基于有限阶积分法的球面光电稳定平台机构运动特性分析
2023-10-21贾子钊李少哲姚建涛赵永生
韩 博,贾子钊,江 源,李少哲,姚建涛,*,赵永生
(1.燕山大学 河北省并联机器人与机电系统实验室,河北 秦皇岛 066004;2.燕山大学 先进锻压成形技术与科学教育部重点实验室,河北 秦皇岛 066004)
0 引言
随着军事科技的发展,光电成像追踪勘察需求逐渐增大,光电稳定平台的发展受到了广泛关注。光电稳定平台是一种将光电成像设备安装在飞行载体上的机电装备,可以保持光电探测器视轴稳定,对目标快速实施捕获、跟踪、瞄准[1]。三轴光电稳定平台具有三种运动模式,分别为偏航、俯仰和横滚,其作为高精度、高稳定性和快速响应的侦察设备在军民领域内有着广阔的发展前景[2]。
并联机构具有刚度大、误差小、精度高、动态特性好等特点,现已广泛应用于航空航天等领域[5]。球面并联机构作为一种特殊的并联机构,机构上所有点相对于球心的距离保持不变,即构件始终在某个特定的球面上运动,此类机构具有机构紧凑、灵活可靠等特点[7]。球面3-RRR(R为转动副)并联机构作为三自由度球面并联机构受到了广泛的研究[9],Staicu等[12]进行了 3-RRR 球形手腕并联机器人的逆运动学分析;单彦霞等[13]进行了2UPS-2RPU-PU(U为万向副,P为移动副,S为球面副)机构的逆运动学与正运动学分析,并求解了其工作空间和奇异位点,然而文中仅构建了正运动学求解中存在的非线性强耦合性方程,并没有进一步进行数值解的计算。张邦成等[14]提出了有限转动张量法和力与力矩平衡分析法,构建了系统逆运动学数学模型,得到了运动学非线性方程组;刘承磊等[15]提出了一种四自由度广义球面解耦并联机构,并建立了机构运动学模型,但是该分析方法在非解耦机构上实施存在困难。陈子明等[16]提出了一种基于3-UPU并联机构的新型踝关节康复机构,对机构的自由度及逆运动学进行了解算,建立了机构的运动学模型,并进一步求解了工作空间;胡波等[17]采用逐次逼近法求解了新型六自由度4-UPS+PSPR并联机构的正运动学模型,但该方法并没有克服传统正运动学计算中存在的计算量大、数值解求解困难的缺点。