基于模糊自适应指令分解的飞轮-火电一次调频控制策略
2023-10-21陈彪,王玮,高嵩,洪烽,房方
陈 彪,王 玮,高 嵩,洪 烽,房 方
(1.新能源电力系统国家重点实验室(华北电力大学),北京市 102206;2.国网山东省电力公司电力科学研究院,山东省济南市 250003)
0 引言
碳达峰和碳中和战略目标的提出,加快了电力系统向新型电力系统转型的步伐,以风电、光伏为代表的可再生能源大量并网。然而,可再生能源发电的间歇性和不确定性,对电网频率稳定性提出了新的挑战[1-2]。目前,火电机组调频存在调节速度慢、精度低等缺点,难以应对新型电力系统的频率稳定问题。因此,需要引入新的调频手段缓解火电机组调频压力[3-4]。
飞轮储能具有响应速度快、可频繁充放电、效率高等特点[5-7],在电网调频方面具有技术优势和经济可行性[8-9]。国外已有飞轮储能调频的工程实例,美国Beacon Power 公司于2011 年在纽约建成了世界上首座20 MW 大规模飞轮储能调频电站,并于2014 年建立了第2 座20 MW 飞轮储能调频电站[10]。文献[11]对宾夕法尼亚州飞轮调频电站项目进行了技术和经济性评估,验证了飞轮储能提供调频的可行性。近年来随着国家政策的推进,国内也开始建设飞轮储能调频示范工程。2021 年11 月中国能源集团灵武电厂飞轮储能-火电联合调频项目开工,该项目是国内第1 个全容量飞轮储能-火电联合调频工程,实现大功率飞轮单体工程应用[12]。2022 年8 月,华能莱芜电厂百万千瓦火电机组+飞轮储能示范项目正式启动。
目前,飞轮储能参与电网调频的研究已取得一些进展。文献[13]验证了飞轮辅助火电机组调频不仅能提高调频质量,而且还能降低主蒸汽压力波动。文献[14]采用虚拟下垂策略控制飞轮出力,分析了飞轮储能辅助火电机组一次调频效果。文献[15]提出基于提升华北电网考核指标的飞轮储能参与调频划分电量下垂控制策略,兼顾了一次调频考核和飞轮实时电量。文献[16]提出一种基于自适应协同下垂的飞轮储能联合火电机组一次调频控制策略,有效降低了频率最大偏差和稳态偏差。文献[17]提出了飞轮虚拟惯性控制策略,验证了该策略可以提高系统惯性,降低最大频率偏差和频率变化率。文献[18-19]提出了飞轮-火电一次调频协调控制策略,采用火电机组一次调频功率缺额控制飞轮出力,提升了电网频率稳定性和火电机组运行的安全性。以上研究验证了飞轮辅助火电机组调频的有效性,但存在以下不足:1)虽然建立了飞轮储能系统的数学模型,但是没有仿真分析飞轮充放电特性;2)飞轮储能系统一次调频出力控制策略多数为虚拟下垂或虚拟惯性控制,忽略了一次调频指令中高频分量导致机组出力波动的问题;3)仅对火电系统和飞轮+火电联合系统进行了调频效果分析,没有定量分析同等调频容量的飞轮和火电机组在调频过程中的能力贡献,以及对系统内其他机组的影响。
