其实难以达到精准导航的需求,因此需要采取上述模式,又或者是将各类系统进行合理组合,可以组合多种定位导航系统,例如,视觉导航、激光雷达导航、惯性导航、水声定位导航等。
2.3 水下运动规划技术
动态避障、运动控制、路径规划等是ROV 水下机器人水下运动规划必须思考的问题,因此,需要注意的是:做好路径规划,则必须对能源节约、最优性、路径平滑等各方面进行分析与考虑,以此为基础,对动态避障、流程适应性等问题进行针对性解决;同时,考虑到ROV 水下机器人会因为水流而逐渐偏离规划路径,所以如何增强其抗干扰能力是关键。 现阶段,ROV 水下机器人全局路径规划算法是重要研究领域,需要将粒子群算法、蚁群算法、遗传算法等综合,以仿生智能群为基础,从而设计出全路径规划算法。 但是要将这种算法有效应用,那么就需要结构化渔业环境予以支持,所以渔业环境需要加大建设力度,例如,选择特定规格的鱼笼、网箱等,可以让整个养殖空间更加结构化,以此为基础,分割空间并形成水体地图, 那么就可以精准设定工作目标区域,也就是ROV 水下机器人的导向, 进而预设路线完成路径规划[3]。
对于近浅海渔业、开放水域,或者是无法预设线路的水域而言,如果要达到路径规划的目标,则需要借助“即时定位与地图构建(SLAM)”算法,不仅可以创建地图,而且能够做好路径规划。水下环境本身复杂,所以要提取路标环境特征难度很大。 具体来讲,一方面,要求ROV 水下机器人的前端需要涉及场景匹配、水下视觉系统;另外一方面,后端需要涉及非线性系统的状态估计。 整体来讲,要达到预期目标,就对ROV 水下机器人硬件算力、环境稳定性等各方面提出较高要求。 考虑在开阔环境中使用SLAM,会因为高阶计算复杂程度而限制其性能,所以在使用ROV 水下机器人时,涉及特定任务、工作区域,SLAM就可能无法满足。 SLAM 更适用于空间范围相对较小、环境相对较稳定的开放水域等。
2.4 水下环境信息获取与传输技术
2.4.1 技术难点概述
渔业环境具有复杂性、特殊性,因此ROV 水下机器人信息感知存在技术难点,即:
第一,感知层。 水下复杂特殊的环境对传感器感知能力提出很高的要求。 感知层需要面临着各种因素的共同影响,例如,污损生物、水生动物、压力、温度、光照、水流等; 同时, 信息感知层的相关参数具有时变性,加之参数之间的耦合关系比较强,所以感知层技术难度又会增大。
第二,传输层。 无线传输如果不使用胶带缆,要满足信息传输的要求,通常采用水声通信。从实际情况来看,因为信道宽有限,所以感知的信息将会在UAC 中受到多径效应、环境噪声、湍流效应等影响,其信号强度就会衰减,进而出现冗余、缺失、失真等各种情况。此外,如果采用有线传输,会对ROV 水下机器人的运动产生束缚作用[4]。
2.4.2 智能传感器与多传感器融合
ROV 水下机器人若要实现智能化,其关键是传感器,所以传感器智能化程度提升之后,意味着ROV 水下机器人的环境信息获取能力会随之提升。现阶段,以微处理单元(MPU 微处理器)为基础的水下智能传感器具有较强的处理能力,包括自寻故障、自动校准、自动采集、综合补偿等;同时,还具备一定的加工处理能力,可以双向传输、预测参数、自动滤波降噪等。 基于此,未来可以对微型水下智能传感器加强研究, 同时, 将其与传感器模块进行融合,并集成于ROV 水下机器人之中。 为了能够获取完整、精准水下环境信息, 可以将多个传感器或者是多种传感器所获取的各种水下环境信息进行最优估计, 这样就可以充分整合多源信息,让ROV 水下机器人精准、高效获得水下环境信息。
现阶段,国外已经有学者以及研究机构将多传感器进行融合,以概率统计意义上的平稳随机过程、人工智能等为主。 一方面,基于平稳随机过程的多传感器融合方法有证据理论、卡尔曼滤波、贝叶斯估计等;另外一方面, 基于人工智能的多传感器融合方法有神经网络、粗糙集理论、模糊理论等。 结合这些方法,可以在感知层、传输层等融合多传感器, 让不完整的信息能够互补,可以提升感知与传输的可靠性。 从实际情况来看,在ROV水下机器人已经有学者应用多传感器融合方法, 例如,将视觉传感器、声学传感器等融合,可以帮助ROV 水下机器人精准识别检测水下环境;还有将陀螺仪、电子罗盘、速度计等融合的实践方法,可以让ROV 水下机器人提高水下定位精准性,让声学以及视觉传感器的优势可以互补[5]。
2.4.3 水下信息传输技术
上位系统与ROV 水下机器人之间的信息传输主要采用复合电缆,因此,结合实际需求,需要加大力度研发多功能、零浮力的新型复合电缆,能够最大限度保障传输的稳定性、高效性。 客观来讲,水下无线传输是业内人士公认的研究难点,目前主要以水声通信为主,但是从实际情况来看,因为水声通信具有延时大的特征,所以目前还无法实现Mbps 级的信息传输;同时,ROV 水下机器人在执行任务的过程中,还会受到其他干扰,所以目前更适用于具有清洁水质、 结构化的渔业环境。 如果ROV 水下机器人要实现高效、精准、无拘束作业,那么就需要对高传输率、低功耗、稳定的水下无线传输技术加大研究力度[6]。
3 结束语
综上所述,渔业作业环境具有精细、危险、肮脏、枯燥等特点,现阶段国内渔业人口数量有下降的趋势。随着现代化渔业的发展以及渔业人口数量的减少, 未来更加需要面向复杂、特殊渔业环境的ROV 水下机器人,有利于提升生产、 管理效率与质量。 特殊复杂的水下环境对ROV 水下机器人的稳健性提出较高要求,关键是无法精准感知内外部信息,所以与上位系统之、操作者之间难以达到高效通信。此外,如果执行任务区域涉及脆弱的水生动物,又会加大研制难度,各方面因素的限制,会对ROV水下机器人智能化发展产生影响。
国内外关于ROV 水下机器人在渔业中的应用关键技术的研究比较多,少部分技术应用比较成熟,还有一些技术未能达到实际应用水平,整体来讲,适用于渔业实际生产的ROV 水下机器人很少。IFR 以ISIC 体系标准为依据,对服务于渔业的水下机器人进行了划分,目前与农业机器人属于同一种服务机器人, 其发展空间巨大。 从渔业作业环境以及作业模式来看,对于ROV 水下机器人的自主化、智能化等方面有着迫切需求,但是复杂特殊的水下环境、多样化的任务要求等,意味着要达到这样的目标,还有很长的路要走。 目前,还有很多技术问题没有突破,也就限制了ROV 水下机器人在渔业环境中的充分应用。 未来,应该重点发展智能增氧机器人、起捕采收机器人、水质环境监测机器人、防疫处置水下机器人等,朝着高效捕获、精准管控的目标迈进,不仅能够推动ROV 水下机器人的发展,而且可以为现代化渔业革新提供技术力量。
