基于动态耦合分析的武装直升机火/飞协同机制研究
2023-10-20王玉惠郭钟格
庞 东,王玉惠,*,王 刚,郭钟格
(1.南京航空航天大学自动化学院,南京 211106;2.光电控制技术重点实验室,河南 洛阳 471009)
0 引言
现代战争的战场环境愈发复杂,适应能力强、机动性高的武装直升机越来越受到各个国家的重视,尤其是对武装直升机的精确火力攻击有了更高标准的要求。目前,武装直升机武器系统的研究多集中在可控类制导型武器,对于非控型武器瞄准攻击问题的研究较少[1-2]。对于非控型武器,多采用横/纵向PID 控制方法进行火/飞耦合器设计,其不足在于将武器线角与载机姿态角进行直接转换,且对于火控方程的求解缺乏理论指导[3],并不能满足实际战场的需求。神经网络[4]和多重递阶结构设计方法[5]也被运用于设计综合火/飞控制系统,但均未考虑到武装直升机非控型武器攻击瞄准过程中存在的武器线指令和姿态指令信号之间的交叉耦合问题,对载机姿态调整对攻击瞄准影响的问题缺乏深入研究。
显然,综合火/飞控制系统中的火力控制系统和飞行控制系统必然存在一定的耦合,且会对攻击效果产生一定的影响。但目前关于耦合分析主要集中在飞行器姿态和气动耦合方面。对于武装直升机火/飞耦合问题,直接基于采样统计的耦合度分析方法[6-7]并不适用。
因此,借鉴文献[6]和文献[8]中的耦合度定义,分析火/飞耦合关系,基于动态耦合分析方法[9-10]建立了耦合度矩阵。由于涉及数据较多且处理复杂,通过定义可忽略耦合与不可忽略耦合的概念[11]来简化分析过程。此外,基于非线性规划理论[12],采用改进的共轭梯度算法[13],对火控方程进行求解,同时基于强wolfe 线搜索方法[14-15]以保证算法的收敛性,最终得出符合要求的火/飞协同机制。仿真结果验证了算法的可行性和有效性。
1 IFFC 系统下的武装直升机火控解算
1.1 武装直升机IFFC 系统
武装直升机空对地攻击(integrated flight fire control,IFFC)系统结构如图1 所示。

图1 武装直升机IFFC 基本结构Fig.1 Basic structure of armed helicopter IFFC
由图1 可知,武装直升机IFFC 系统的控制过程为:首先,通过地面站或机载探测系统获取目标运动状态信息,持续跟踪目标,将目标状态信息和直升机状态信息送入火控解算系统,解算结果输入到火/飞耦合器;其次,通过火/飞耦合器得到飞行控制指令信号和武器随动指令信号;最后,根据指令信号设计飞行控制系统和武器随动系统的制器,使得在攻击目标的同时保证直升机的飞行稳定,以达到最终实现自动攻击的目的。
1.2 武装直升机空对地CCIP 火控解算
CCIP 火力控制原理是机载火控计算机不间断地计算出当前时刻武装直升机使用航炮、火箭弹等非控型武器,对地面目标进行攻击时在地面上的命中点位置。
在地理坐标系中建立瞄准状态的空对地射击矢量图如图2 所示。

图2 武装直升机CCIP 火控矢量图Fig.2 Fire control Vector graph of armed helicopter CCIP
其中,Td为武器弹丸飞行时间。表达式为:
将矢量方程式(1)~式(4)向机体坐标系的三轴投影,可以得到:
1.3 瞄准误差分析