针对以上问题,本文首先建立飞轮-火电联合系统一次调频模型,并分析飞轮充放电特性。其次,提出联合系统协调控制策略,该策略包含滤波时间常数模糊自适应调整的一次调频指令分解方法和优先响应高频指令的飞轮储能系统控制。最后,构建等调频容量的火电系统和飞轮-火电联合系统模型,通过仿真验证所提策略有效性。
1 飞轮-火电联合系统一次调频建模
飞轮-火电联合系统由总计M台飞轮储能单元构成的飞轮储能系统和多台火电机组组成,多台火电机组等效后的联合系统一次调频模型见附录A图A1。图中:s为拉普拉斯算子;ΔPL为负荷扰动;Δf为系统频率偏差;KG为火电机组单位调节功率;KD为飞轮单元单位调节功率;Pj,ref为第j台飞轮单元的参考功率;Pj为第j台飞轮单元的实际输出功率;Gen(s)为汽轮机传递函数;GH(s)为火电机组调速器传递函数;G(s)为发电机-负荷模型传递函数。
1.1 火电机组模型
汽轮机传递函数为:
式中:TCH、TRH分别为汽轮机时间常数、再热器时间常数;FHP为再热器增益。
火电机组调速器传递函数为:
式中:TG为火电机组调速器时间常数。
发电机-负荷模型传递函数为:
式中:H为发电机惯性常数;D为发电机负荷阻尼系数。
1.2 飞轮储能单元模型
飞轮储能系统由飞轮阵列控制器和M台飞轮储能单元组成,见附录A 图A1。飞轮储能单元的电机 采 用 永 磁 同 步 电 机(permanent-magnet synchronous motor,PMSM),PMSM 在两相旋转坐标系下的数学模型如式(4)至式(6)所示。
电压方程为:
式中:ud、uq为定子电压d、q轴分量;id、iq为定子电流d、q轴分量;Ld、Lq为d、q轴电感;Rs为定子绕组电阻;ωe为转子电角速度;ψf为永磁磁链。
电磁转矩方程为:
式中:Te为电磁转矩;p为极对数。
转子运动方程为:
式中:J为转动惯量;TL为负载转矩;B为摩擦系数;ω为转子机械角速度。
1.3 飞轮储能单元控制
飞轮储能单元控制框图如图1 所示。
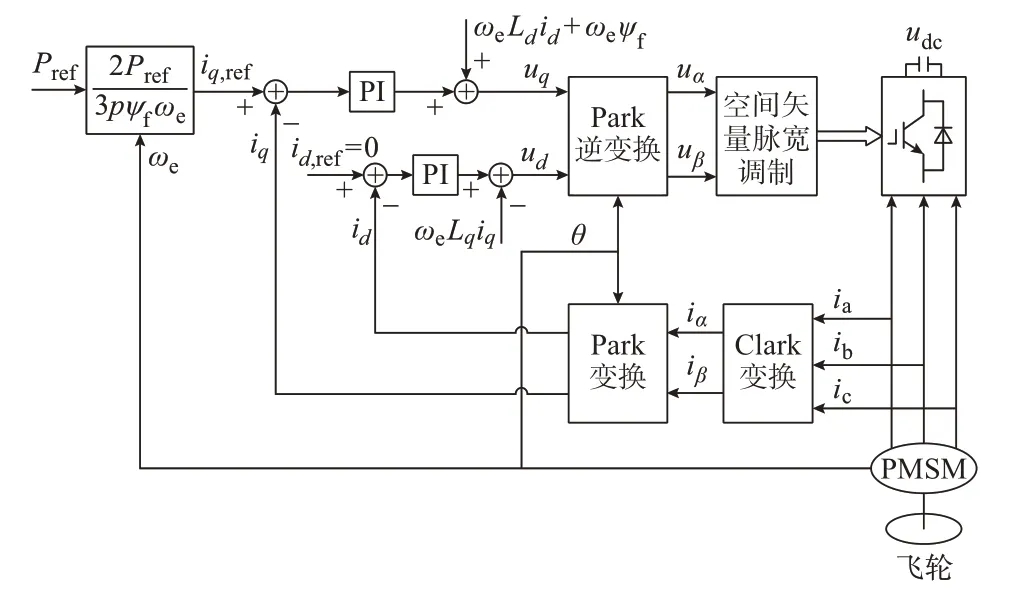
图1 飞轮储能单元控制框图Fig.1 Control block diagram of flywheel energy storage unit
图中:Pref为飞轮单元参考功率;iq,ref为q轴电流参考值;id,ref为d轴电流参考值;uα、uβ、iα、iβ、分别为α、β轴电压、电流;udc为直流母线电压;ia、ib、ic为三相电流;θ为电角度。
电流内环采用id=0 控制,该策略下没有直轴电枢反应,Te与iq呈线性关系,因此,只需控制iq就可以控制电机的转矩。此外,本文采用表贴式PMSM,Ld等于Lq,电磁转矩方程可以简化为:
由式(9)可知,将飞轮阵列主控制器下发的飞轮单元参考功率和飞轮实际转速代入其中即可得到内环电流参考值,然后电流内环控制q轴电流快速跟踪内环电流参考值,使飞轮输出功率达到参考功率。
