深水平台供应船动力定位系统的操作及应用
2023-10-18李亮亮王德开
李亮亮,王德开
(大连中远海运重工有限公司,辽宁大连 116113)
0 引言
随着船舶行业的快速发展,船舶动力定位(Dynamic Positioning,DP)系统目前广泛应用于各类海洋工程船当中[1-3]。动力定位是一种通过推进器或锚系而自动保持海上浮动装置的定位方法。此方法通过控制推进器来提供抵抗海风、海浪、洋流等作用在船上的环境力,其定位计算机可根据参数传感器所测定的船位数值自动地发出控制信号来调整推进器转速、桨叶方向,从而使船舶尽可能地保持在特定位置[4-5]。动力定位的优点在于不受水深限制,适合用于深水海域作业的工程船。本文以某深水平台供应船为例,结合动力定位的标准要求,对动力定位系统与相关电力系统的配置进行介绍,对动力定位系统的相关操作及应用进行分析。
1 船舶基本情况
该深水平台供应船长85.400 m,型宽20.000 m,吃水7.163 m,入级中国船级社(China Classification Society,CCS),船级符号DP-2,具有近海服务、水下探测、海上消防等功能。设备参数及布置情况分别见表1 和图1。

图1 设备布置图
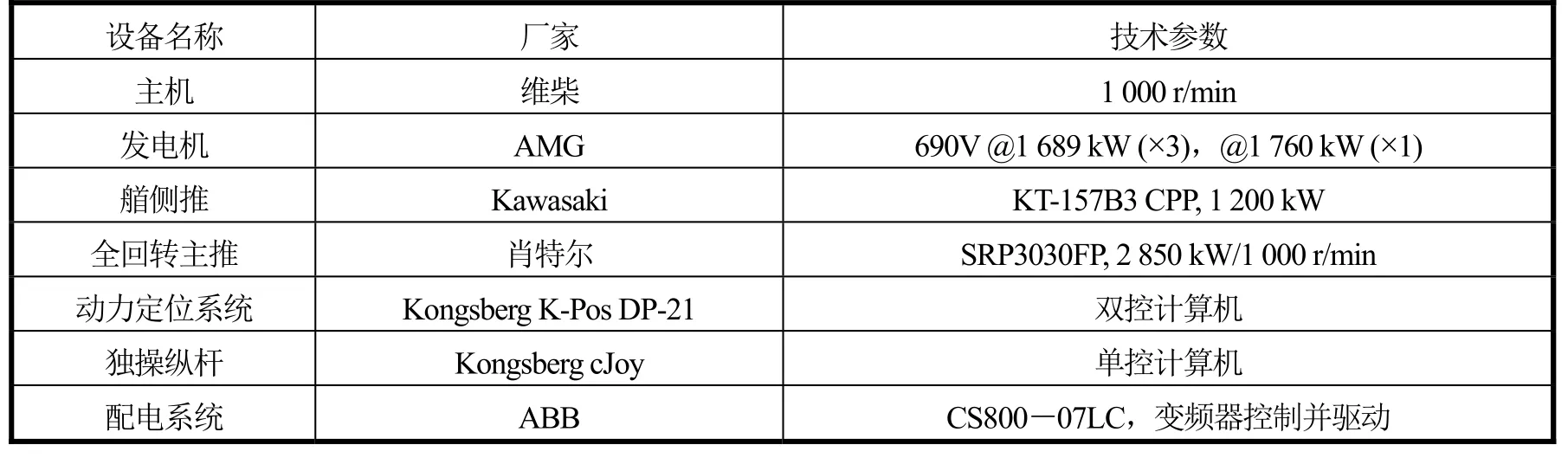
表1 设备参数表
2 DP 系统简介
本船配备DP 系统,包括控制系统和独立的操纵杆系统,具体配置见图2。