张英等[18]为了解决三自由度平面并联机构的正运动学建模和求解时需要建立坐标系和消元的问题,基于共形几何代数提出了一种脱离坐标系的几何建模和免消元计算方法,然而该方法在空间机构正运动学分析上存在困难。王启明等[19]提出了一种基于类线性解耦几何解析法与高阶收敛迭代法相结合的混合方法分析了并联机构正运动学,但是该方法存在计算精度较低的问题。Yang等[20]以单位对偶四元数作为机器人系统的广义坐标,推导了正运动学方程,提出了一种新算法并与牛顿迭代法进行了比较,该方法的局限在于仅适用于六自由度并联机构的正运动学分析,无法实现对少自由度并联机构正运动学分析。Ye等[21]提出了五自由度混合机器人的解析正运动学和逆运动学求解方案,在正运动学问题中,提出了一种基于Sylvester透析消去法将高阶运动学方程转化为四次多项式的方法,并进一步通过Ferrari法得到解析解;在逆运动学中,首先提出了用四次旋转表示的冗余欧拉角来解耦不同的运动,该方法的局限是仅适用于特殊机构,并不具有通用性。Gallardo[22]应用了一种简单的方法来进行纯移动并联机构的正运动学分析,基于移动平台上的三个点的未知坐标生成运动学方程,此方法适用于平面和空间移动平台,不需要引入旋转矩阵,大大简化了方程的推导。
因为并联机构具有多条分支所以其逆运动学求解比较容易,正运动学求解困难。当前学者们对于球面3-RRR并联机构运动学分析的研究主要集中在逆运动学的分析,少数的正运动学分析则多是采用四元数方法通过代数手段将正运动学方程转化为仅有单一变量的高阶高耦合约束方程,最后利用数值分析方法对其求数值解。本文基于有限阶积分法[23]对球面3-RRR并联光电稳定平台机构进行运动学分析,拓展了有限阶积分法在并联机构运动学求解中的应用,为并联机构正运动学求解提供了新的思路。
1 稳定平台与有限阶积分法
1.1 球面光电稳定平台
球面光电稳定平台如图1所示,具有三个自由度,运动副都在同一个球面上运动,转动副轴线相交于空间内一点,该点是球面机构的转动中心,通过伺服电机驱动可以自零位实现偏航转动±15°、俯仰转动±15°、横滚转动±15°。

图1 球面光电稳定平台Fig.1 Spherical photoelectric stabilized platform
1.2 有限阶积分法
有限阶积分法的原理[23]是将静态求解转化为动态线性叠加过程求解,求解原理示意图如图2所示。