为验证飞轮单体跟踪负荷的能力,对飞轮储能单元进行仿真实验。仿真中飞轮负载力矩为0,忽略变流器自身功率损耗,认为飞轮功率全部注入电网,变流器用时间常数为0.5 ms 的一阶惯性环节代替[20]。飞轮参数见附录B 表B1,仿真结果见图2。通过图2(a)可知,飞轮储能单元的输出功率可以快速准确地跟踪参考功率,从放大的曲线可以看到当飞轮参考功率发生改变后,到达给定值的时间小于0.05 s,验证了飞轮毫秒级的负荷跟踪能力。
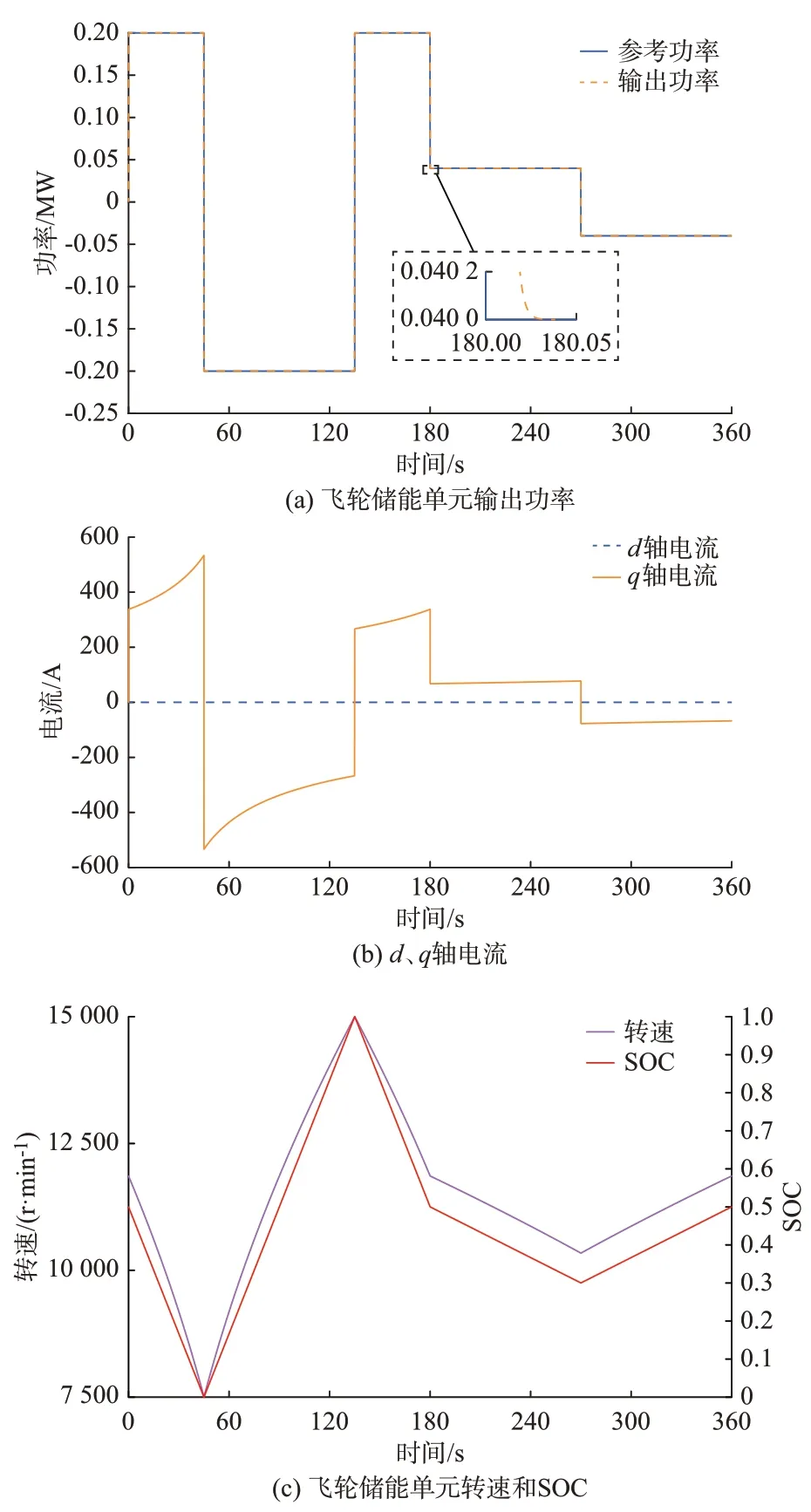
图2 飞轮储能单元动态特性Fig.2 Dynamic characteristics of flywheel energy storage unit
因为飞轮电流内环采用id=0 控制,所以从图2(b)中了可以看到d轴电流为0。在0~180 s,飞轮以额定功率充放电,结合飞轮转速曲线可以看到转速越低飞轮电流变化越大。180 s 以后进行小功率充放电,可以看到q轴电流变化幅度很小,与参考功率波形相似。
为了防止飞轮转速超出安全运行区间,延长飞轮的寿命,需对飞轮能量进行监测,将飞轮系统类比为电池系统,定义飞轮的荷电状态(state of charge,SOC)为:
式中:S(t)为t时刻的飞轮SOC 值;n(t)为t时刻飞轮转速;nmax为飞轮最大转速;nmin为飞轮最小转速。
结合图2(a)、(c)可知,当功率信号为正时,控制器使飞轮转速下降时,向电网输出电量,飞轮SOC 下降。功率信号为负时,则与之相反。飞轮转速的变化趋势与SOC 的变化趋势相同。
通过上述分析,建立的飞轮储能单元模型运行特性符合实际飞轮工作特点,具备毫秒级负荷跟踪能力,可以使用飞轮储能辅助火电一次调频,分担火电机组调频压力,提高联合系统负荷响应速度。
2 飞轮-火电联合系统协调控制策略
为了缓解火电机组一次调频出力频繁波动问题,在飞轮-火电联合系统一次模型基础上,提出飞轮-火电联合系统一次调频控制策略,包含滤波时间常数模糊自适应调整的一次调频指令分解方法和优先响应高频指令的飞轮储能系统控制。程序流程图如附录A 图A2 所示,整体框架如图3 所示。图中:PG为火电机组一次调频指令;PG,ref为火电机组理论应发功率;PH为一次调频指令高频分量;PL为一次调频指令低频分量;Pb为火电高频分量补偿值;Pf为飞轮虚拟下垂控制功率指令;Pa1为出力约束模块1的输出;Pr2为飞轮理论应发功率;Pa2为飞轮阵列参考功率;Pfess为飞轮阵列输出功率;PG,act为火电机组输出功率;T1为滤波时间常数。
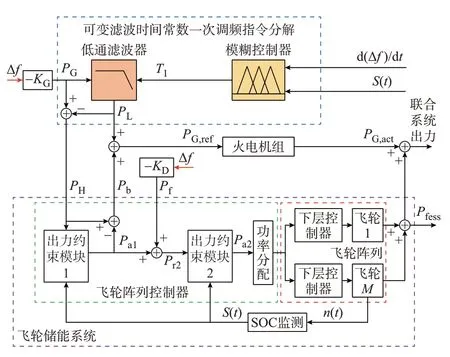
图3 一次调频协调控制策略Fig.3 Coordinated control strategy for primary frequency regulation
2.1 可变滤波时间常数一次调频指令分解