图2 DP 系统配置图
2.1 一般操作状态
本船DP 系统配置了2 个DP 操作站,每个操作站都,连接到1 个控制器,且主/副操作站和主/副控制器均互相冗余。DP 系统通过各传感器和船舶电站获得环境数据、位置数据、功率数据等参数来保持船位稳定。DP 主控制器发送命令到推进器的可编程逻辑控制器(Programmable Logic Controller,PLC)系统。主操作站连接的主控制器可由操作员人为选定,副操作站连接的副控制器会自动启用并接管控制。当主操作站发生故障时,主控制系统传输控制和周围环境信号到副操作站与副控制系统,副操作站与副控制系统在接管控制时不会引起任何扰动,可实现无缝切换。
2.2 独立操纵杆系统
独立操纵杆系统包括1 个控制箱和1 个操纵终端。独立操纵杆系统是通过DP 控制系统对推进器系统进行控制,船舶通过独立操纵杆系统可实现自动艏向和手动位置控制。独立操纵杆系统只是一个备用的系统,其在DP 操作期间处于关闭状态。独立操纵杆系统由220 V 应急配电板进行供电。
2.3 通信系统
操作站包括控制电脑、显示器和操作控制面板。主控制系统包括PLC、网络交换机和通信模块。每台控制电脑均有2 个网络端口,这2 个网络端口为控制电脑和PLC 提供了冗余通信。控制单元和工作站通讯系统示意图见图3。

图3 控制单元和工作站通讯系统示意图
2.4 模式选择开关
操作员可以通过安装在DP 控制台上的旋转开关来选择工作模式。
2.5 不间断电源(Uninterruptible Power Supply,UPS)分配
DP 系统配备2 套UPS,1 号UPS 为1 号电源供应模块、1 号操作站、报警打印机、1 号罗经、1号风速仪、1 号差分全球定位系统(Differential Global Position System,DGPS)、微波定位参考系统、1 号垂直参考单元供电。2 号UPS 为3 号电源供应模块、2号操作站、2号罗经、2号风速仪、2号DGPS,2 号垂直参考单元进行供电。
2.6 DP 参考系统
2.6.1 DGPS
DGPS是一个GPS和天基增强系统信号接收单元,具备接收国际航标协会(The International Association of Marine Aids to Navigation and Lighthouse Authorities,IALA)岸基信号和 FUGRO SeaStar SGG 信号的能力,分别通过IALA 天线和Spot Beam 天线接收差分信号。DPS112 可以接收L1 和L2 波段卫星传输信号来自动执行电离子层失真误差校正。
2.6.2 微波雷达参考系统RADius
微波雷达参考系统RADius 用于提供精确的位置数据给船舶的DP 系统。RADius 包括2 个收发机和1 个应答机。收发机安装在平台供应船的主甲板上,应答机安装在对方的船舶或钻井平台上。RADius 提供平台供应船到对方船舶或钻井平台的距离和方位到DP 系统,并以此来移动本船靠近或者远离目标。
2.6.3 罗经系统
本船配备2 套罗经系统,提供艏向信号到DP系统。1 号罗经同时提供艏向信号到独立操纵杆系统和其他通信导航系统。罗经输出标准的NMEA0183 格式信号到DP 系统。每个罗经的主电源由DP 系统的UPS 供电。
2.6.4 风速仪系统
本船装配有超声波风速仪,风速仪的数据可显示在驾驶室的显示单元上,供平时航行使用。风速仪提供标准的NMEA0183 格式的信号到DP 系统。1 号风速仪还提供信号到独立操纵杆系统。
2.6.5 垂直信号参考单元
垂直号参考单元通过使用加速度计技术,以对船舶3 个位面的运动进行检测。这些装置通常不能进行船上维修,而必须承受设备更换的影响。
3 电力系统
3.1 电力系统组成
电力系统根据系统逻辑可分为A 网和B 网。3台690 V/1 689 kW柴油发电机和1台690 V/1 670 kW柴油发电机为整个电力系统供电。电力系统单线图见图4。