图2 动态轨迹求解原理Fig.2 Principle of solving dynamic trajectories
任意并联机构都存在一个初始位姿,从初始位姿到达目标位姿理论上存在着无数种路径,每一种路径都对应驱动关节的一种输入函数。当给定运动学正解输入时,通过某种输入函数并在驱动关节驱动下动平台通过某种路径达到目标位姿。有限阶积分法的优点是有效地避免了传统正运动学分析中存在的复杂约束系统建模。
如图3所示,从并联机构的零位即初始位姿开始,将驱动关节运动行程分成有限微小区间,根据机构模型的特性,建立当前位置和目标位姿的映射关系便可求出该微小区间末端时刻动平台的坐标,依次进行迭代,每一次迭代由上一时刻所求坐标信息作为本次迭代的已知量。当所有微小区间内的运算全部完成时所得的结果即为在给定驱动条件下动平台的目标位姿。
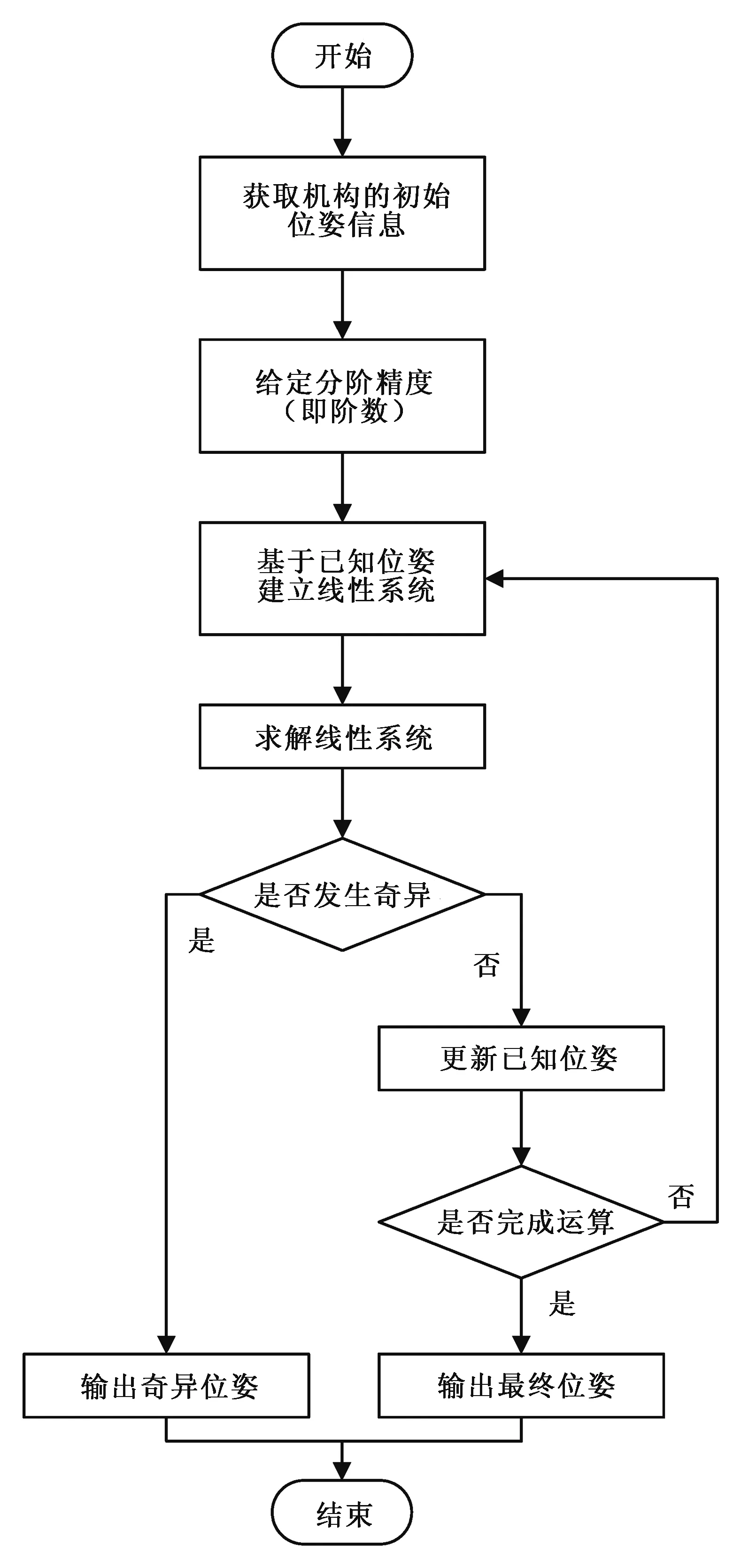
图3 有限阶积分法原理图Fig.3 Schematic diagram of finite-step-integration method
2 运动学分析
2.1 球面光电稳定平台机构
球面3-RRR光电稳定平台结构示意图,如图4所示。
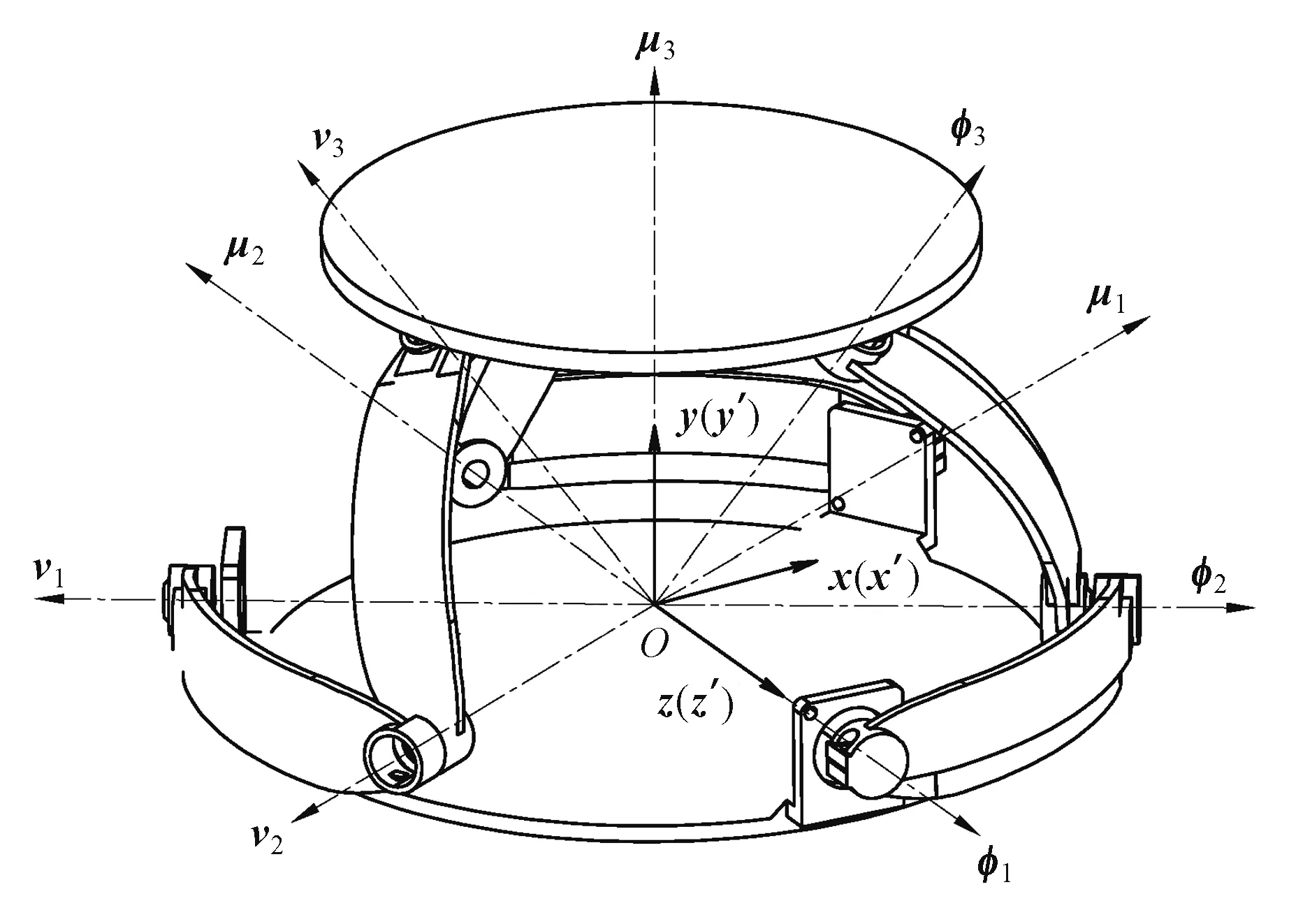
图4 球面3-RRR光电稳定平台机构简图Fig.4 Schematic diagram of spherical 3-RRR photoelectric stabilization platform mechanism
取球心O作为坐标系原点,建立定坐标系Oxyz,动坐标系Ox'y'z',球面半径为r,三条分支链上3个关节轴线之间夹角都为60°,ϕi为第i支链上第一级关节单位向量,该关节为驱动关节用大写符号表示,μi为第i支链上第二级关节单位向量,νi为第i支链上第三级关节单位向量(i=1,2,3)。三条支链上第一级转动关节方向单位向量为
三条支链上第二级转动关节方向单位向量为
三条支链上第三级转动关节方向单位向量为
2.2 运动学建模