指令分解主要利用一阶滤波器实现,低通一阶滤波器具体表达形式如下:
式中:F(s)为一阶滤波器传递函数。
传统的低通滤波算法截止频率固定、控制简单,难以同时兼顾火电机组出力波动平抑和飞轮储能系统充放电安全。因此,本文在传统低通滤波算法的基础上,采用模糊控制算法根据系统频率变化率和飞轮SOC 自适应调整低通滤波器的截止频率,充分发挥飞轮“功率型”和火电“能量型”的功能特性。分频后的一次调频指令低频分量PL作为火电机组的调频指令,高频分量PH作为飞轮储能系统的调频指令。可变滤波时间常数一次调频指令分解如图3 中蓝色框所示。
2.2 模糊控制器设计
火电机组一次调频指令与系统频率偏差的关系如式(12)所示。
由式(12)知,频率变化直接反映了系统调频需求变化。从频率变化的角度看,当|d(Δf)/dt|增大时,说明调频需求波动加剧,此时应增大滤波时间常数,以达到平滑火电机组出力的目的。当|d(Δf)/dt|较小时,应适当减小滤波时间常数,减小飞轮出力,节约资源。
从飞轮SOC 角度看,当SOC 较高时,飞轮适合放电。若此时d(Δf)/dt大于0 且绝对值较大,虽然调频指令具有快速下降的趋势,需要飞轮大量充电,但是为避免飞轮出现过充现象,应减小滤波时间常数;若d(Δf)/dt小于0 且绝对值较大,需要飞轮大量放电,而此时飞轮正适合放电,应增大滤波时间常数。SOC 较低时,则与之相反。
根据上述分析,本文设计了两输入、单输出的模糊控制器,输入、输出变量的基本论域依据系统实际情况而定。频率变化率d(Δf)/dt的模糊论域为[-1,1],模糊子集为{ NB(负大),NS(负小),NZ(负零),PZ(正零),PS(正小),PB(正大)};SOC 值S(t)的模糊论域为[0,1],模糊子集为{ NB(负大),NS(负小),ZE(零),PS(正小),PB(正大)};滤波时间常数T1的归一化模糊论域为[0,1],模糊子集为{ NB(负大),NM(负中),NS(负小),NZ(负零),PZ(正零),PS(正小),PM(正中),PB(正大)};输入、输出量的隶属度函数如附录A 图A3 所示,模糊控制规则如附录B 表B2 所示。
2.3 飞轮储能系统控制
飞轮储能系统如图3 中紫框所示,主要包括飞轮阵列控制器、SOC 监测系统、由M台飞轮单元组成的飞轮阵列。飞轮系统的输入为PH和Pf,输出为Pb和Pfess。飞轮储能单元的模型和控制策略已在1.2 节和1.3 节介绍,本节主要介绍优先响应火电高频指令的飞轮储能系统控制策略,即飞轮储能阵列控制器的具体实现。飞轮阵列控制器如图3 中绿框所示,由2 个出力限制模块和1 个功率分配模块组成。
为防止飞轮过充、过放,在出力限制模块中引入以S为自变量的Logistic 回归函数对飞轮出力限制,该函数表达式[14]为:
式中:Pd为放电功率;Pc为充电功率;Pmax为飞轮储能系统最大输出功率;Smax为SOC 最大值;Smin为SOC 最小值;K1、P0、P1、b、r为常量。