图3 武装直升机攻击误差分析矢量图Fig.3 Vectordiagram of attack error analysis for armed helicopters
设:
结合式(9)和式(10)可得:
2 武装直升机火/飞协同耦合分析
2.1 动态耦合原理
根据式(12)~式(14)可知,综合火/ 飞控制系统是复杂的非线性系统,且变量之间彼此关联,其中,武器线指令和姿态指令信号之间存在交叉耦合,在攻击目标过程中,这种耦合会对攻击精度和直升机的飞行安全产生不可避免的影响。
动态耦合原理定义如下:
基于上述定义,在基本耦合度矩阵的基础上,对其进行标准化、归一化处理,可给出综合火/飞控制系统的耦合度矩阵。
2.2 综合火/飞控制系统耦合分析
其中,FX、FY、FZ分别表示动态耦合度矩阵F 在机体坐标系3 个坐标轴方向下的分矩阵。
由于上述矩阵计算得到的数值变化范围过大,因此,在式(19)~式(21)的基础上进行耦合度矩阵归一化。建立归一化耦合度矩阵:
基于已有的归一化耦合度矩阵GX、GY和GZ,对其进行标准化处理,具体处理表达式如下:
其中,sqrt 表示计算平方根。系统的归一标准化耦合度矩阵为:
为了确定间接耦合关系的动态变化过程,并验证G 的合理性,需要分析不同动态下的矩阵G。由于3 个飞行姿态信号在一定范围内的动态变化,考虑姿态角信号从0°~30°变化,进而分析间接耦合关系在不同条件下的动态耦合度。仿真结果如图4 所示,其余动态耦合曲线的建立方法类似。
通过仿真结果分析可得如下结论:
通过上述分析,结合武装直升机飞行和对地攻击的实际情况,可以看出该动态耦合分析方法符合武装直升机攻击特点。
3 火/飞协同分析计算
3.1 火/飞协同机制
根据上述火/飞动态耦合分析的结果,确定武装直升机综合火/飞协同机制如下:
1)为了提高武装直升机攻击过程中操纵性,应当尽量减少负面耦合对瞄准的影响。由耦合度分析可知,首先应当确定滚转角的角度调整区间,将限定在小角度变化区间-≤≤内,其中,由变化过程中相对应的间接耦合通道耦合度所确定,随着发生变化,其所对应、间接耦合通道的耦合度也发生变化。因此,根据动态耦合影响定义耦合度阈值Ge,当某通道耦合度Ge满足时,认为该通道处于弱耦合状态,否则为强耦合状态。基于耦合度阈值Ge,取使得、通道耦合度满足式(27)条件的最大滚转角作为。
3)最终确定武装直升机对地攻击过程中姿态信号的调整区间如下:
3.2 协同指令求解
基于已有的火/飞协同机制,采用约束优化的罚函数方法,将约束条件的违反度作为惩罚项加入到目标函数来建立罚函数。采用倒数障碍函数,构造罚函数如下:
其中,k 为迭代次数,ε 作为阈值,为一个较小的正数。参数的更新迭代方程为:
由式(41)可得:
4 仿真分析
为了验证算法的合理性和有效性,利用MATLAB 平台进行如下仿真分析:
通过图5 可以看出,偏航指令信号角度变化相对较大,且其调整过程一直保持在设定的调整区间内;通过图6 可以看出,俯仰指令信号同样类似于偏航指令信号角度的变化,在保证了飞行操纵性的同时,有利于保证攻击的快速性,符合飞行攻击实际;通过图7 可以看出,攻击目标时载机的滚转指令信号一直保持在小角度调整区间内,保证了飞行过程中的稳定性。在通过火/飞协同机制得到合理的飞行指令信号的同时,每一时刻的姿态指令信号都满足了耦合度分析对飞行信号限定的直升机姿态动态调整区间,使飞行姿态操纵稳定性得到保障,更加符合武装直升机的实际飞行条件,验证了该火/飞协同机制在武装直升机攻击瞄准过程中的可行性。
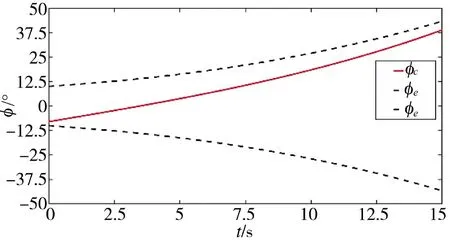
图5 偏航姿态指令信号曲线Fig.5 Signal curve of yaw attitude commands
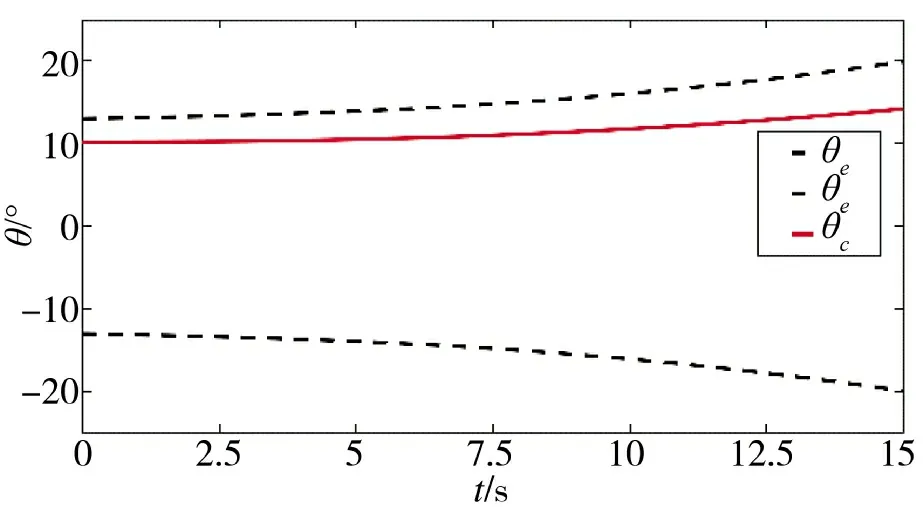
图6 俯仰姿态指令信号曲线Fig.6 Signal curve of pitch attitude commands
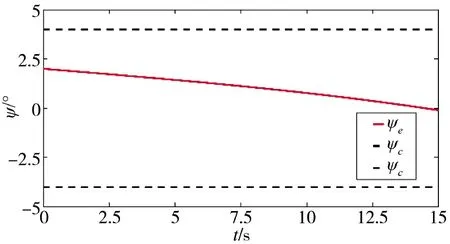
图7 滚转姿态指令信号曲线Fig.7 Roll attitude command signal curve
5 结论
针对武装直升机非控型武器空对地攻击地面目标问题,在CCIP 火力控制原理的基础上研究了非控型火控指令信号与武装直升机飞行姿态信号之间的耦合问题,为该类武器瞄准火/飞协同机制的确定和优化提供了可参考的耦合数据。结合耦合度分析、罚函数以及共轭梯度方法进行火/飞协同机制的解算,并通过MATLAB 平台对该机制进行仿真分析,通过仿真得到了耦合分析基础下的武装直升机非控型武器攻击地面目标的姿态调整区间,以及相应时刻与位置下的姿态指令信号,为武装直升机非控型武器空对地攻击目标时火/飞协同机制的建立与解算提供了参考,也对固定翼战斗机的火/飞协同机制的研究具有借鉴意义。