机构初始位姿信息为已知条件,在机构运动过程中驱动关节转动某一角度时动平台达到目标位姿,有限阶积分法将该过程划分为有限微小区间的集合。由于3-RRR球面机构只有3个转动自由度,在微小区间内可以将支链的运动分为两步,第一步,支链整体随着第一级关节转动一个角度达到该阶段的中间位姿;第二步,支链第三级连杆绕第二级关节转动某一未知角度达到末端位姿(该阶段的目标位姿),机构的原理简图如图5所示。

图5 参考点位置示意图Fig.5 Reference point location diagram
选取参考点为各转动关节轴线与单位球的交点,将该阶段初始位姿各个参考点标记为Ri,1,Ri,2,Ri,3,中间位姿各个参考点标记为R'i,1,R'i,2,R'i,3,末端位姿各个参考点标记为R″i,1,R″i,2,R″i,3(i=1,2,3)。因此,基于微小区间内构件的运动向量建立如下约束方程组:
在微小转动区间内∠R″i,3R'i,3R'i,2近似等于90°,将上式进行线性化得
在定坐标系内,由于该机构只有3个转动自由度,微小区间内第三级转动关节的运动可以看作从初始位姿绕着动坐标系原点转过某一未知角度到达该阶段的末端位姿,因此可建立方程组如下:
因在微小转动区间内∠Ri,3OR″i,3近似等于90°,经线性化处理得
动平台上的关节中心随着动平台做刚体旋转运动,因此,根据刚体上向量间的射影不变性得
联立式(8)、(9)得
因为在微小区间内的非线性项为二次项,根据微分几何理论可以直接消去,经线性化处理得
联立式(5)、(7)、(11)可以构建具有9个未知量和9个线性方程。系数矩阵为
其中,0=[0 0 0]。
约束系统的未知量为
约束系统的常数列向量为
根据线性系统的代数结构:
可以求得矩阵d9×1中的9个未知元素,这9个未知元素分别为3条支链上得第三关节在经过一次微小变化后的位置向量。将当前阶段求解的结果作为下一次运算的已知量,经过连续k次求解即可得到球面3-RRR光电稳定平台机构的运动学正解。根据上述分析利用MATLAB软件进行正运动学算法编程,求解动平台末端位姿。并在ADAMS软件中建立仿真模型(如图6所示)对正运动学数值解进行验证。
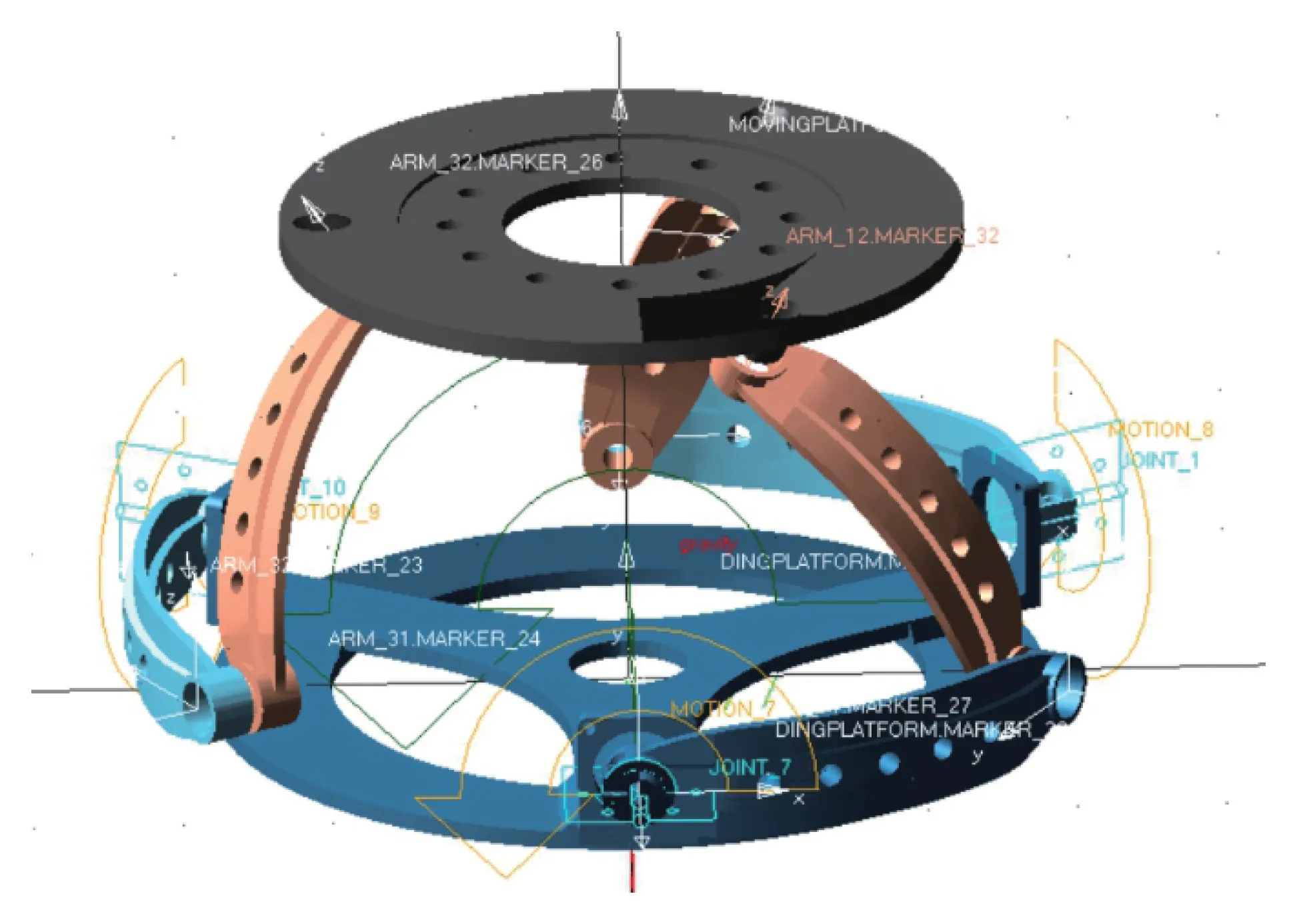
图6 球面3-RRR机构ADAMS仿真模型Fig.6 ADAMS simulation model of spherical 3-RRR mechanism