出力控制模块的输入为参考功率Pr和SOC 值S,经过限制后的出力约束模块输出Pa为:
为最大限度平滑火电机组出力,减少机组磨损,使飞轮储能系统优先响应一次调频指令中的高频分量,策略流程图如附录A 图A2 红框所示。如果高频分量小于飞轮出力裕量,火电机组无需补偿。如果高频分量大于飞轮出力裕量,出力约束模块1 将对高频分量进行限制。飞轮无法承担的部分由火电机组进行补偿,火电高频分量补偿值Pb的计算公式为:
此时,火电机组理论应发功率PG,ref为:
出力约束模块1 的输出Pa1与飞轮虚拟下垂功率指令Pf两者之和构成了飞轮理论应发功率Pr2,其计算公式为:
出力约束模块2 的输入为飞轮理论应发功率Pr2,输出为飞轮阵列参考功率Pa2。为简化分析,设定飞轮阵列中的各台飞轮储能单元参数和运行状态完全相同,功率分配器采用等功率分配策略,则每台飞轮单元参考功率Pref为:
3 仿真分析
3.1 系统描述
为定量分析飞轮储能对火电机组一次调频能力的提升贡献,需维持飞轮-火电联合系统的调频容量与原火电系统保持一致。因此,考虑所研究的飞轮-火电联合系统,用具有相同调频容量的飞轮储能来替代火力发电,构成等调频容量的飞轮-火电联合系统,则所需的飞轮储能的容量Pmax为:
式中:Pg为火电机组装机容量;k为火电机组一次调频限幅,取值范围6%~10%[21]。
飞轮-火电联合参与电网调频的电力系统示意图见附录A 图A4(a)。基于上文研究,在Simulink中建立如图A4(b)所示的同等调频容量的飞轮-火电联合系统一次调频仿真模型,仿真模型中的飞轮储能单元采用经图1 简化后的模型。
假设火电系统由5 台200 MW 一次调频限幅10%(调频容量20 MW)的火电机组组成,为保证联合系统与火电系统调频容量一致,联合系统关闭1 台火电机组的一次调频功能,将其用于增加飞轮储能容量。此时,图A4(b)中参与一次调频的火电机组装机容量为800 MW,飞轮储能容量为20 MW。考虑工程可实现性,采用额定功率为200 kW,存 储 电 量 为5 kW ⋅h 的QFFL200-60-1/15M 飞轮单体组成20 MW 的飞轮阵列,此时飞轮存储电量为0.5 MW ⋅h。
文献[22]指出对于0.015~0.2 Hz 频段内的功率波动,火电机组一次调频起主要调节作用。因此,设置滤波时间常数T1的最大值为10,其基本论域为[0,10]。设定系统功率基准值为1 000 MW,频率基准值为50 Hz,火电机组和飞轮的一次调频死区为0.033 Hz,其余系统参数按照基准值标幺化,详细参数见附录B 表B3。
分别在阶跃负荷扰动和连续负荷扰动2 种典型工况下,对Simulink 中搭建的纯火电系统、虚拟下垂控制(简称下垂控制)下的飞轮-火电联合系统以及本文策略下的飞轮-火电联合系统开展仿真,对比分析各系统的仿真结果,验证所提策略有效性。
3.2 阶跃扰动工况
