无人机地面控制站软件通用化研究
2023-10-19何文志
何文志
(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)
0 引 言
地面控制站是无人机[1-4]系统控制的核心,可以完成对无人机的视距和超视距控制,它作为无人机系统控制的核心,在无人机系统的任务准备阶段、关键任务执行阶段直到最后的事后分析阶段都承担着重要工作。地面控制站完成对无人机的控制,监视无人机的飞行状态和有效载荷的工作状态,实现对无人机的远距离操纵以及信息的实时监视、记录、分发[5-10]。它的核心功能主要由软件系统实现,一般包括任务规划、飞行监视与控制、任务载荷监视与控制、链路监视与控制、综合数据管理和情报分发等。
任务规划的功能是:接收下达的无人机侦察任务,生成无人机侦察计划;根据飞行侦察任务的要求,制定出若干条可能的飞行航线,并生成相应的航线装订数据;同时依据接收到的无人机位置信息,在数字地图背景下绘制飞行轨迹。
飞行监视与控制的功能是:实现对无人机的操纵和监视,完成无人机飞行控制指令生成和发送,完成无人机遥测数据的接收和监视。使操作员在操作席位上可以监视无人机的航迹、飞行姿态、飞行状态、设备状态等;辅助完成无人机飞行控制。
任务载荷监视与控制的功能是:实现对无人机任务载荷设备的操纵和监视,完成无人机任务载荷(CCD、SAR、照相机等)控制指令的生成和发送、载荷状态数据的接收和监视。使操作员在屏幕上可以观看实时传回的侦察图像信息,实时优化任务载荷的工作状态。
系统监控的功能是:监控无人机各数据链设备的工作状况及链路工作状况,完成链路控制和设备管理;通过人工干预或自动控制使无人机与地面站之间保持稳定、可靠、高速的双向通信。
综合数据管理主要是记录各种原始数据和过程数据,供系统做事后分析,可实现数据记录、数据管理、数据检索和数据回放等功能。记录的主要数据有遥测数据、原始图像数据、控制数据、链路监控数据等。
情报分发功能是指地面控制站可以将情报信息通过通用接入分发设备发送到公共通信系统的情报应用节点,实现侦察数据的广域共享。
无人机地面控制站基本上都是基于专用的硬件平台和软件平台,多数无法实现不同型号之间无人机共用,而软件作为地面控制站的核心,同样面临如何实现通用化的问题。文献[11]提出了一种采用平台+插件的软件架构,并分析了软件架构、基于XML 技术的帧格式信号和参数信息描述、动态报文解析和组包、软件界面定制等关键技术。文献[12]设计与实现了任务规划与控制演示系统。文献[13]对控制站中的监控软件的典型应用进行了功能分配。文献[14]进行了航迹规划体系和在线航迹规划算法研究。相关文献主要是解决地面控制站软件如何具体实现,而本文面向无人机通用地面控制站建设,通过分析地面控制站软件通用化技术途径,建立了基于DDS 的地面控制站软件架构,给出了按照通用模块和专用模块划分的通用地面控制站软件模块。
1 软件通用化技术途径
1.1 软件通用处理
对于不同类型的飞机,地面控制站软件通过事先配置好的相应飞机的资源信息库(主要包括遥控帧信息、遥测帧信息、指令码表信息、遥测参数信息等),由通用数据处理模块进行统一处理。当帧的格式发生变化时,无需再对程序代码进行修改,仅需修改资源信息库的内容,即可使软件适应新的数据协议的需要。对于界面显示模块,设计时应该尽量保证不同飞机的一致性,由底层软件区别飞机的处理,在显示层设计为通用化的显示。
1.2 操作界面的通用设计
