一种智能餐桌的设计*
2023-10-21沙晋尧冯国红李秉衡饶韵晗
沙晋尧,冯国红,李秉衡,饶韵晗
(东北林业大学工程技术学院,黑龙江 哈尔滨 150040)
餐饮业是最直观、最典型的窗口行业[1]。后疫情时代下,社会经济发展环境更加具有复杂性和动态性,餐饮业需要居安思危,在明确自身社会责任的基础上,调整战略定位,从而积极迎接多变的挑战与机遇[2]。
近几年的突发公共卫生事件对学校的日常管理造成了极大的挑战,学校校园尤其是学校食堂是一个相对集中的地区,在后疫情时代,应该做好相应的防护措施,从事前预防、事中处置、事后恢复等方面制定相应的应急预案,并制定学校的应急资源调配计划。虽然学校实行错峰用餐、加强疫情防控、重视消毒等措施,但仍有一些问题,如个别学生无法在规定时间内就餐完毕,食堂消毒工作所消耗人力资源大,无法及时完成。因此,要想尽快地解决这一问题,就必须制定一套有效、低成本的解决办法。
目前,国内外已经提出多种在疫情背景下食堂就餐问题的解决方案,主要表现在优化排队、错峰用餐以及危险评估3 个方面。一是在优化排队问题上,学者们提出的解决方式有单列多台点餐的模式、拟合饭店的平均排队时间、求解运营费用和客户等待时间的权衡[3]。二是在错峰用餐问题上,有学者通过调查得出学生选择食堂及窗口并且导致餐厅拥挤的主要原因是离宿舍近、价格便宜、饭菜好吃等[4]。三是在危险评估方面,有学者建立了一种可以对食堂安全进行评估的扩展的元胞自动机(Cellular Automaton,CA),用于研究校园食堂在正常情况下和应急情况下的学生行为,从而对食堂安全进行评估[5],一些国外学者们提出了一种面向边缘的物联网体系结构、用价值-信念-规范(VBN)理论以及借助多智能体模拟(Multi-Agent Simulation,MAS)技术、二维元胞自动机(CA)和辅助决策工具对餐饮企业服务分析[6]。本文基于为减轻食堂用餐压力的目的,从设备设计的角度设计了一款可自动清理的餐桌。
1 智能餐桌整体方案设计
该智能餐桌整体分为检测剩余餐具装置部分、切换桌面装置部分、自动清洁装置部分。智能餐桌技术路线见图1。

图1 智能餐桌技术路线图
在检测剩余餐具装置的设计方面,桌板端的可升降摄像头启动,对桌面物品进行捕捉,利用计算机视觉技术将捕捉到物品的特征同已学习餐具的特征进行对比,若发现餐桌上有遗留餐具,则启动报警装置,装置的红灯闪烁,目的是提醒学生将餐具放回到指定清洁位置,避免装置对餐具的误处理。
在切换桌面装置的设计方面,待确保餐桌上未有遗留餐具后,红灯会熄灭,学生可以通过控制按钮启动桌面切换。本项目的餐桌是由传送带构成的,餐桌通过电机的主动力带动而顺时针或逆时针传送,上方餐桌(即使用过的餐桌)会传送至下方,下方餐桌即已清洁过的干净餐桌会传送至上方,从而实现了上下方桌面的切换。
在自动清洁装置的设计方面,分为刮板清洁结构设计、清洁组件结构设计、吸水海绵结构设计。刮板清洁结构设计在自动清洁装置的入口处,刮板可将桌面的表面垃圾处理至放在合适位置的垃圾桶中,为下一步深度清洁做准备。
清洁组件结构分为蒸汽发生装置结构与酒精喷洒装置结构,蒸汽发生装置用于产生蒸汽,酒精喷洒装置用于喷洒酒精,并且蒸汽发生装置产生的蒸汽驱使酒精上升附着在传送带式桌板表面,达到对桌面的深度清洁。吸水海绵结构设计在自动清洁装置的出口处,借助海绵与传送带式桌板的压力而达到对喷过蒸汽的桌面擦拭,完成自动清洁过程。
2 材料选择
在材料选择上,本装置所使用的材料——聚乙烯-醋酸乙烯酯(PEVA)常被应用于餐饮业,具有价格低廉且易购买、耐高温、无毒等优点,而且本装置桌面切换可以达到循环利用的效果,可以促进餐饮业发展。因此,本文拟选用PEVA 材料,用于餐桌装置。
3 自动清洁装置的机械结构及清洗过程
3.1 自动清洁装置整体结构设计
自动清洁装置整体结构分为3 个部分:刮板清洁结构、清洁组件结构、吸水海绵结构。图2 为自动清洁装置整体结构示意图。