t=0 s 时,加入20 MW 的阶跃扰动,仿真时间30 s,得到的频率偏差见图4(a),系统总输出功率见图4(b),20 MW 调频容量的飞轮与火电机组输出功率见图4(c),4 台火电机组输出功率见图4(d)。
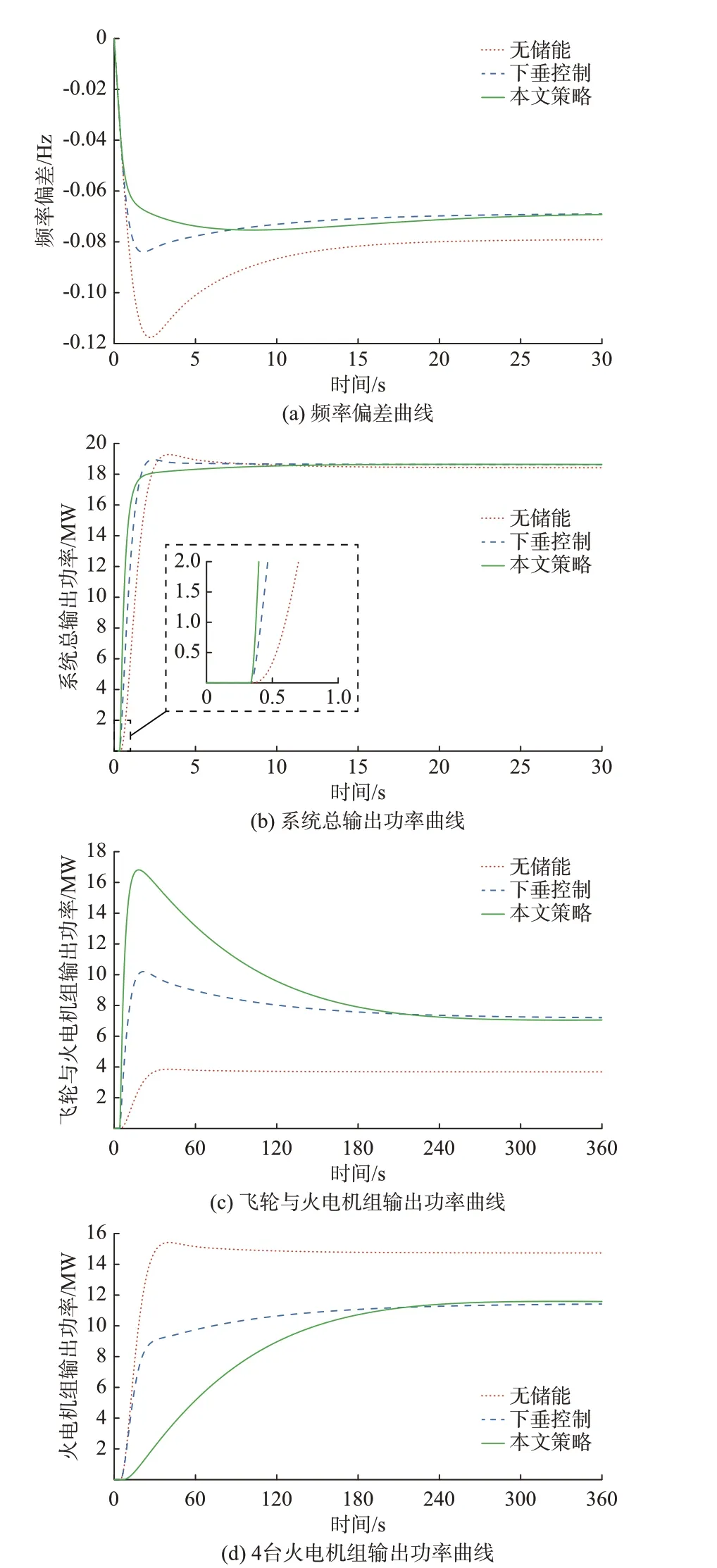
图4 阶跃负荷扰动工况Fig.4 Working condition with step load disturbance
由图4(a)可知,加入飞轮后的联合调频系统可以有效减小最大频率偏差和频率稳定值。表1 为阶跃负荷扰动下的频率评价指标,其中,|Δfmax|为最大频率偏差;Δfs为稳态频率偏差。相比下垂控制策略,本文策略对系统频差的抑制作用更强,最大频率偏差降低了10.71%;在频率恢复方面,本文策略与下垂控制策略的稳态频率偏差一致,较无储能降低了12.67%。可见本文策略下的飞轮-火电联合调频系统,可以更好地保障系统频率稳定。
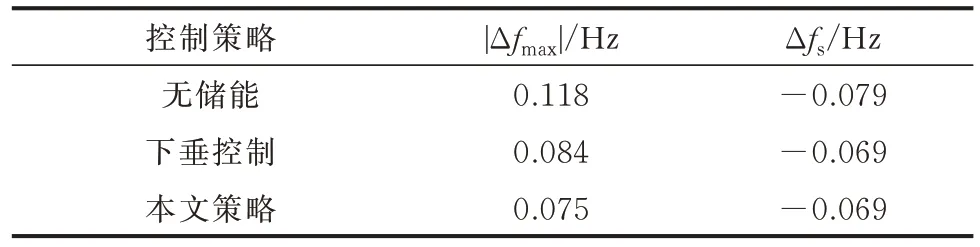
表1 阶跃负荷扰动下的系统频率评价指标Table 1 System frequency evaluation indices under step load disturbance
由图4(b)可知,飞轮-火电联合调频系统总输出功率响应速度更快。表2 为阶跃负荷扰动下的出力评价指标,其中:td为滞后时间;tup为上升时间;ts为调节时间;R为爬坡率;ys为稳态输出功率。
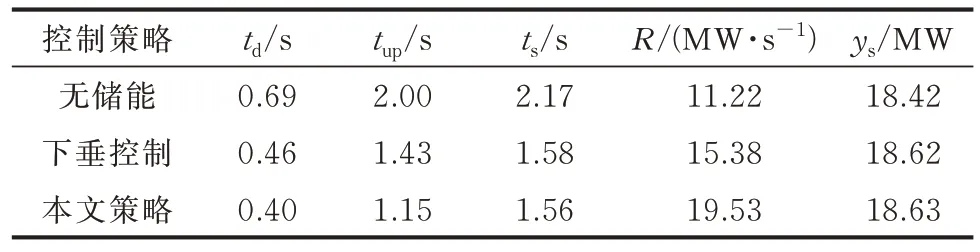
表2 阶跃负荷扰动下的出力评价指标Table 2 Output evaluation indices under step load disturbance
从表2 中可以看出,本文策略输出功率滞后时间、上升时间较下垂控制策略分别缩短了0.06 s、0.28 s,降低幅度分别为13%、20%。本文策略爬坡率较下垂控制提升了27%。综合来说,联合系统一次调频响应时间指标和爬坡率明显优于无储能系统,此外,本文策略的出力指标优于下垂控制。
飞轮-火电联合系统出力指标优于仅火电调频系统的原因如图4(c)所示。当频率刚发生变化时,飞轮快速响应,短时间内输出功率达到峰值,释放出存储的电量。本文控制策略下,飞轮输出功率在1.51 s 达到峰值,同等调频容量的火电机组输出功率在3.37 s 达到峰值,且飞轮最大输出功率是火电机组的4.3 倍。
图4(d)为各策略下4 台参与一次调频的火电机组功率输出曲线,无储能辅助火电时,火电必须以较高的爬坡率输出,来抑制系统频率变化,其输出功率在3.4 s 达到最大值并且存在超调。当飞轮辅助火电机组调频时,飞轮在短时间内提供大量有功功率,使得联合系统内的火电机组出力明显减缓,并且没有出现超调。下垂控制策略下的火电输出功率先以较快速率上升,当频率偏差达到最大值后,火电输出功率缓慢上升。本文策略下的火电机组输出功率始终以较小速率上升,说明本文策略可充分利用飞轮输出功率大、响应快的优势,为火电机组分担调频压力。