当给定支链一、二、三中驱动关节转动角度为:-20°,40°,-30°时,运算阶数被分别设置为1 000~10 000(运算阶数每次递增1 000)时,3条支链上第三关节轴线方向向量实际值与计算值之间的角度(支链一、二、三上第三关节轴线方向向量计算值与实际值之间的夹角分别记作误差1,2,3)共得到十组数据作为有限阶积分法的精度指标。误差计算结果与阶运算所需时间如表1和图7所示。

表1 误差值与运算时间Tab.1 Error value and operation time

图7 误差值与运算时间趋势图Fig.7 Trend chart of angle error value and operation time
通过表1和图7可知,当运算阶数设置为1 000时,单次阶运算时间小于0.1 s,位姿误差小于0.01°,当运算阶数设置为10 000时,单次阶运算时间小于0.65 s,位姿角度误差小于0.001°。
图7的曲线趋势表明,有限阶积分法对于正运动学解的精确性与时效性存在反相关关系,即运算阶数的选取应该针对工程问题的具体实施目标而定。例如,当机构整体的运算精度的要求要达到0.001°时,阶数k的可取值10 000以上;如果对于算法的时效性要求达到0.5 s以下,则阶数k的可取值8 000以下。因此,有限阶积分法是一种能够根据计算需求进行性能调整的算法。
3 工作空间和奇异分析
根据球面光电稳定平台工作条件要求:动平台3个方向上转动范围在±12°之间,并联机构动平台需要实现在工作空间内进行位姿调整。现对其进行可达工作空间求解,从机构正运动学角度出发,利用有限阶积分法求解工作空间克服了遍历搜索法计算量大的缺点,并且具有可达工作空间边界计算准确的优点。
在给定三个驱动关节转动范围为-30°~30°时,通过MATLAB编程计算得到球面3-RRR光电稳定平台机构的可达工作空间如图8所示。可达工作空间包络住需求工作空间,表明该机构的工作空间足以适应光电稳定平台基本工作空间要求。

图8 球面3-RRR光电稳定平台可达工作空间Fig.8 The spherical 3-RRR photo stabilized platform reachable workspace