图4 电力系统单线图
在进行DP 操作时,2 个配电板之间的联络开关保持断开的状态,1 号和2 号发电机并机工作,给690 V 配电板A 供电;3 号和4 号发电机并机工作,给690 V 配电板B 供电。400 V 应急配电板通常由400V配电板A供电。2个400 V/220 V 150 kVA的变压器同时为220 V 配电板A 和B 供电。220 V应急配电板由应急变压器ET1 或ET2 供电。在任意时间,只有1 个变压器处于工作状态。在启动DP操作之前,所有的配置状态应该罗列于机舱的日常检查列表并报告到DP 操作站。
3.2 电源功率管理系统(Power Management 3.2 System,PMS)
本船的电源功率管理系统包括ABB ACS800M微处理器、通信模块、输入输出模块等。本船的PMS安装在主配电板的专用小柜子内,包括2 个PLC。每个PLC 的中央处理器(Central Processing Unit,CPU)由PMS 的UPS 供电。
3.3 UPS 系统
本船配有4套UPS系统,分别为UPS10、UPS20、UPS30 和UPS40。
4 DP 操作
4.1 DP 操作时的系统配置
DP 操作时发电机和推进器的配置如下:
1)4 台发电机同时在线。
2)所有推进器均在线。
3)1 号侧推由690 V 配电板A 供电。
4)左主推由690 V 配电板A 供电,其转舵系统电源由400 V 主配电板供电。
5)2 号侧推由690 V 配电板B 供电。
6)右主推由690 V 配电板B 供电,其转舵系统电源由400 V 主配电板供电。
DP 操作时的开关状态如下:
1)690 V 配电板A 与B 间的联络开关6ACB处于断开状态。
2)400 V 配电板A 与B 之间的联络开关13ACB 处于断开状态。
3)220 V 配电板A 与B 之间的联络开关BT/MCCB 处于断开状态。
4)690 V/400 V,800 kVA 变压器1 号和2 号同时在线。
5)400 V/220 V,150 kVA 变压器3 号和4 号同时在线。
6)400 V 应急配电板主要供电由400 V 配电板A 供电。
7)应急发电机处于备用模式。
8)400 V/220 V,50 kVA 的应急变压器1 号在线,2 号备用。
9)UPS10 和UPS20 之间的机械化开关处于断开状态。
10)UPS30 和UPS40 之间的机械化开关处于断开状态。
11)连接220 V 应急配电板和航行分电箱的开关均断开。
12)连接220 V 应急配电板和UPS10~UPS40的开关都断开。
在进行DP 操作时,燃油系统、滑油系统、滑油系统、艏侧推淡水冷却系统、启动空气系统的相关隔离阀门状态需保持一致。
4.2 操作员工作站
该船配有2 个DP 操作员工作站,每个工作站包括1 个用于对系统进行监控和操作的高分辨率彩色纯平触摸屏和1 个包含多个按钮、指示灯和控制操纵杆的操作面板。电源开关和用于显示的调节控制器位于屏幕下方。操作面板主要包括专用按钮、状态指示灯、键盘、轨迹球、3 轴操纵杆和艏向控制旋钮,见图5。

图5 操作面板
4.3 操作注意事项
4.3.1 参考传感器
该船配备3 个独立的参考传器。在大型设施(如海上平台)附近作业时,2 个微波雷达位置参考系统都有可能遭到来自卫星或多径反射的屏蔽,这可能会造成定位系统常见的位置漂移。如果2 个位置参考系统一同漂移,DP 系统将会剔除微波雷达位置参考系统,只剩下DPGS。
4.3.2 风传感器
当在海上平台的背风侧作业时,风传感器可能会被遮蔽,同时船舶的一部分会暴露在巨大的风力下。这会导致恶劣天气条件下的航迹精度较差,从而影响船舶定位的稳定性。
4.3.3 通信
必须建立同平台间的通信,以获得进入其500 m范围的许可。在此之后,必须建立并测试同吊机操作员和甲板管理人员的通信渠道。
5 结论
本文以某深水平台供应船为例,结合动力定位的标准要求,介绍了动力定位系统与相关电力系统的配置,并分析了动力定位系统的相关操作及应用。研究成果可为动力定位系统在深水平台供应船的应用提供一定参考。