综合图4(c)和4(d)可知,在频率变化初期,飞轮输出功率大于同等调频容量的火电机组的输出功率,此时,飞轮的能量贡献大。随着火电机组输出功率的增加,飞轮和火电机组的出力逐渐趋于恒定,此时,飞轮的能量贡献趋于定值。
为分析同等调频容量的飞轮和火电在不同时段的能量贡献情况,以及对系统内其他4 台火电机组调频压力分担情况,引入短时积分电量Qm和长时积分电量Qs,通过对t0~tm和tm~ts时间段内各调频资源的出力积分获得Qm和Qs。t0、tm分别为火电调频起始时刻、频率峰值时间。各策略下的能量贡献指标如表3 所示,其中,Qm1、Qs1分别为各系统内20 MW调频资源(无储能是火电,下垂控制与本文策略是飞轮)的短时积分电量、长时积分电量,Qm4、Qs4分别为系统内其他4 台火电机组的短时积分电量、长时积分电量。从中可以看到,本文策略和下垂控制策略下的飞轮短时贡献电量分别是无储能策略下等调频容量火电机组的7.8 倍、4.4 倍,长时贡献电量分别是无储能策略火电机组的3 倍、2.3 倍,本文策略下的4 台火电机组短时贡献电量明显小于仅采用火电调频的系统。可见,飞轮储能对系统的能量贡献主要在频率变化初期,飞轮储能前期贡献电量越多,火电机组的出力越平缓,越能发挥飞轮短时间尺度出力特性和火电长时间尺度出力特性。
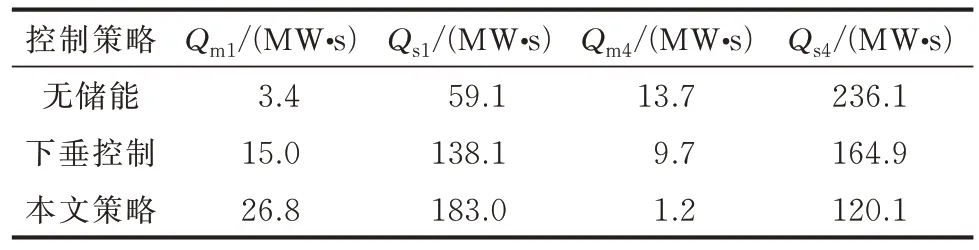
表3 能量贡献指标Table 3 Energy contribution indices
3.3 连续扰动工况
为验证在风电负荷扰动下飞轮-火电联合系统一次调频效果,选取某风电场一天中波动范围较大的5 min 实际风电功率波动作为连续负荷扰动。风电功率波动曲线见附录A 图A5。
连续扰动下系统频率偏差、20 MW 调频容量的飞轮与火电输出功率、滤波时间常数、飞轮SOC、4 台火电输出功率、飞轮转速、q轴电流变化情况,如图5 所示。
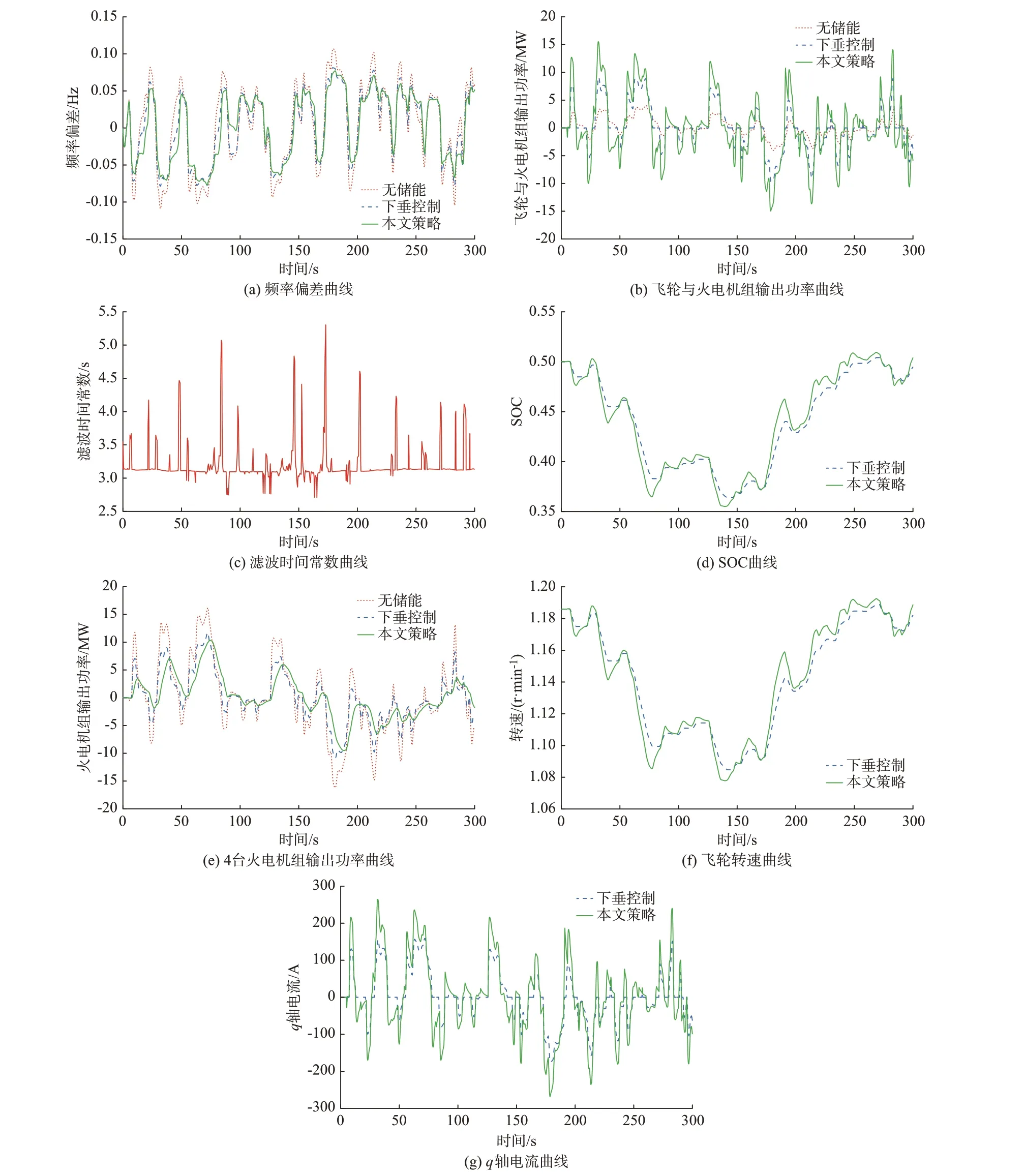
图5 连续负荷扰动工况Fig.5 Working condition with continuous load disturbance
由图5(a)可知,连续扰动工况下,相比于无储能策略和下垂控制策略,本文策略的系统频率偏差的峰值分别由0.107 Hz、0.082 Hz 降低到0.077 Hz,分别降低了28.0%、6.1%,频率变化量的标准差由0.055 Hz、0.046 Hz 减小至0.044 Hz,说明利用飞轮辅助调频可以有效减小频率波动,此外,本文策略比下垂控制策略具有更好的频率控制效果。