对于界面显示,采用模块化窗口的设计方法。本文将航迹显示、图像显示、仪表三姿显示、任务平台俯仰、方位仪表显示等设计成为通用的模块;同时对于其他遥测参数的结果,通过分析各型号无人机地面控制站软件操作界面,找出界面的共同点和特殊点,针对共同点进行通用设计,针对特殊点地面控制站软件可进行灵活配置,通过界面在线配置和界面配置库实现通用。
界面显示窗口的大小、位置都可以进行调整,并且窗口中显示的内容也都根据不同飞机定制的内容自动变化,每一个窗口元素都可以通过选择显示任意的参数。通过这种模块化窗口的设计可以适应不同类型无人机的需求。
1.3 DDS 中间件技术
采用DDS 中间件技术将应用层与底层隔离开,使得应用层和底层具备通用、互换、即插即用特性。DDS是一种架构在协议层和应用层之间的中间件技术,它将API 和UDP/IP 进行封装,通过对数据进行分类,以及对软件之间的交互模式进行标准化定义,实现应用层软件之间更实时、准确、快捷的交互。
1.4 信息接入与分发的通用设计
采用模块化方法设计一个独立的软件,专门负责广域网信息接入与分发。该软件对内作为客户端,可获取系统内部各种数据;对外作为服务器,可以向远程客户端分发数据。
信息接入与分发模块对传输协议和信息格式进行标准化设计,采用标准TCP/IP 协议将遥测信息、数据文件等与远端的情报处理终端或者指挥中心进行收发。
2 基于DDS 的地面控制站软件架构
2.1 OMG DDS 规范
DDS 是OMG 组织下的国际标准[15],DDS 规范了分布式实时系统中数据发布、传递和接收的接口和行为,定义了以数据为中心的发布/订阅(Data-Centric Publish/Subscribe, DCPS)机制,提供了一个与平台无关的数据模型,该模型能够映射到各种具体的平台和编程语言。DDS 规范的目的是简化分布式系统中数据的有效发布,它主要应用在要求高性能、可预见性和对资源有效使用的关键任务领域。DCPS 层是DDS 规范的核心,它提供了数据发布的基础架构。DDS 信息分发中间件是一种轻便的、能够提供实时信息传送的中间件技术。
按照DDS 规范实现的网络中间件集成了DDS API,能够提供高度故障冗余并降低设计风险,减少初始开发与整体系统的成本。DDS 还在平台、语言与传输机制方面提供了更大的灵活性,其可靠性与灵活性可满足仿真、电信、工业自动化、医疗设备以及航空设备等应用的需求。 基于DDS 规范的开发人员可设定多种QoS 策略,如发布/订阅速率以及通过网络的数据长度等。DDS 网络中间件利用DCPS 模型的功能为实时与嵌入式系统提供高质量的运行保障,尽可能地降低数据复制的需要,从而提高系统性能,同时还允许应用预分配资源提高可靠性和实时确定性。
DDS 总体架构如图1 所示。
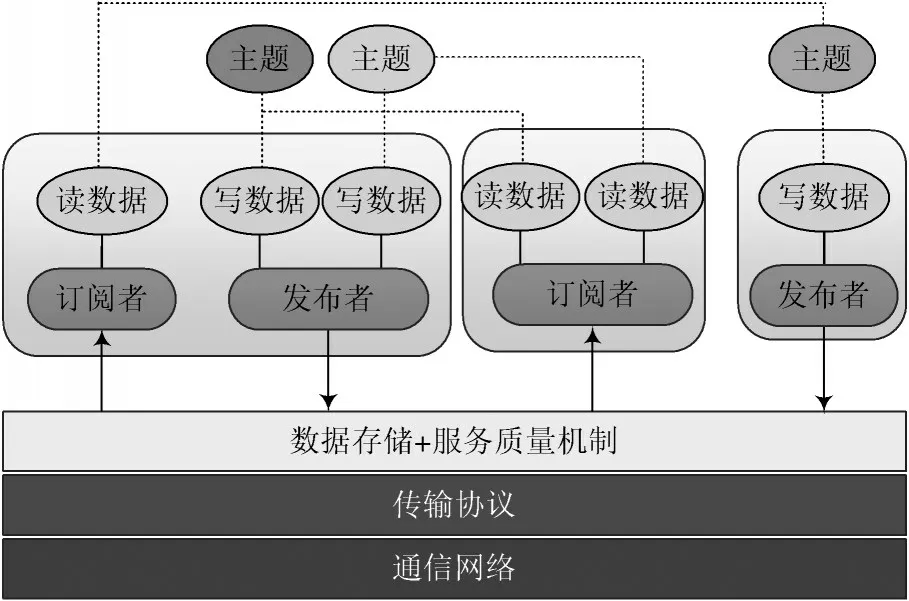
图1 DDS 总体架构
DDS 可以向系统提供以下服务:
1) 可以提供实时的数据分发服务;
2) 可以实现上千个参数的监控与分发,变量长度非常小,发送频率快;
3) 可以适应各种刷新频率不一样的数据,最高频率能到每秒千次,通过QoS 实现其同步控制;
4) 实现动态发布和订阅数据,不再依赖固态的网络结构;
5) 完全实现以数据为中心,应用层与传输层隔离,大幅度减小开发的工作量;
6) 提供强大的QoS 策略来保证系统稳定运行;