图2 自动清洁装置整体结构示意图
餐桌主体设置有两个,两个餐桌主体并列设置,在两个餐桌主体之间设置有垃圾桶;餐桌主体包括桌体支架,桌体支架上侧设置有侧板,侧板内侧安装有传送带式桌板,桌体支架内安装有驱动传送带式桌板向垃圾桶方向运动的驱动装置;桌体支架内还安装有对传送带式桌板清理的清理装置。
3.2 组件设计
3.2.1 刮板清洁结构
传送带式桌板相互靠近的一侧设置有对传送带式桌板表面垃圾清理的刮板,刮板可将桌面的垃圾处理至放在合适位置的垃圾桶中。图3 为刮板清洁结构示意图。
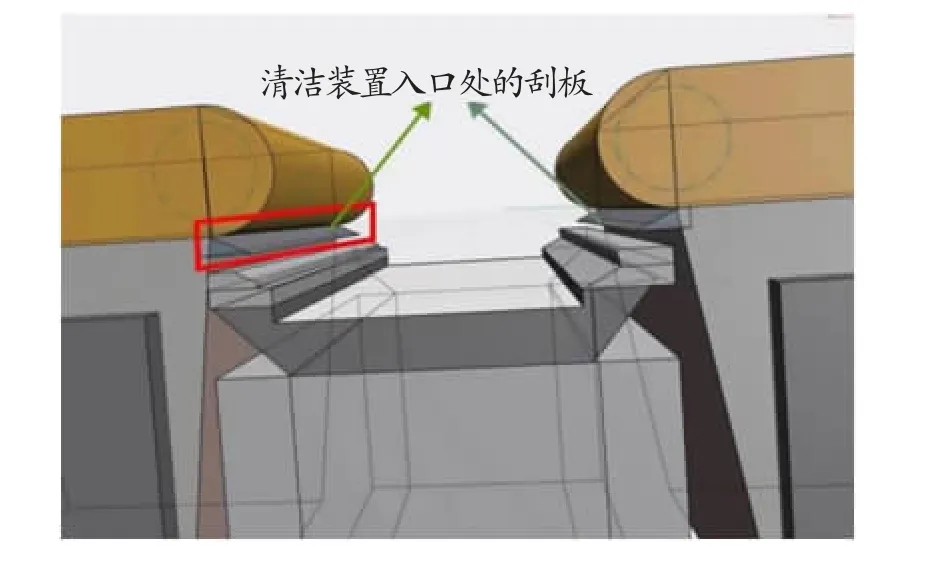
图3 刮板清洁结构示意图
3.2.2 清洁组件结构
清洁组件结构包括蒸汽清洗组件与酒精清洗组件。待桌面切换完毕稳定后,装置自动启动蒸汽清洗组件。通过蒸汽发生装置提供的蒸汽可附着在桌面上,由于酒精喷洒装置产生的酒精极容易气化,因此酒精会伴随蒸汽一起运动,做到了对传送带式桌板的喷洒。需要强调的是,此时已经清洁过的桌面已反转至上方,学生可立刻就座进行用餐,所有的清洁工作都可在学生用餐时进行,不会影响正常的用餐。图4 为清洁组件结构示意图。

图4 清洁组件结构示意图
3.2.3 吸水海绵结构
待学生用餐结束后,再一次启动装置运作时,下方的干净桌面会离开清洁区域,桌面将会先通过设置的吸水海绵,借助吸水海绵与传送带式桌板接触产生的压力,达到对喷过蒸汽的桌面的擦拭,随后桌面传送至上方,见图4。
4 计算机视觉技术检测
在进行餐桌清洁之前,一定要保证餐桌上没有餐具,利用计算机视觉技术检测餐具以避免装置对餐具的误处理。学生离开座位后,桌板端的可升降摄像头启动,对桌面物品进行捕捉,将捕捉到物品的特征同已学习餐具的特征进行对比,若发现餐桌上有遗留餐具,则启动报警装置,装置的红灯闪烁,提醒学生将餐具放回到指定清洁位置。直到餐桌上无餐具时,红灯熄灭,清洁系统开始工作。
5 结束语
智能化推动传统产业改革是现代人类文明的趋势,具有很大的潜力。餐桌的自动清理实现了学生在就餐之后的自动清洁工作,极大地减轻了食堂在清洁工作中的负担,降低了人工成本,也避免了学生因清洁工作未能及时进行而无法就座用餐等一系列问题。同时该装置可以提醒学生用餐后回收餐具,不仅保证了工作的正常进行,而且培养了学生餐后主动送回餐具的品德。