图5(b)中红色曲线是与飞轮等调频容量的火电功率输出曲线。由图5(b)可知,下垂控制策略下,飞轮输出功率变化量峰值由火电的4.0 MW 增加到9.1 MW。在本文控制策略下,变化量峰值进一步增加到15.5 MW。说明在连续负荷扰动下,飞轮可以快速地充放电抑制系统频率变化,且本文策略较下垂控制更能发挥飞轮短时间尺度出力特性。
图5(c)为滤波时间常数变化曲线,可以看出其在仿真过程中按照设定的规则在不断的变化。由图5(d)可知,本文策略的SOC 曲线波动比下垂控制策略大,这是因为本文策略为更好地调频,在一些情况下飞轮出力比下垂控制更大;本文策略可以兼顾调频效果和飞轮SOC 的恢复。如在140~150 s 时间段内,SOC 的值比较低,飞轮有充电倾向,而此时系统也需要飞轮充电。从图5(c)中可以看到,滤波时间常数增大,飞轮承担了更多的高频分量,促进了飞轮电量恢复。正如图5(d)中所示,在此时间段内,本文策略的SOC 上升幅度大于下垂控制。因此,本文策略的SOC 自恢复能力优于下垂控制。
从图5(e)中可以明显看到本文策略下,火电机组的出力更平滑,无储能时火电输出功率波动约56 次,下垂控制策略波动约44 次。本文策略波动约30 次,较无储能和下垂控制分别降低了46.4%、31.8%。综上,本文控制策略可以有效抑制高频信号导致的火电机组输出功率反复波动现象,平滑火电机组输出功率,有效缓解了火电机组的调频压力。
由图5(f)可知,在连续负荷扰动下,飞轮转速变化情况与SOC 变化趋势相同。整个调频过程中飞轮转速在10 000 r/min 以上,大功率长时间充、放电情况较少,q轴电流变化与飞轮输出功率变化基本一致。
为进一步探究本文所提策略的有效性,在MATLAB 中生成幅度范围为[-10,10]MW 的随机序列作为各系统的连续小负荷扰动。连续小负荷扰动、频率偏差、飞轮SOC、同等调频容量的飞轮与火电输出功率、4 台火电机组输出功率变化情况如附录A 图A6 所示。从频率偏差曲线中可以看到飞轮参与调频的系统频率偏差小于无储能系统,调频效果优于无储能系统。从火电机组输出功率曲线中可以看到,本文策略下的4 台火电机组输出功率波动明显小于其他两种策略,本文策略亦适用于连续小负荷扰动。
4 结语
本文提出了一种基于模糊自适应指令分解的飞轮-火电一次调频协调控制策略,实现了联合系统对含高低频复杂调频指令的灵活响应。以等调频容量的飞轮-火电联合系统和火电系统进行了对比仿真分析,由仿真结果得出如下结论:
1)飞轮对频率变化的响应速度远快于火电机组,可有效提高系统调频性能;
2)飞轮能量贡献主要在频率变化初期,飞轮前期贡献电量越多,火电机组出力越平缓;
3)本文策略下,飞轮优先响应火电调频指令中的高频分量,能够有效减少机组动作次数。
本文仿真是在系统调频容量一致前提下开展的,且未对飞轮容量配置问题进行深入研究。下一步将在多场景下进行飞轮-火电联合系统调频效果对比分析,并开展调频容量配置的研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