7) 大数据量的情况下,可以通过QoS 策略实现数据的压缩以减小网络开销,支持多种硬件平台、操作系统和编程语言,易于扩展。
2.2 基于DDS 规范的地面控制站软件架构
目前的无人机地面控制系统中软件体系架构一般采用服务器-客户端模式,在通用化和扩展性方面存在以下几个问题:
1) 各个软件模块之间的接口路径固定,模块间依赖性强,灵活性差;
2) 系统难以扩展,增加新模块和删除已有模块需要较多的工作量;
3) 现有的服务器-客户端架构存在单个模块失效,可能会导致系统崩溃的危险,需要采用更好的QoS 策略来保证系统的稳定运行;
4) 各地面站、各无人机系统之间难以实现信息、情报共享。
DDS 中间件作为地面控制系统的“软总线”,负责系统内的数据分发,可以使系统开发者有更多的精力处理系统逻辑部分。DDS 中间件适用于大型控制系统中,特别是严苛的军事系统中。DDS 作为中间件,产品的核内延时一般小于10 μs。通用地面控制站软件采用基于DDS 规范的软件结构,其软件架构图如图2 所示。
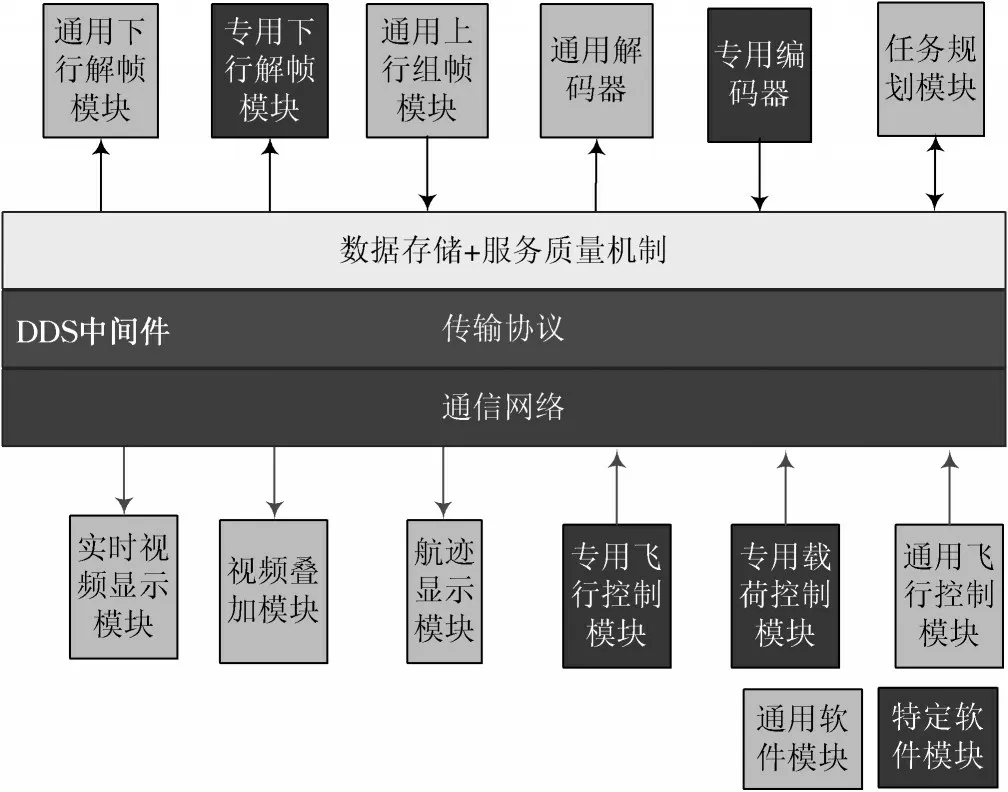
图2 基于DDS 规范的地面控制站软件架构
通过部署DDS 中间件,无人机地面控制站软件可以实现通用化的软件体系架构,主要表现在:
1) 系统以数据为中心,采用订阅者/发布者模型来分发数据,各软件模块全部通过DDS进行数据交换,可以方便加入和退出系统。无论是通用的软件模块还是特定飞机软件模块,只需按照DDS 要求的规范开发,即可实现软件模块的“即插即用”,使系统获得良好的扩展性;
2) 更加有利于软件模块化,针对“一站多机”需求势必需要更多的软件模块以适应不同机型的数据。在DDS 支撑下,各软件模块只需专注于对数据的处理即可,无需担心数据的获取问题;
3) 通过订阅/发布数据分发服务,地面站之间容易实现信息、情报共享,有利于实现多种无人机编队飞行。
3 软件功能模块设计
3.1 功能模块组成
无人机地面控制站按照通用化思路,软件功能模块组成图如图3所示。
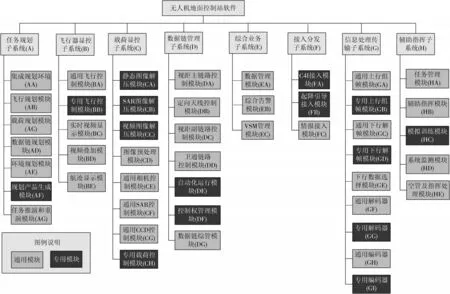
图3 软件功能模块组成图
全系统由8个子系统组成,包含47个模块级产品,各子系统及产品模块说明如下。
3.2 任务规划子系统(A)
任务规划子系统承担无人机的任务规划任务,该子系统为软件子系统,可独立于特定硬件平台,运行于通用计算机平台。该子系统由7 个软件模块组成:
1) 集成规划环境(AA):该模块为操作员提供高度集成的、图形化、可视化、具有良好人机交互平台的集成任务规划环境,便于操作员完成任务规划工作。
2) 飞行规划模块(AB):该模块为操作员提供飞行相关规划能力。
3) 载荷规划模块(AC):该模块为操作员提供载荷相关规划能力。
4) 数据链规划模块(AD):该模块为操作员提供数据链相关规划能力。
5) 环境规划模块(AE):该模块为操作员提供地理环境、气象环境、战场环境、电磁环境等多种环境规划能力。
6) 规划产品生成模块(AF):该模块将任务规划成果转换为各无人机及任务设备能够识别的产品格式,供装备使用。
7) 任务推演和重演模块(AG):该模块在执行任务前根据任务规划结果及各种态势信息进行任务预演,事后可以接收回放数据,重演任务执行过程。
3.3 飞行器显控子系统(B)
飞行器显控子系统具有显示无人机飞行器综合数据与状态、为无人机操作员提供飞行器控制的功能,确保无人机可靠、安全地完成任务。该子系统由5 个模块组成:
1) 通用飞行控制模块(BA):该模块对各型无人机的通用状态与参数进行图形化综合显示,并能够完成通用指令的生成和发送。
2) 专用飞行控制模块(BB):该模块对各型无人机的专用状态与参数进行图形化综合显示,并能够完成专用指令的生成和发送。
3) 实时视频显示模块(BC):该模块实时显示飞行器的前视视频,为操作员控制飞行器提供视频参考。
4) 视频叠加模块(BD):该模块在实时视频显示的基础上,叠加显示各型无人机的通用状态与参数。
5) 航迹显示模块(BE):该模块显示无人机预设航线信息、地理信息、态势信息,并在此基础上实时显示飞行航迹。
3.4 载荷显控子系统(C)
载荷显控子系统具有显示无人机多种载荷设备的综合参数与状态、载荷侦察信息,并为载荷操作员提供对载荷的控制功能,完成无人机侦察任务。该子系统由8 个模块组成:
1) 静态图像解压模块(CA):该模块依据所接收到的CCD 相机侦察数据,对图像进行解压恢复。
2) SAR 图像解压模块(CB):该模块依据所接收到的SAR 侦察数据,对图像进行解压恢复。
3) 视频图像解压模块(CC):该模块依据所接收到的视频图像侦察数据,对图像进行解压恢复。
4) 图像预处理模块(CD):该模块对侦察图像进行对比度、亮度、去噪、锐化等方面的预处理,以便于载荷操作员的设备控制。
5) 通用相机控制模块(CE):该模块对机载相机的通用状态与参数进行综合显示,并能够完成通用指令的生成和发送。
6) 通用SAR 控制模块(CF):该模块对机载SAR 设备的通用状态与参数进行综合显示,并能够完成通用指令的生成和发送。
7) 通用CCD 控制模块(CG):该模块对机载CCD 设备的通用状态与参数进行综合显示,并能够完成通用指令的生成和发送。
8) 专用载荷控制模块(CH):该模块对专用载荷设备的状态与参数进行综合显示,并能够完成专用指令的生成和发送。
3.5 数据链管理子系统(D)
数据链管理子系统为地面控制站提供多数据链接入、链路切换与管理功能,确保无人机与地面控制站之间的高速、高可靠、实时数据传输能力。该子系统由7个模块组成:
1) 视距主链路控制模块(DA):该模块用于对地面控制站所接入的视距主链路数据链设备进行状态监视与设备控制。
2) 定向天线控制模块(DB):该模块用于对地面控制站所接入的视距主链路定向进行状态监视与设备控制,完成天线定标、控制、数字引导等功能。
3) 视距副链路控制模块(DC):该模块用于对地面控制站所接入的视距副链路数据链设备进行状态监视与设备控制。
4) 卫通链路控制模块(DD):该模块用于对地面控制站所接入的Ku 波段卫星通信数据链设备进行状态监视与设备控制。
5) 自动化运行模块(DE):该模块用于对各种数据链的自动标校、自动切换、自动化运行等控制。
6) 控制权管理模块(DF):该模块用于监测和管理对飞行器的控制权,包括管理控制权交接过程。
7) 数据链综管模块(DG):该模块配合数据链综管设备,进行数据链选择、切换;信息路由功能;信息复分接功能;信息分发与广播功能。
3.6 综合业务子系统(E)
综合业务子系统为地面控制站提供系统监控、综合告警、地图航迹显示、数据记录等功能。该子系统由3个模块组成:
1) 数据数据管理模块(EA):该模块对地面控制站所接收、发送的全部数据进行记录管理,并能够进行事后分析及回放。
2) 综合告警模块(EB):该模块为操作员提供飞行器通用状态和参数的综合告警,包括链路告警、飞行器告警、载荷设备告警。
