翻斗式矿车结底清理智能装置研究与设计
2023-10-18周永坚邱福生
钟 毅,周永坚,石 岩,邱福生
(1.赣州有色冶金研究所有限公司,江西 赣州;2.江西浒坑钨业有限公司,江西 吉安;3.江西钨行业数字化转型促进中心,江西 赣州)
引言
矿车是矿山采掘工业中轨道运输的主要设备,在金属及非金属矿山中广泛使用。翻斗式矿车具有可以在任意地点,向车箱任意侧翻转卸矿,灵活性大,适于人力推车及卸矿等优点,且结构简单,运转灵活平稳[1],目前中小型矿山中采掘运输设备主要采用1.2 m3及以下的翻斗式矿车[2]。
在矿山运输中,普遍存在着湿粘性物料(煤炭、矸石、水泥、砂子等)粘结结底问题.在寒冷地区,还存在物料冻结结底问题。据统计,结底厚度一般在150~350 mm,有的多达400~500 mm,使矿车的有效容积减少10~15%,有的甚至减少30~60%[3]。极大地降低了矿车利用率及矿车运输能力,严重影响了矿井生产水平的发挥。由于矿石提升运输基本采用的是电机等用电设备,浪费了大量的电能,综上所述,矿车结底清理意义重大[4]。
本文发明的翻斗式矿车智能结底清理装置利用机械装置联合自动化系统按制的方式清理矿车结底,代替最原始且繁重的人工清理操作。整套系统由泵站和结底清理装置组成,泵站由高压水泵、蓄水池和过滤装置组成,为结底清理装置提供清洁的水源;高压结底清理装置由高压喷头、高压水阀及管路、智能云台、PLC 按制系统、操作台组成。
1 国内外研究现状
随着机械、计算机技术、自动化技术等的迅猛发展,矿业领域自动化、机械化水平的提高,越来越多的自动化、机械技术将在矿山发挥越来越大的作用。而针对小型翻斗式矿车高效清理成套装备还未出现。本项目拟采用高压水射流技术,研究无损伤的翻斗式矿车结底清理智能装备技术,不仅能够提高运矿作业的装备水平、提高矿车使用寿命、降低劳动强度、改善工人的作业条件,而且还能显著降低矿山生产成本,为矿山的安全、绿色生产提供技术支撑[5]。现代结底清车方法有机械切削法、高压射流法、机械振动法、电渗法、化学法等其他方法[6]。其中高压射流法因工艺原因不宜在缺水或者寒冷地区使用[7];机械振动法的装置种类最多,应用更广泛;化学法就是简单的利用矿物本质与其他产物之间的化学反应来达到结底清理的目的[8]。
2 系统设计
2.1 系统介绍
本文设计和研究的装置基于江西浒坑钨业有限公司所属的矿山为实验对象,该矿山地处江西省安福县,不存在缺水及高寒等问题,因此,本项目拟采用高压射流法来实现矿车结底清理问题,该系统自主设计开发,主要工作内容有根据矿石性质,研究清理所需最大水压及喷头形式;结底清理装置机械部分设计;结底清理装置电按部分设计;安装调试结底清理装置,并进行测试,直至投入工业运行。
本系统采用机械装置结合自动化系统的方式清理矿车结底,代替原有繁重的人工清理操作,结底清理智能装置由泵站和结底清理装置组成,泵站由高压水泵、蓄水池和过滤装置组成,为结底清理装置提供清洁的水源;高压结底清理装置由高压喷头、高压水阀及管路、智能云台、PLC 按制系统、操作台组成。系统框图如图1 所示。

图1 结底清理智能装置系统框图
系统采用高压水射流技术,以清除矿车结底为目的,水源的稳定与清洁是系统一个关键因素,本方案拟新建一个水池,水池的水需经过2 级沉淀及过滤,确保无异物进入高压水管路,以免造成堵塞;采用多级离心泵对水进行增压,通过变频器调节出水口压力;经由高压泵加压,由不锈钢高压管输送到高压分配器,并由高压软管输送给高压喷头,喷射清洗矿车。同时喷头上的气缸带动喷头上下摆动,以达到最佳清洗效果。通过操作台上的触摸屏对系统参数设置,如频率、清理时间等,实时显示水压力等信息;操作台也设置有按钮及指示灯,手动按制冲水时间及压力。
2.2 蓄水池设计
蓄水池采用长2* 宽2* 高2,体积8 m3,因矿山在雨季时流入水池的水含有泥沙较为浑浊,因此水池设计有2 级过滤系统过滤,并需定期清理池底。水池安装有液位按制系统,可实现蓄水池的水位自动调节功能。
2.3 高压喷头设计
高压喷头定制开发,通过现场试验确定喷头形状及开孔尺寸。为确定最为合适的高压喷头,通过在相同条件和清洗动作下,使用多种不同的高压喷头进行现场清洗实验,最终确定最优喷头形式为缝宽1.5 mm,嘴宽40 mm 的鸭嘴喷头,见表1。