奇异性判别方法:在区间[-30,30]内取两端极限值作为驱动关节的输入,在每次阶运算中,计算并记录的值作为判断机构是否在当前位点发生运动学奇异的标志。初始位姿时=0.36,在阶运算过程中,的值变为0时则认为发生奇异,但在浮点运算中可能存在的值无限接近于0但此时已经发生奇异,所以需要设定一个阈值来有效地避免因为计算机计算精度过高导致错将奇异位点认作可达位点。经过多次数值试验发现,当阈值设置为初始状态的1%时可以较好地对奇异位点进行判别,因此,本文确定当<0.36×10-2时则该阶段阶运算时机构发生奇异。
机构的奇异按照奇异形成原因可以分为运动学奇异和约束奇异[24]。为了保证球面光电稳定平台在工作过程中不会出现失控现象,要尽量避免机构处于奇异位型。运用有限阶积分法可以在每一次阶运算阶段通过系数矩阵行列式的值判断机构是否发生运动学奇异。由于有限阶积分法中正运动学方程组是依据并联机构的运动特性建立,所以当其系数矩阵行列式的秩为0时,有两种可能的情况:一是正运动学方程组无解,此时机构的运动螺旋发生线性相关,机构发生运动学奇异;二是正运动学方程组多解,此时机构的约束螺旋系发生线性相关,机构发生约束奇异。
通过分析图8知球面光电稳定平台需求工作空间完全被可达工作空间包络,可得球面光电稳定平台在需求工作空间内不存在奇异。奇异分析的结果可以应用在轨迹规划中从而避免在机构运动过程中出现死点或失稳现象。
4 结论
本文研究了一种球面光电稳定平台及其正运动学特性,并介绍了一种用于解决并联机构正运动学分析这类非线性问题的理论方法,即有限阶积分法。利用有限阶积分法求解了光电稳定平台的正运动学位置解,并研究了计算精度与效率,最后求解了平台的可达工作空间。研究表明:本文所提出的3-RRR球面光电稳定平台能够为光电设备提供全向姿态的稳定调控功能;根据本文所分析的工作空间这一运动特性可知,稳定平台的工作范围可以完全覆盖设计需求;所提出的有限阶积分法在并联机构正运动学计算、工作空间分析方面都表现出了良好的效果。
进一步展望文中所述的有限阶积分法,在计算过程中对于机构的运动轨迹实现了全面的解析,即该方法理论上可以应用于动平台的正向运动速度与加速度分析,以及通过驱动关节反馈的传感数据,对平台已经发生的运动进行轨迹追踪。综上所述,本文为光电稳定平台的机构设计与运动特性分析提供了借鉴与指导。