3) VSM 管理模块(EC):该模块监测和管理全系统的VSM 模块,为操作员提供各VSM 总状态显示及VSM的调用方法。
3.7 接入分发子系统(F)
通信接入子系统为地面控制站提供任务控制站与军用通信网之间的多种接入能力。该子系统由3 个模块组成:
1) C4I 接入模块(FA):该模块提供与C4I 系统之间的接入能力。
2) 起降引导接入模块(FB):该模块提供与起降引导设备之间的接入能力。
3) 情报接入模块(FC):该模块提供与情报处理之间的接入能力。
3.8 信息处理传输子系统(G)
信息处理传输子系统为地面控制站提供高实时、高可靠的上行信息传输服务,及高数据量、高可靠、多路共享的下行信息传输服务。该子系统由9 个模块组成:
1) 通用上行组帧模块(GA):该模块采集各控制模块发送的各种控制指令,完成通用上行遥控帧的组帧和发送。
2) 专用上行组帧模块(GB):该模块采集各控制模块发送的各种控制指令,完成专用上行遥控帧的组帧和发送。
3) 通用下行解帧模块(GC):该模块通过各种接口接收下行数据,对符合通用遥测协议的数据完成解帧和DDS 发送。
4) 专用下行解帧模块(GD):该模块通过各种接口接收下行数据,对符合专用遥测协议的数据完成解帧和DDS 发送。
5) 下行数据选择模块(GE):该模块监测各链路下行数据的接收状态,根据优先级、数据质量或在人工控制下选择最优的各种下行数据,选择结果供其他软件模块使用。
6) 通用解码器(GF):该模块在配置库的支持下,完成从遥测数据帧中解算出通用的遥测参数结果。
7) 专用解码器(GG):该模块在配置库的支持下完成从遥测数据帧中解算出专用遥测参数结果。
8) 通用编码器(GH):该模块在配置库的支持下完成对通用遥控指令的指令编码。
9) 专用编码器(GI):该模块在配置库的支持下完成对专用遥控指令的指令编码。
3.9 辅助指挥子系统(H)
辅助指挥子系统为地面控制站指挥员提供任务管理、辅助指挥、模拟训练及系统监测功能。该子系统由5 个模块组成:
1) 任务管理模块(HA):该模块为指挥员提供对无人机任务的管理能力,指挥员可利用该模块对无人机进行任务切换、任务参数修改等工作,各席位使用该模块可协调各软件模块的飞机类型和飞机地址选择。
2) 辅助指挥模块(HB):该模块依据无人机及地面控制站系统状态与参数,有针对性地为指挥员提供辅助建议,供指挥员在应急情况下借鉴参考。
3) 模拟训练模块(HC):该模块依据任务规划或真实飞行数据,驱动地面控制站设备模拟真实环境工作,供无人机操作员训练使用。
4) 系统监测模块(HD):该模块监测全系统软件模块的运行状态,管理各种数据的交互情况,监视和分析遥控指令是否产生冲突。
5) 空管及指挥处理模块(HE):该模块完成与地面空管系统的数据交互,接收空管系统指令,发送飞机当前位置及航点信息。
4 结 语
地面控制站软件是一个复杂的软件系统,具有功能类别多、管理设备多、接口种类多、运行模式多等特点。在多种型号无人机之间实现地面控制站通用化和多机协同控制,首先必须完成软件通用化。
软件系统是地面指挥控制站的核心,通过“通用+专用模块”设计,底层采用DDS 中间件技术,界面显示采用模块化设计方法,基本可以实现地面控制站软件的通用化,后续还需分步骤在新研制的型号上进行具体实施,尤其还需研究消息标准的建立,最终实现无人机地面控制站软件通用化。