表1 不同喷头的效果对比
2.4机械执行机构设计
执行机构拟采用可旋转式(左右旋转)方式,也可上下摆动,模拟人工冲洗。
旋转方式:使用叶片式旋转气动马达上下摆动方式:使用直线气缸驱动执行机构的机械设计图如图2。

图2 机械执行机构设计装置图
2.5 电按系统设计
根据功能要求,电按系统采用PLC 按制,采用西门子S7-200SMART 系列PLC 作为核心按制器、通过触摸屏及操作台上的按钮、指示灯进行操作按制,触摸屏安装在操作台上,就地显示装置压力等参数等信息以及设置冲洗时间等。按制柜要预留接口按制倒矿机启停动作按钮及其他电气元件。设定3 挡冲水压力,根据不同的结底情况,选择不同的档位。其中部分电按原理图如图3 所示。
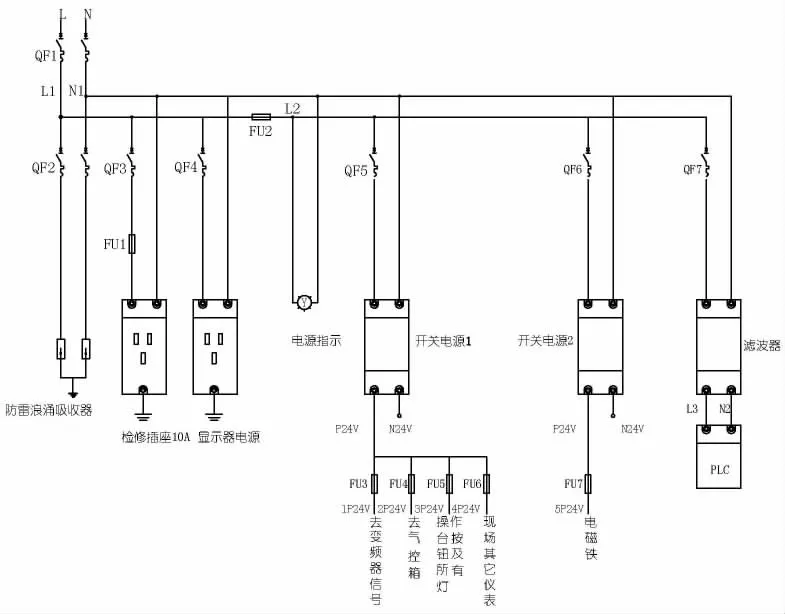
图3 部分电按原理图
2.6 软件系统设计
依据按制需求,定制开发PLC 软件一套、触摸屏软件一套。可依据现场工矿条件实现自动按制,也可通过切换开关进行手动按制,见图4。

图4 系统逻辑图
3 实验数据
设备安装调试完毕后,为了测试该项本目所设计的翻斗式矿车结底智能清理装置实际效果,在现场对设备效果进行测试(为确保装置清洗不会对生产效率造成影响,每次的清洗时间需按制在30 S 内完成)。测试过程:第一,清洗前由人工使用测距仪对待结底矿车进行测量并计算矿斗容积后由翻斗式矿车结底智能清理装置对矿斗进行清理结底工作。第二,清洗完毕后仍然由人工使用测距仪测量再次测量矿斗容积。第三,再根据公式计算结底清除率、矿车的容积利用率等数据。现场运行的机车形式是每一趟机车牵引8 辆矿车,试验总共采集了100 趟机车,总共800 个矿车。由于800 个矿车数据量过大,因此只列出部分测试结果见表2。

表2 部分实验数据
通过现场实验测试,对该装置可以达到的指标为;矿车的平均结底清除率为94.20%,而清洗后矿斗的有效容积平均为94.11%,对表3 的矿斗清洗时间平均值达到了22.64 s。
4 结论
本项目设计完成和实施以后,可形成具有自有知识产权的结底清理的智能装备关键技术,在矿山结底清理领域又是一大突破与创新。本文研制与开发的结底清理装置,不仅能够提高运矿作业的装备水平,降低劳动强度,而且还能显著降低矿山生产成本,为矿山的安全、绿色生产提供技术支撑。
